Последовательное соединение
Основы теории автоматического управления
При функционировании любой САУ следует различать два режима: установившийся (равновесное состояние) и режим возмущенного состоя-ния – динамический.
В установившемся режиме согласовывают диапазон изменения коор-динат в элементах системы управления с диапазоном изменения координат объекта управления; определяют коэффициент усиления устройства управ-ления на основе заданной статической точности управления.
Основными этапами исследования систем в динамике являются: поста-новка задачи управления, т.е. формулирование цели и критериев качества управления; математическое описание процессов, протекающих в объектах управления, т.е. определение операторов связи между входной и выходной координатами; синтез структуры устройства управления с определением параметров на основе заданных показателей качества управления; анализ и оценка функционирования системы при заданных условиях.
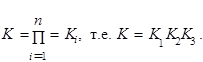
Определение результирующих передаточных коэффициентов.
Соединение звеньев
Если входная и выходная величины звена имеют одинаковую физичес-кую природу, т.е. одинаковые размерности, то коэффициент К размерности не имеет и его называют коэффициентом усиления. При разных размер-ностях входной и выходной величин передаточный коэффициент звена имеет размерность. Примером может служить потенциометрический дат-чик, представляющий собой реостат, включенный по схеме делителя нап-ряжения (рис. 15). Из закона Ома следует Uвых=IRx=URx/R, где I – сила то-ка, протекающего по датчику; Rx – сопротивление введенной части датчи-ка; U – напряжение питания; R – полное сопротивление датчика.
Предположим, что намотка датчика выполнена равномерно и R прово-локи на единицу длины постоянно, тогда Rx /R = x/lили Uвых = Ux /l = Kx, где K = U/l – передаточный коэффициент, В/мм.
Применительно к датчику коэффициент K называют также чувствитель-ностью. Чем больше K, тем больше выходной сигнал звена при таком же изменении входной величины и тем меньше нужно усиливать выходной сигнал до требуемого значения. Перечислим виды соединений звеньев.
|




|

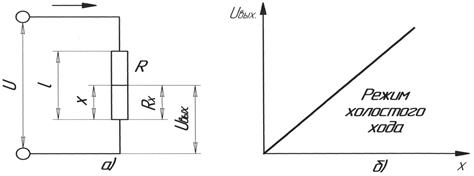
Рис.15. Потенциометрический датчик:
а –функциональная схема; б – статическая характеристика
Последовательное соединение
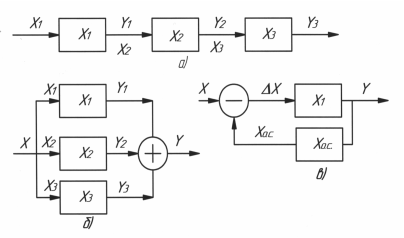
Выход первого звена является входом следующего и т.д. (рис. 16, а). Поэтому передаточный коэффициент системы, состоящей из последова-тельно соединенных звеньев, есть произведение:
|
|
|
|
|
|
|
|
Рис. 16. Соединение звеньев:
а – последовательное; б – параллельное;
в – соединение с обратной связью
Дата добавления: 2019-04-03; просмотров: 439;