Синтез основного контура управления. Структурная схема контура положения представлена на рис
Структурная схема контура положения представлена на рис. 5.8. Здесь  – ПФ замкнутого контура скорости, определяемая по методике, которая была использована для расчета ПФ контура напряжения:
– ПФ замкнутого контура скорости, определяемая по методике, которая была использована для расчета ПФ контура напряжения:

где  с – эквивалентная малая постоянная времени.
с – эквивалентная малая постоянная времени.
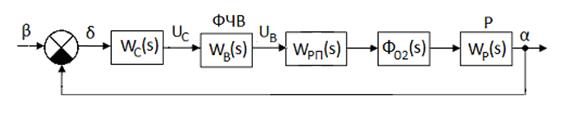
Рис. 5.8. Структурная схема контура положения
Синтез регулятора положения РП будем осуществлять путем настройки на симметричный оптимум, которому соответствует желаемая ПФ следующего вида
 .
.
Определим предварительно ПФ исходного разомкнутого контура положения
 ,
,
где  с-1.
с-1.
Теперь можно определить ПФ регулятора положения:
 ,
,
где  с.
с.
Таким образом, РП реализует пропорционально-интегральный закон управления (ПИ – регулятор):
Исследование скорректированной САУ можно отнести к заключительному этапу. Как и для исходной системы в итоге оцениваются все основные показатели качества, характеризующие точность, запас устойчивости и качество переходного процесса.
Для этого необходимо предварительно определить передаточные функции разомкнутой W(s) и замкнутой Ф(s) скорректированной системы, не упрощая ПФ внутренних контуров регулирования. Указанные операции удобнее осуществлять в среде MATLAB с использованием функций приложения Control System Toolbox. Сначала требуется создать tf-модели всех реализованных регуляторов, а затем уже приступить к преобразованию структурной схемы. При этом следует исследовать каждый контур на запас устойчивости и динамические показатели качества, ибо при реализации регуляторов могли возникнуть неточности в расчетах и даже ошибки.
После получения ПФ разомкнутой W(s) и замкнутой Ф(s) системы можно приступать к оценке качества скорректированной системы по той же методике, как и для исходной САУ.
ЗАКЛЮЧЕНИЕ
Полученные знания и умения по использованию среды MATLAB для решения задач теории автоматического управления позволят студентам и специалистам применять их для проектирования и исследования более сложных систем, чем рассмотренная в последней главе. При этом круг используемых функций и команд может быть расширен за счет ряда дополнительных функций MATLAB. Их можно найти в специальной и справочной литературе по данному пакету [3, 5, 6]. Это касается в первую очередь команд и функций для ss-моделей, которые применяются в методе переменных состояния, являющегося основной современной теории управления.
Освоение предлагаемого материала на уровне практических умений по Control System Toolbox и Simulink открывает путь к изучению более «серьезных» приложений MATLAB, используемых для анализа и синтеза САУ. К ним можно отнести следующие Toolbox:
· Frequency Domain System Identification, предназначенный для идентификации линейных динамических систем по их временным и частотным откликам;
· LMI Control, используемый для решения задач оптимизации с помощью алгоритмов выпуклого и линейного программирования;
· Model Predictive Control, ориентированный на реализацию стратегии предиктивного управления сложными многоканальными процессами при наличии ограничений на переменные состояния и управляющие воздействия;
·  -Analysis and Synthesis, используемый для проектирования устойчивых систем управления с оптимизацией в равномерной норме;
-Analysis and Synthesis, используемый для проектирования устойчивых систем управления с оптимизацией в равномерной норме;
· Robust Control, применяемый для построения и исследования многопараметрических САУ с нестабильными или не полностью определенными параметрами;
· System Identification, который содержит инструменты для получения математической модели динамического объекта на основе наблюдаемых входных и выходных координат системы.
Следует также заметить, что пользователь может создавать свои функции в виде m-файлов и использовать их для решения определенного круга задач. Так собственно и делают опытные специалисты.
Дата добавления: 2016-01-18; просмотров: 890;