Расчет контура регулирования напряжения
Структурная схема первого внутреннего контура представлена на рис. 5.6. Здесь  - передаточная функция РН,
- передаточная функция РН,  - ПФ делителя напряжения.
- ПФ делителя напряжения.
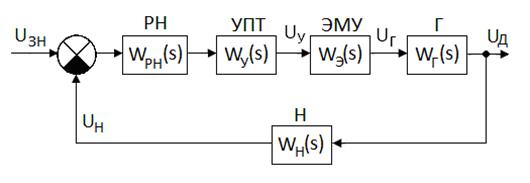
Рис. 5.6. Структурная схема контура регулирования напряжения
В соответствии с методикой подчиненного регулирования координат внутренние контуры настраиваются по быстродействию на так называемый модульный оптимум, которому соответствует желаемая ПФ разомкнутой системы следующего вида
 ,
,
где  – нескомпенсированная постоянная времени.
– нескомпенсированная постоянная времени.
В качестве  берется наименьшая постоянная времени синтезируемого контура, поэтому она часто называется малой постоянной времени. По существу
берется наименьшая постоянная времени синтезируемого контура, поэтому она часто называется малой постоянной времени. По существу  – ПФ реального интегратора. При этом желаемая ПФ замкнутой системы определяется соотношением
– ПФ реального интегратора. При этом желаемая ПФ замкнутой системы определяется соотношением
 ,
,
т.е. представляет собой колебательное звено с незначительным коэффициентом демпфирования  .
.
Такой настройке соответствуют высокие динамические показатели качества - перерегулирование  и длительность переходного процесса
и длительность переходного процесса  достаточно малы
достаточно малы  , а точность приемлема, так как контур обладает астатизмом первого порядка.
, а точность приемлема, так как контур обладает астатизмом первого порядка.
Возьмем в качестве нескомпенсированной постоянной времени постоянную времени обмотки уравнения ЭМУ, т.е. положим  . Тогда желаемая ПФ разомкнутого контура будет иметь следующий вид:
. Тогда желаемая ПФ разомкнутого контура будет иметь следующий вид:
Зададимся значением коэффициента передачи датчика напряжения  , исходя из следующих соображений. Максимальное напряжение цепи обратной связи
, исходя из следующих соображений. Максимальное напряжение цепи обратной связи  , подаваемого на РН, ограничим значением
, подаваемого на РН, ограничим значением  при максимальном значении напряжения генератора
при максимальном значении напряжения генератора  , которое равно максимальному напряжению, подаваемому на электродвигатель. Отсюда будем иметь
, которое равно максимальному напряжению, подаваемому на электродвигатель. Отсюда будем иметь
 .
.
Теперь можно определить ПФ разомкнутого контура  :
:
 .
.
После этого рассчитаем ПФ регулятора напряжения по соотношению
 .
.
В результате получим
 ,
,
где  с – постоянная времени интегрирования РН.
с – постоянная времени интегрирования РН.
Поделив числитель ПФ на ее знаменатель, определим параллельную структуру РН:
 ,
,
где  – коэффициент передачи пропорционального звена;
– коэффициент передачи пропорционального звена;
 с – коэффициент передачи дифференциатора.
с – коэффициент передачи дифференциатора.
Анализ показывает, что РН реализует пропорционально - интегрально - дифференциальный (ПИД) закон управления.
Дата добавления: 2016-01-18; просмотров: 804;