Дифференциальных уравнений
С известной степенью приближения технологическая система может быть линеаризована, если в ней нет существенных нелинейностей, напри-мер зазоров, проскальзываний и др.
При оценке динамических свойств системы в качестве входной величи-ны может рассматривать подачу режущего инструмента.
Для осуществления обработки вала на токарном станке подачу режуще-го инструмента и одну из возможных выходных величин можно отсчиты-вать от одной базы, например от станины станка (рис. 20).


|












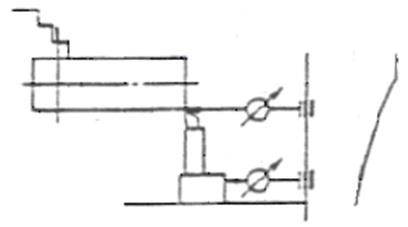
Рис. 20. Механическая модель обработки резанием
на токарном станке
Перемещение суппорта xвх и перемещение вершины резца yвыхотлича-ется на величину прогиба резца y1 под влиянием силы резания, т.е.
 . (1)
. (1)
При этом сила резания F равна
 , (2)
, (2)
 |
где j2 – жесткость резца. Предполагается, что жесткость детали j = .
Сила резания возникает в процессе работы привода подачи станка. Можно записать
 , (3)
, (3)
где Р1 – сила, связанная со скоростью подачи; Р2 – сила, пропорциональная ускорению.
Здесь  ,
,
где С – коэффициент пропорциональности
 , (4)
, (4)
где m – масса суппорта.
С учетом выражений (1) и (2) имеем
 .
.
Обозначим  ;
;  . Получим
. Получим
 . (5)
. (5)
Записанное уравнение (5) представляет собой дифференциальное урав-нение, которое указывает на то, что технологическая система может рас-сматриваться как звено второго порядка.
Качество уравнения зависит от быстродействия системы, продолжи-тельности переходных процессов, зависящей от  , запаса устойчи-вости. Появление в работе скачкообразных перемещений узлов, вибраций заготовки и(или) инструмента и другого свидетельствует о потери устой-чивости.
, запаса устойчи-вости. Появление в работе скачкообразных перемещений узлов, вибраций заготовки и(или) инструмента и другого свидетельствует о потери устой-чивости.
Математическое описание динамики САУ осуществляется путем сос-тавления системы дифференциальных уравнений. Строго говоря, любая реальная динамическая система является нелинейной. Однако в большин-стве случаев описание непрерывных процессов может быть заменено приб-лиженно эквивалентными процессами, которые описывают обыкновенны-ми линейными дифференциальными уравнениями. Такую систему принято называть линеаризованной (рис. 21).













Рис. 21. Графическая интерпретация
процедуры линеаризации
Дата добавления: 2019-04-03; просмотров: 435;