Число степеней подвижности и кинематические пары ПР
Манипуляционные возможности ПР характеризуют число степеней подвижности (свободы), иначе говоря число управляемых осей (суставов) манипулятора. Чем больше таких осей, тем больше степеней подвижности имеет рука ПР, тем выше ее маневренность и гибкость.
С целью перемещения объекта манипулирования (детали, схвата с деталью) в любую точку рабочего пространства необходимо иметь определенное число степеней подвижности. Поэтому перед разработчиками промышленных роботов возникает вопрос: сколько степеней подвижности должен иметь конкретный проектируемый робот? Известно, что рука человека - образец для создания роботов - имеет 27 степеней подвижности (с учетом фаланг пальцев). Разумеется, что построение полного аналога руки человека - задача весьма сложная и не всегда целесообразна. (Правда, в Японии созданы роботы, манипуляционное устройство которых по своей кинематике близко к руке человека, К примеру, такими "руками" робот разливает жидкость в бутылки, закрывает их пробкой, наклоняет в любую сторону и на любой угол).
В простейшем случае достаточно шести степеней подвижности, чтобы доставить схват в любую точку рабочего пространства с произвольной ориентацией.
С целью удешевления роботизации производственных операций следует организовать технологический процесс таким образом, чтобы можно было обойтись промышленными роботами с минимальным числом степеней подвижности.
Число степеней подвижности манипулятора ИР определяется числом степеней свободы кинематической цепи относительно неподвижного звена. В открытых кинематических цепях, к которым относят манипуляторы ПР, число П. подвижных звеньев всегда равно числу кинематических пар Р .
Известно, что для незамкнутой кинематической цепи число степеней подвижности IV определяют по формуле Сомова - Малышева

Где n - число подвижных звеньев в манипуляторе;
P5 - P1 - пары соответственно V - I классов. При выборе кинематической цепи манипулятора следует учитывать, что наиболее просто организуются траектории, соответствующие движению по одной координате.
Поэтому оправдано, что наиболее распространенные компоновки ПР образованы кинематическими парами V класса (поступательными и вращательными).
Для кинематической цепи, образованной только кинематическими парами V класса, число степеней подвижности находят по формуле

Обозначим (см. рис. 1) поступательные движение кинематической пары V класса символом S, вращательное движение вокруг оси - символом R, вращение изгибом - вращение вокруг оси, перпендикулярной к продольной оси звена - символом Р.

Рисунок 1.- Схема кинематических пар V класса, используемых в ПР
Из ограниченного набора кинематических пар при их различных сочетаниях формируют большое число механизмов с различными видами движения и возможностями. Последовательность соединения кинематических пар между собой при анализе и синтезе ПР удобно представлять в виде символических обозначений типа R - S - P.Понятно, что любая компоновка из множества возможных сочетаний кинематических пар может использоваться в ПР, но выбoр конкретной компоновки должен осуществляться, исходя из технологических требований заданной траектории движения, определяется типом применяемого привода и способом размещения двигателей.
Различные сочетания кинематических пар определяют технические, характеристики и возможности промышленных роботов. На рис. 2 показаны наиболее применяемые компоновки промышленных роботов, образованные кинематическими парами V класса.
На рис. 2.а показана компоновка отечественного промышленного робота ТУР - 10 (расшифровывается как технологический универсальный робот грузоподъёмностью 10 кг), используемого на операциях сварки, сборки, погрузки-выгрузки, зачистки заусенцев и др. Его манипулятор имеет пять степеней свободы и_характеризуется компоновкой R-P-P-P-R в ангулярной (нерегулярной) системе координат, напоминая, в некотором роде руку человека. Наиболее просто у ТУР - 10 осуществляется движение по окружности, а для выполнения прямолинейной траектории движения в пространстве необходимо согласованное движение различных кинематических звеньев.
Промышленный робот W500 фирмы"Уикман автомейшн" (рис. 2,б) имеет три степени свободы ( R-S-S) и находит применение на сборочных операциях. На рис. 2,в показан ПР "Прагма А3000" модульного типа, имеющий набор базовых узлов, из которых на рабочем месте создаются конфигурации, оптимально приспособленные к конкретным технологическим условиям производства. Из ПР этого типа легко создают сборочные линии.
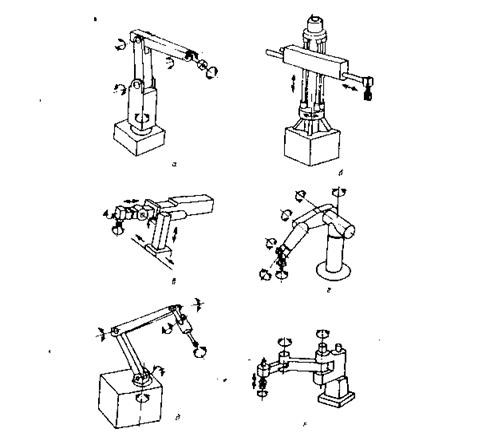
Рисунок 2 - Некоторые конструктивные компоновки ПР
Лекция 4
Дата добавления: 2016-10-17; просмотров: 3732;