Зависимость между моментом силы относительно оси и моментом силы относительно точки, которая лежит на этой оси
Установим зависимость между моментом силы  относительно точки О (рис. 6.6) и моментом этой силы относительно оси Оz.
относительно точки О (рис. 6.6) и моментом этой силы относительно оси Оz.
 Рисунок 6.6
Рисунок 6.6
| Раньше, (формула (6.1)) мы получили, что модуль момента силы относительно точки О равен двум площадям треугольника ОАВ. Нетрудно убедиться, что момент силы относительно оси Оz равен двум площадям треугольника ОА1В1. Как известно из школьного курса геометрии, площадь проекции треугольника ОАВ на плоскость І равна площади треугольника ОАВ, умноженной на косинус угла между плоскостями, в которых находятся эти треугольники
 . .
|
Помножим обе части этого равенства на два, получим:
 ,
,
то есть
 (6.9)
(6.9)
Вывод.
| Проекция момента силы относительно точки на ось, которая проходит через эту точку, равна моменту силы относительно этой оси. |
Если поменять точку, то есть рассмотреть момент силы относительно другой точки, т. О1, это уже будет другой треугольник О1АВ. Но проекция его на плоскость І будет такая же – ΔОА1В1, то есть формула (6.9) имеет место для произвольной точки, которая принадлежит оси Оz. Раньше (формулы 6.6), мы получили проекции момента силы относительно точки О на координатные оси Ох, Оу, Оz. Сравнивая формулы (6.6) и (6.9), получим аналитические формулы для определения моментов силы относительно координатных осей, а именно:
 (6.10)
(6.10)
где: x, y, z - координаты точки, в которой приложена сила;
Fx, Fy, Fz - проекции вектора силы на оси координат.
6.5 Возможные случаи приведения системы сил, произвольно расположенных в пространстве. Инварианты «Статики»
Согласно основной теореме статики (тема 4), в общем случае система сил  , произвольно расположенных в пространстве, может быть заменена одной силой, главным вектором
, произвольно расположенных в пространстве, может быть заменена одной силой, главным вектором  , и одной парой сил, момент которой равен главному моменту относительно центра приведения (точки О)
, и одной парой сил, момент которой равен главному моменту относительно центра приведения (точки О)  .
.
Возможны частные случаи приведения пространственной системы сил к заданному центру.
Случай 1.  система сил приводится к паре сил, момент которой равен главному моменту. В этом случае главные моменты системы сил относительно всех точек пространства геометрически равны.
система сил приводится к паре сил, момент которой равен главному моменту. В этом случае главные моменты системы сил относительно всех точек пространства геометрически равны.
Случай 2.  система сил приводится к равнодействующей, которая проходит через точку О (центр приведения).
система сил приводится к равнодействующей, которая проходит через точку О (центр приведения).
Случай 3.  . Покажем, что в этом случае систему можно привести к одной силе, а значит, равнодействующей.
. Покажем, что в этом случае систему можно привести к одной силе, а значит, равнодействующей.
Имеем силу  , приложенную в точке О и пару сил с моментом
, приложенную в точке О и пару сил с моментом  , который перпендикулярен силе
, который перпендикулярен силе  (рис. 6.7 а).
(рис. 6.7 а).
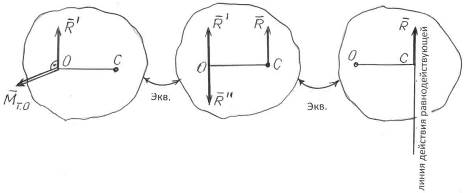
а б в
Рисунок 6.7.
Изобразим пару сил, момент которой известен, , двумя силами: одну силу  приложим в точке О (рис. 6.7 б) и направим противоположно силе , вторую силу пары
приложим в точке О (рис. 6.7 б) и направим противоположно силе , вторую силу пары  приложим в точке С параллельно на расстоянии
приложим в точке С параллельно на расстоянии  . Модули всех трех сил одинаковые
. Модули всех трех сил одинаковые  . Таким образом, вместо силы и пары
. Таким образом, вместо силы и пары  получим одну силу
получим одну силу  (рис. 6.7 в), потому что
(рис. 6.7 в), потому что 
 .
.
В этом случае система сил приводится к равнодействующей, которая приложена в точке С на расстоянии
 (6.11)
(6.11)
от «старого» центра приведения, точки О.
 Случай 4.
Случай 4.  параллельна
параллельна  динама. В этом случае пара, момент которой равен главному моменту, расположена в плоскости перпендикулярной главному вектору, изобразим её силами
динама. В этом случае пара, момент которой равен главному моменту, расположена в плоскости перпендикулярной главному вектору, изобразим её силами  (рис. 6.8), тогда
(рис. 6.8), тогда  .
.
Совокупность силы и пары сил  (с моментом
(с моментом  ), которая расположена в плоскости, перпендикулярной линии действия силы
), которая расположена в плоскости, перпендикулярной линии действия силы  , называют силовым винтом или динамой.
, называют силовым винтом или динамой.
Название силовой винт объясняется движением по винтовой линии под действием такой совокупности  .
.
Случай 5.  , главный вектор и главный
момент образуют угол α
(α ≠ 0, α ≠ 90о, α ≠ 180о).
Это наиболее общий случай приведения произвольной системы сил к центру (рис. 6.9). Покажем, что в этом случае система сил приводится к силовому винту (динаме). , главный вектор и главный
момент образуют угол α
(α ≠ 0, α ≠ 90о, α ≠ 180о).
Это наиболее общий случай приведения произвольной системы сил к центру (рис. 6.9). Покажем, что в этом случае система сил приводится к силовому винту (динаме).
| 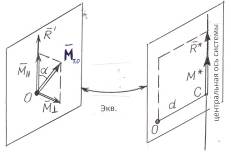 Рисунок 6.9
Рисунок 6.9
|
Для этого момент пары разложен на две взаимно перпендикулярные составляющие
 . (6.12)
. (6.12)
Величины этих составляющих такие:
 , (6.13)
, (6.13)
их направления:  . С вектором
. С вектором  и силой
и силой  поступим так же, как в случае 3. То есть, получим силу
поступим так же, как в случае 3. То есть, получим силу  , которая приложена в точке С на расстоянии
, которая приложена в точке С на расстоянии
 . (6.14)
. (6.14)
Пару сил с моментом  (учитывая то, что момент пары является свободным вектором) приложим в этой же точке С и обозначим
(учитывая то, что момент пары является свободным вектором) приложим в этой же точке С и обозначим  . Получим, как в случае 4, силовой винт (динаму). Прямая, по которой действует сила динамы, называется центральной осью системы.
. Получим, как в случае 4, силовой винт (динаму). Прямая, по которой действует сила динамы, называется центральной осью системы.
Силовой винт называют правым, если направления и  совпадают и левым, если угол между и равен 180о.
совпадают и левым, если угол между и равен 180о.
Таким образом, в этом случае система сил приводится к силовому винту, центральная ось которого параллельна главному вектору и расположена от точки С на расстоянии d (формула (6.14)).Можно доказать, что момент пары динамы равен наименьшему значению главного момента системы сил (Дополнение Д).
Случай 6.  . Это особенный случай - случай уравновешенной системы сил. Рассмотрим его в следующем параграфе.
. Это особенный случай - случай уравновешенной системы сил. Рассмотрим его в следующем параграфе.
Инварианты раздела «Статика»
| Величины, которые не изменяются при определенных превращениях, называются инвариантами относительно данных превращений. |
В разделе «Статика» такими являются величины, которые не зависят от выбора центра приведения.
Первым векторным инвариантом статики является главный вектор системы сил, потому что геометрическая сумма одной и той же системы сил не зависит от точки, в которую переносятся эти силы (тема 4).
Сравним главные моменты системы сил относительно двух центров приведения (точки О1 и точки О2, рис. 6.10). Для этого надо рассмотреть моменты одной из сил системы  (к = 1, 2, …, n) относительно точек. О1 и О2.. Согласно формуле (6.2)
(к = 1, 2, …, n) относительно точек. О1 и О2.. Согласно формуле (6.2)
 ,
,  .
.
 Учитывая, что
Учитывая, что  имеем, умножив левую и правую части этого равенства на ,
имеем, умножив левую и правую части этого равенства на ,
 (6.15)
(6.15)
где  – момент силы , которая при-
– момент силы , которая при-
ложена в точке О2, относительно точки О1 .
Если сложить все левые части и все правые части формул (6.15), приняв k = 1, 2, ..., n, получим формулу (6.16).
 (6.16)
(6.16)
| При изменении центра приведения главный момент системы сил уменьшается на момент главного вектора, который приложен в новом центре приведения относительно старого центра. |
Скалярно умножив векторное равенство (6.16) на главный вектор  и учитывая, что смешанное произведение
и учитывая, что смешанное произведение  , имеем
, имеем
 (6.17)
(6.17)
| Скалярное произведение главного вектора на главный момент не зависит от центра приведения, то есть является вторым инвариантом произвольной системы сил. |
Составим таблицу всех возможных случаев приведения произвольной пространственной системы сил к более простому виду (табл. 6.1).
Таблица 6.1 – Случаи приведения пространственной системы сил к более простому виду
| Номер позиции | Значение | Результат приведения | ||
Главного
вектора

| Главного
момента

| Второго
инварианта

| ||

| 
| 
| Пара сил | |

| 
|
| Равнодействующая в точке О | |
|
|
| 
| Равнодействующая в точке С, 
| |
|
|
| 
| Динама с осью в точке О | |
|
|
| 
| Динама с осью в точке С | |
|
|
|
| Система сил уравновешенная |
Дата добавления: 2016-03-15; просмотров: 2546;