Расчет контура регулирования скорости
Первый контур регулирования является подчиненным второму и входит в канал управления последнего в виде подсистемы (звена). С учетом этого схему контура регулирования скорости для простоты расчетов целесообразно представить в виде структуры, изображенной на рис. 5.7.
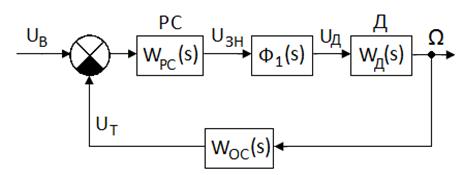
Рис 5.7. Структурная схема контура регулирования скорости
Здесь  – ПФ цепи обратной связи, включающей ТГ и его выходной делитель напряжения. Коэффициент передачи цепи обратной связи равен
– ПФ цепи обратной связи, включающей ТГ и его выходной делитель напряжения. Коэффициент передачи цепи обратной связи равен  .
.
Положим, что при максимальной скорости вращения двигателя  рад/с, напряжение цепи обратной связи не должно превышать максимальное значение
рад/с, напряжение цепи обратной связи не должно превышать максимальное значение  В. Чтобы система не работала в режиме насыщения, возьмем максимальную скорость с запасом
В. Чтобы система не работала в режиме насыщения, возьмем максимальную скорость с запасом  рад/с.
рад/с.
Тогда получим
 в·с/рад.
в·с/рад.
Передаточная функция контура регулирования напряжения  равна
равна
 .
.
Согласно методике коррекции с подчиненным регулированием координат в знаменателе следует пренебречь членом  , т.к. он очень мал. Это приводит к небольшой погрешности при расчете регулятора скорости РС, но существенно упрощает получение его передаточной функции
, т.к. он очень мал. Это приводит к небольшой погрешности при расчете регулятора скорости РС, но существенно упрощает получение его передаточной функции  . Таким образом
. Таким образом
 .
.
Далее, как и для контура напряжения необходимо сформировать ПФ объекта управления для регулятора скорости. Из рис. 5.7 следует, что она равна
 .
.
В качестве малой нескомпенсированной постоянной времени  берется величина
берется величина  , т.е.
, т.е.  с. Тогда желаемая ПФ контура скорости при настройке на модульный оптимум будет иметь следующий вид
с. Тогда желаемая ПФ контура скорости при настройке на модульный оптимум будет иметь следующий вид
 .
.
Далее можно определить ПФ регулятора скорости:
 ,
,
где  с – постоянная времени интегрирования РС.
с – постоянная времени интегрирования РС.
Полученная ПФ регулятора скорости показывает, что РС также, как и РН является ПИД - регулятором:
 ,
,
где  – коэффициент передачи пропорционального звена;
– коэффициент передачи пропорционального звена;
 с – коэффициент передачи дифференциатора.
с – коэффициент передачи дифференциатора.
Дата добавления: 2016-01-18; просмотров: 753;