Методы определения работоспособности объекта
Работоспособность объекта определяется его состоянием. Для оценки же состояния объекта необходимо заставить его или выполнять свои рабочие функции, или подавать на его входы специальные “тестовые” воздействия. В первом случае будет осуществляться так называемая “проверка функционирования”, а во втором – оценка объекта по специально измеряемым параметрам или характеристикам.
При проверках на функционирование, как правило, отсутствует количественная оценка, т.е. результат такой проверки выражается дуальным суждением – “да” – “нет”.
Во втором случае в качестве контролируемых параметров объекта могут рассматриваться параметры его отдельных элементов, коэффициенты передаточной функции, параметры динамических звеньев объекта и т.д. В качестве контролируемых характеристик могут сопоставляться статические или динамические характеристики диагностируемого и эталонного объектов или их отдельные показатели, такие как передаточный коэффициент (коэффициент усиления), время нарастания или спада выходного сигнала в ответ на скачкообразное входное воздействие, время достижения заданного уровня, период и число колебаний и др. Частотные характеристики могут сравниваться по максимальной амплитуде в полосе пропускания, частотам среза, крутизне среза, ширине полосы пропускания и т.п.
Если в самом общем случае в качестве диагностической модели использовать передаточную функцию, которая в общем случае имеет вид
K(p) = (anpn + an-1pn-1 + … + a0)/ (bmpm + bm-1pm-1 + … + b0), (2.17)
причём n<m
то её можно разложить в цепную дробь:
 (2.18)
(2.18)
При этом частные передаточные функции: K1(p), K2(p), K3(p) и т.д. определяются в результате деления полиномов знаменателя на полиномы числителя

(2.19)
Каждая частная модель K1(p), K2(p) и т.д. может рассматриваться как приближённая модель, а её погрешность из–за отбрасывания остатка в разложении (2.18) может быть оценена на каждом шаге разложения с помощью выражений:
 ;
;
 ; (2.20)
; (2.20)
 и т.д.
и т.д.
Рассмотрим пример. Пусть объект описывается передаточной функцией
 .
.
Разложим передаточную функцию в цепную дробь, сделав три шага, и оценим погрешность разложения на каждом шаге.
Прежде всего преобразуем передаточную функцию к полиномиальному виду

Проведём операции деления полиномов в соответствии с (2.19)
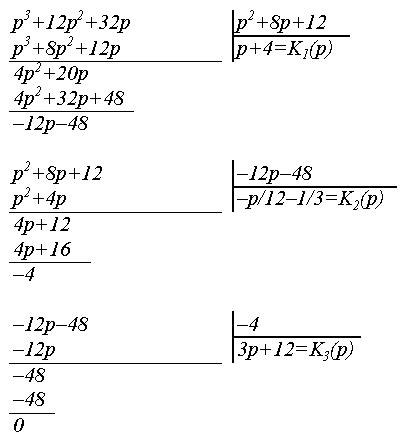 |
Таким образом разложение имеет вид
Подставляя p=jw, определим погрешности:
1) на первом шаге
 .
.
Для нахождения модуля этой погрешности умножим и разделим это выражение на (16–8jw–w2)
 , откуда
, откуда 
и по фазе 
2) на втором шаге
 .
.
Соответственно, её модуль будет
 ,
,
а погрешность по фазе
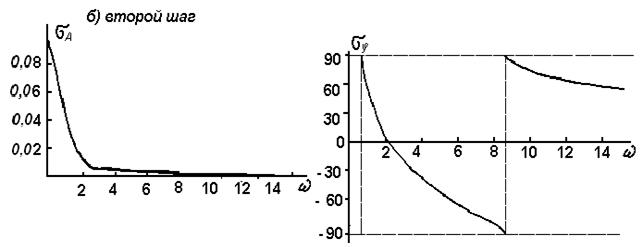
На третьем шаге выражения для погрешностей получаются ещё более громоздкими, поэтому мы их приводить не будем, а для сопоставления величин погрешностей на первом, втором и третьем шагах приведем графики их зависимостей от w (рис. 2.3).
Рис. 2.3. Зависимость погрешностей sА и sj от частоты при разложении передаточной функции в цепную дробь (sА модуль погрешности, sj - погрешность по фазе
Эквивалентная диагностическая модель объекта может быть получена не только из передаточной функции путем ее разложения в цепную дробь, но и по его динамическим характеристикам путем их аппроксимации аналитической функцией с заданной степенью точности.
Например, любую временную функцию на конечном отрезке времени от нуля до Т можно аппроксимировать конечным рядом вида
 , 0£t£T (2.21)
, 0£t£T (2.21)
где fi(t) – аналитические функции, ai– постоянные коэффициенты, которые подбираются с использованием критерия минимума дисперсии методом наименьших квадратов.
Можно строить эквивалентные диагностические и по частотным характеристикам объекта. Причем для этого достаточно аппроксимировать аналитическими функциями только амплитудно-частотную характеристику объекта, т.к. эквивалентность АЧХ в большинстве случаях определяет и эквивалентность фазовых характеристик.
Если для получения диагностической модели использованы временные характеристики, то для оценки работоспособности объекта целесообразно использовать интегральные показатели. Для этого можно рекомендовать функции вида
 (2.22)
(2.22)
где Fi(t) – координаты, характеризующие состояние объекта.
При выборе вида функционала для осуществления интегральной оценки должны соблюдаться требования зависимости J от всех величин, характеризующих состояние объекта.
В частности для получения линейных интегральных оценок можно использовать выражения вида
 , i=0, 1, 2, ..., n, j=0, 1, 2, ..., m (2.23)
, i=0, 1, 2, ..., n, j=0, 1, 2, ..., m (2.23)
при этом y(t)=h(¥) – h(t),
где h(¥) и h(t)–значения контролируемой временной характеристики при t=¥ и текущем значении.
Эти оценки могут быть применены только при апериодичности аппроксимируемых временных характеристиках.
При колебательном характере временной характеристики используются квадратичные интегральные оценки вида
 (2.24)
(2.24)
где Tnm – заданные коэффициенты.
Если объект характеризуется одной величиной y(t) и ее производными, то интегральная квадратичная оценка будет иметь вид
 (2.25)
(2.25)
где k=0, 1, 2, ..., n, i=0 при j=0, i=1 при j=1, 2, ..., n k=1, 2, ..., n представляют собой сумму интегралов от квадрата производных функции y(t):
 (2.26)
(2.26)
причем каждое из слагаемых можно использовать как самостоятельную интегральную оценку. Однако для практики достаточно ограничиться первыми тремя слагаемыми J0,  и
и  , поскольку все следующие слагаемые оказываются очень малыми.
, поскольку все следующие слагаемые оказываются очень малыми.
При выборе тех или иных интегральных оценок для определения работоспособности конкретных объектов следует учитывать их чувствительность к изменению величин, характеризующих состояние объекта.
В качестве примера рассмотрим объект, структурная схема которого представлена на рис. 2.4.
 x(t)
x(t)
Ку К1/p y(t)
Кос(Тосp+1)
Рис. 2.4. Структурная схема объекта
В качестве интегральной оценки его работоспособности примем
 (2.27)
(2.27)
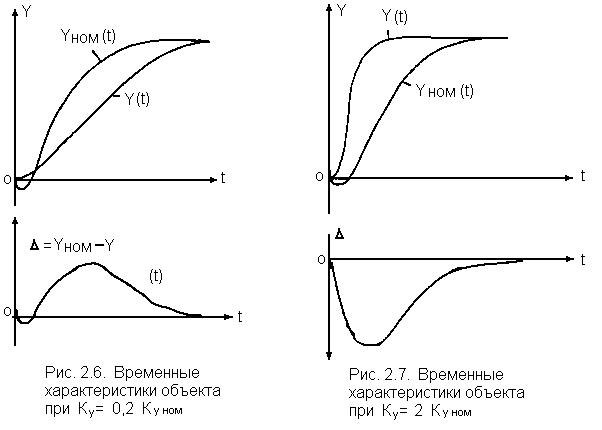
где yном(t), y(t) – временные зависимости выходной величины y эталонного и диагностируемого объекта. Из структурной схемы следует, что состояние объекта характеризуется тремя величинами: Ку, Кос и Тос.
Экспериментально полученные зависимости указанной интегральной оценки при отклонениях каждого из параметров Ку, Кос и Тос от номинальных значений в диапазоне от 0 до ±100% представлены на рис. 2.5. А на рис. 2.6. и 2.7. показаны временные зависимости эталонного и диагностируемого объекта при фиксированных отклонениях только одного параметра Ку (в одном случае Ку=0.2Ку ном в другом Ку=2Ку ном). Из рис. 2.5. видно, что чувствительность интегральной оценки к изменениям параметров Ку и Кос почти одинаковая, но сильно отличается к изменению параметра Тос
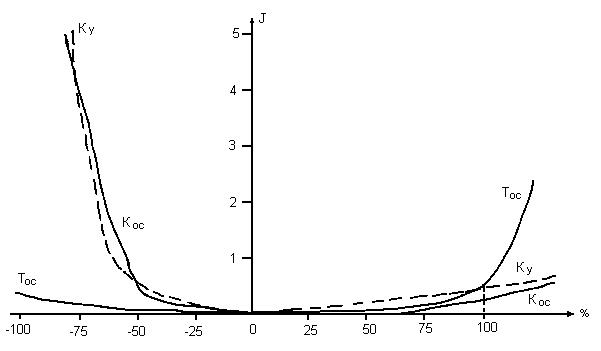
Рис. 2.5. Зависимость интегральной оценки работоспособности объекта от отклонений параметров объекта Ку, Кос и Тос от номинальных значений
Дата добавления: 2017-03-29; просмотров: 1355;