Постановка задачи и выбор методики синтеза САУ
Задача синтеза системы автоматического управления (САУ) заключается в выборе такой ее структуры, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявляемым к системе.
Обычно определенная часть проектируемой системы задана. Она является исходной или нескорректированной САУ. Параметры ее основных функциональных элементов известны. В такой постановке задача проектирования сводится к определению управляющего устройства (УУ), обеспечивающего заданные показатели качества системы.
Для упрощения структуры УУ оно разбивается на ряд корректирующих устройств (КУ) путем организации в САУ внутренних вложенных друг в друга контуров, каждый из которых управляется соответствующим регулирующим устройством (регулятором).
Для расчета внутренних контуров целесообразно использовать методику последовательной коррекции с подчиненным регулированием координат. В её основе лежит настройка внутренних контуров по быстродействию на так называемый модульный оптимум. Последний (главный) контур синтезируется по точности путем настройки на симметричный оптимум. В результате получаются обычно простейшие КУ в виде типовых промышленных регуляторов (ПИД, ПИ и т.д.). Такие регуляторы удобны в настройке и эксплуатации.
В настоящее время при проектировании и исследовании САУ широко используются специальные программно-вычислительные системы. Наиболее применяемой в области автоматики является среда MatLab с рядом своих приложений, в особенности, таких как Control System Toolbox и Simulink. Их использование значительно упрощает все рутинные расчеты и исключает вычислительные ошибки. Поэтому данные пакеты расширения MatLab можно использовать на всех этапах проектирования, где это целесообразно.
Далее рассматривается методика проектирования САУ с применением MATLAB на основе примера синтеза следящего электропривода, исходная схема представлена на рис. 5.1.
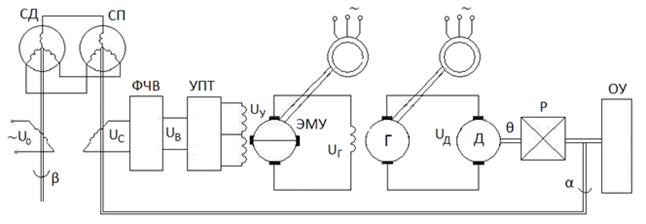
Рис. 5.1. Следящий электропривод на основе системы ЭМУ-Г-Д
В этой схеме обозначено: Д – электродвигатель постоянного тока независимого возбуждения, ЭМУ – электромашинный усилитель, Г – генератор постоянного напряжения, СД – сельсин-датчик, СП – сельсин-приемник, ФЧВ – фазочувствительный выпрямитель, УПТ – усилитель постоянного тока, АД – асинхронный двигатель, Р – редуктор, ОУ – объект управления.
Задающим воздействием в данной системе является угол поворота ротора сельсина-датчика β, регулируемой координатой − угол поворота выходного вала редуктора α, который измеряется сельсином-приемником. Пара СД и СП включены по трансформаторной схеме, которая позволяет формировать сигнал рассогласования (переменное напряжение UС), пропорциональный ошибке слежения  . Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
. Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
Постоянное напряжение UВ усиливается УПТ и подается в прямую и обратную обмотки управления ЭМУ в соответствие со знаком UВ. Электромашинный усилитель выполняет роль усилителя мощности. По существу – это двухкаскадный генератор постоянного напряжения, который приводится в движение от асинхронного двигателя. Последний питается от трехфазной сети и вращается с некоторой постоянной скоростью. Напряжение на выходе электромашинного усилителя UД пропорционально напряжению, подаваемому в обмотку управления UУ. Под действием напряжения UД двигатель вращается с определенной скоростью в прямом или обратном направлении в зависимости от знака UД.
Редуктор Р в следящих системах обычно существенно понижает обороты, т.е. его коэффициент передачи значительно меньше единицы. В данной системе объектом управления по существу является двигатель с редуктором, т.к. обратная связь организована по положению вала Р. Однако с учетом того, что ОУ жестко связан с валом Р можно считать, что объектом управления является система Д - ОУ. Работает САУ следующим образом. Если угол поворота  не изменяется, то α=β и δ=0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигателе Д. Последний начнет вращаться вместе с Р и СП в том же направлении, что и СД. Как только выполнится равенство α=β двигатель Д и редуктор Р остановятся. Если угол β изменять постоянно, то он будет отслеживаться системой с определенной ошибкой δ. Очевидно, чем выше скорость и ускорение входного вала β, тем больше ошибка слежения.
не изменяется, то α=β и δ=0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигателе Д. Последний начнет вращаться вместе с Р и СП в том же направлении, что и СД. Как только выполнится равенство α=β двигатель Д и редуктор Р остановятся. Если угол β изменять постоянно, то он будет отслеживаться системой с определенной ошибкой δ. Очевидно, чем выше скорость и ускорение входного вала β, тем больше ошибка слежения.
Параметры нескорректированного электропривода и требуемые показатели качества представлены в табл. 5.1.
Таблица 5.1
| Наименование данных | Параметры |
| Постоянная времени поперечной цепи ЭМУ, ТК, с | 0,5 |
| Постоянная времени якорной цепи Г и Д, ТЭ, с | 0,08 |
| Постоянная времени обмотки воз-буждения Г, ТГ, с | 0,4 |
| Электромеханическая постоянная времени Д, ТМ, с | 0,3 |
| Постоянная времени обмотки управления ЭМУ, ТУ, с | 0,006 |
| Коэффициент передачи сельсинов KC, в/рад | |
| Коэффициент передачи УПТ, KУ | |
| Коэффициент передачи ЭМУ, KЭ | 5,5 |
| Коэффициент передачи Д, KД, рад/с/В | 1,0 |
| Коэффициент передачи Р, KР | 0,008 |
| Коэффициент передачи ФЧВ, KВ | 0,6 |
| Коэффициент передачи Г, KГ | 1,5 |
| Максимальная скорость Ωм, град/с | |
| Максимальное ускорение εм, град/с2 | |
| Максимальная ошибка eд, угл.мин | |
| Перерегулирование σ, % |
Анализ исходных данных на проектирование и предлагаемого подхода синтеза САУ позволяет выделить следующие основные этапы проектирования:
· построение структурной схемы нескорректированной системы;
· определение показателей качества исходной системы, в том числе, оценка точности, запаса устойчивости и быстродействия;
· синтез внутренних контуров САУ методом последовательной коррекции с подчиненным регулированием координат;
· синтез основного контура регулирования с использованием настройки на симметричный оптимум;
· оценка качества скорректированной системы.
Дата добавления: 2016-01-18; просмотров: 1132;