Искусственный интеллект
Об искусственном интеллекте ведутся достаточно острые дискуссии и на страницах периодической печати, и на научных конференциях, и в студенческой аудитории. Основной вопрос дискуссии: возможно ли создать техническую систему - Искусственный мозг - полностью воспроизводящую функции человеческого мозга?
Специальный Комитет Японии по ПР предлагает в качестве критерия три категории способностей, которыми обладает живое существо: умственные, функциональные и физические. Согласно этому рис. 4 иллюстрирует количественную картину упомянутых способностей человека, ПР, металлургической машины, информационной машины. По оси А отложены уровни физических возможностей, по оси Б - уровни функциональных возможностей и по оси Н -уровень интеллектуальных возможностей или просто интеллекта. Условное трехмерное пространство дает представление о способах и возможностях человека (I), промышленного робота (2), металлургической (3) и информационной машин. Из рисунка следует, что интеллектуальные возможности современных роботов ещё весьма далеки от интеллектуальных возможностей человека.
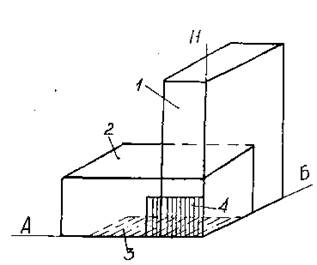
Рисунок 4 - Количественная картина категорий способности
Под уровнем интеллекта Специальный Комитет понимает способности ощущения, восприятия и "создания", сюда же включают память, логику, способность к обучению и т.д. функциональные способности означают универсальность, мобильность. Физические возможности включают силу, скорость, способность к непрерывной работе, надежность и т.д.
Теперь, кратко подытожив сказанное, можно дать определение, что искусственный интеллект ПР - распознание образов, анализ первичной информации, оценка сложившейся ситуации и принятие решений.
Сегодня усилия ученых и конструкторов, занимающихся робототехникой, направлены на совмещение возможностей человеческого мозга с искусственным интеллектом в одной биотехнической системе с целостностным распределением функций между человеком и роботом. Это начало нового этапа научно-технической революции.
Лекция 3
1. Основные технические характеристики и параметры
промышленных роботов
Основные технические, показатели промышленных и металлургических роботов обусловливаются предполагаемой областью применения и условиями выполнения технологической операции (работы). К числу важнейших характеристик ПР и манипуляторов относится номинальная (наибольшая проектная) грузоподъёмность.
Основные параметры исполнительных устройств ПР, согласно ГОСТ 26050-89, представлены в табл. 1
Таблица 1
| Параметр | Значение параметра |
| Номинальная абсолютная пог-решность позицирования,мм | 0,05; 0,1; 0,16; 0,25; 0,5; 1; 1,5; 2,5; 5; 10; 20 |
| Максимальные перемещения: | |
| Линейные, мм | 12, 20, 32, 50, 80, 100, 125, 160, 200, 250, 320, 400, 500, 630, 800, 1000, 1250, 1400, 1600, 1800, 2000 |
| Угловые, град | 15, 30, 45, 60, 90, 120, 180, 310, 240, 260, 300, 360, 400. |
| Максимальная скорость: | |
| Линейная, м/с | 0,1; 0,2; 0,4; 0,5; 0,6; 0,8; 1; 1,25; 1,6; 2; 2,5 |
| Угловая, град/с | 30, 45, 60, 90, 180, 360 |
 Рабочая зона (РЗ) - пространство, в котором может находиться исполнительное устройство (манипулятор) при функционировании ПР. РЗ характеризуется формой и размерами.
Рабочая зона (РЗ) - пространство, в котором может находиться исполнительное устройство (манипулятор) при функционировании ПР. РЗ характеризуется формой и размерами.
Рабочая зона ПР - объём обслуживаемого им пространства также различна. Для стационарных -этот объём колеблется от 0,01 до 10 м3. Мобильные (передвижные) ПР не имеют ограниченной рабочей зоны. Существуют четыре рабочих зоны ПР, которые имеют соответствующие объёмы, м3: I) микрозона - менее I; 2) малая - 1...2 ; 3) средняя - 2...5; 4) большая - более 5.
Важнейшая характеристика ПР - точность установки манипулятора и самого ПР в целом в заданной позе. Эта характеристика называется точностью позицирования.
Точность позицирования ПР - точность выхода ПР в заданную точку и точность отработки траектории движения по всей рабочей зоне.
На точность позицирования влияют следующие факторы: грузоподъёмность, конструкция и кинематика рабочих органов, тип привода, точность датчиков положения, совершенство системы управления и порядка (алгоритмов) её действия.
Различают такие классы точности позицирования ПР, мм: I) прецизионный (сверхточный) - до 0,1 ; 2) высокоточный - 0,1...0,5; 3) точный - 0,6...1,0; 4) средний - 1,1...2,0 ; 5)грубый- более 2,0.
Погрешность позицирования - отклонение рабочего органа ПР от заданного управляющей программой. Точность позицирования современных ПР составляет + (0,5..1,0)мм, а в кузнечно-прессовом, например, имеет + 3 мм.
Наибольшие требования к точности позицирования предъявляются на сборочных операциях (сборке изделий), печатании плат и других тонких работ. Следует отметить, что повышение точности позицирования влечет повышение стоимости робота, а увеличение быстродействия последнего вступает в противоречив с точностью позицирования.
Быстродействие ПР.
Как правило, быстродействие ПР равно(или больше) быстродействию человека при выполнении тех же операций. Средние скорости поступательного движения исполнительных механизмов роботов достигают сегодня 0,5...1,0 м/с, а максимальные - до 5 м/с. Повышение быстродействия является одной из важнейших задач повышения эффективности использования ПР.
О быстродействии ПР можно судить по данным табл. 2, где приведена техническая характеристика ПР (его модулей) японской фирмы "Мицубиси".
Таблица 2
| Координатный модуль (наименование перемещения) | Рабочий диапазон | Максимальная скорость |
| Горизонтальный ход руки | 1350 мм | 1000 мм/с |
| Вертикальный ход руки | 500 мм | 500 мм/с |
| Поворот руки относительно горизонтальной оси | 
| 600/с |
| Поворот руки относительно вертикальной оси | 2500 | 1000/с |
| Движение кисти | 1800 | 1000/с |
| Перемещение основания | 500 мм | 500 мм/с |
Время паузы на изменение действия привода колеблется в пределах 0,1 ...0,5 с.
Следует отметить, что в настоящее время скорость поступательного перемещения рабочих органов ПР достигает 10 м/с, а при вращательном движении - 360 град/с.
Дата добавления: 2016-10-17; просмотров: 1265;