Устройство промышленного робота
Рассмотрим устройство промышленного робота на примере универсального ПР четвертой модификации (ПР-4). его конструктивная схема показана на рис.1.
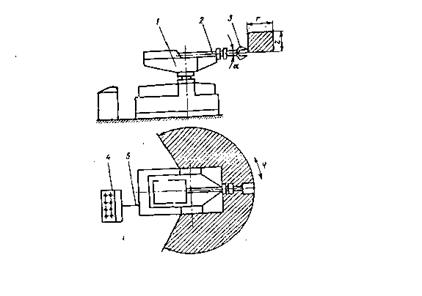
Рисунок.1 - Конструктивная схема промышленного робота ПР-4: I - манипулятор; 2 - рука; 3 - схват; 4 - управляющее устройство; 5 - кабель
Манипулятор I обеспечивает выполнение движений руки 2 по направлениям r (до 600 мм) и z(до 150 мм), поворот механической руки со cхватом 3 в направлении углов:  (разворот в горизонтальной плоскости до 240°) и угла
(разворот в горизонтальной плоскости до 240°) и угла  , (поворот в вертикальной плоскости до 15°). Перемещение cхвата 3 в заданную точку рабочей зоны осуществляется манипулятором с точностью позицирования ±0,1 мм.
, (поворот в вертикальной плоскости до 15°). Перемещение cхвата 3 в заданную точку рабочей зоны осуществляется манипулятором с точностью позицирования ±0,1 мм.
Рука 2 манипулятора отрабатывает эти движения с помощью пневматических цилиндров, расположенных в корпусе манипулятора и механической руке, выполняющих функции приводных устройств.
Управляющее устройство 4 выдает 60 команд управления манипулятору. Подключается оно к манипулятору с помощью кабеля 5.
Управляющая программа составляется путем набора на командной панели управлявшего устройства 4 нужной последовательности команд для отработки требуемых движений. Каждая команда такой программы называется кодом программы. Программирование несложное, для него не применяется специальный программный язык.
Данный робот предназначен для выполнения производственных операций загрузки и выгрузки заготовок (деталей) массой до 5 кг при обслуживании различного оборудования.
Робот ПР-4 является универсальным, легким, стационарным, напольного типа с пневмоприводом, оснащен устройством циклового программного управления, имеет 4 степени подвижности, массу 550 кг, габариты  .
.
Дата добавления: 2016-10-17; просмотров: 1807;