Частотные характеристики
Если на входе линейной разомкнутой системы или звена подать гармоническое возмущение х(t) (рис. 23), то по истечении некоторого вре-мени после подачи такого возмущения, когда затухнут все движения, оп-ределяемые переходным процессом, на выходе звена или системы уста-новится также гармоническое изменение выходной величины y с той же частотой ω, которую имеет входная величина, но с иными амплитудой x и смещением фазы на величину φ. Амплитуда и фаза на выходе при прочих 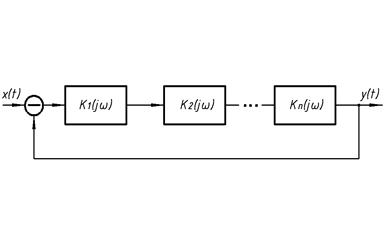 равных условиях будут зависеть от частоты возмущающего воздействия. По этим характеристикам можно судить о динамических свойствах не только звеньев, но и сложных замкнутых САУ.
равных условиях будут зависеть от частоты возмущающего воздействия. По этим характеристикам можно судить о динамических свойствах не только звеньев, но и сложных замкнутых САУ.
 | ||||||||||||||||||
|
|
| ||||||||||||||||
 | ||||||||||||||||||
 |  |  | ||||||||||||||||
 | ||||||||||||||||||
 | ||||||||||||||||||

Рис. 23. Линейная САУ под воздействием гармонического возмущения
Для линейных систем справедлив принцип суперпозиции: реакция сис-темы на несколько одновременно действующих входных воздействий рав-
на сумме реакций на каждое воздействие в отдельности. Это позволяет ог-раничиться изучением систем только с одним входом.
Рассмотрим несколько понятий, связанных с частотными характерис-тиками. Периодическое гармоническое возмущение в векторной форме может быть записано так:  , где
, где  . Последнее выражение представляет собой единичный вектор, у которого cosωt–вещественная часть;sinωt– мнимая часть; X – амплитуда; ωt– фа-зовое состояние процесса.
. Последнее выражение представляет собой единичный вектор, у которого cosωt–вещественная часть;sinωt– мнимая часть; X – амплитуда; ωt– фа-зовое состояние процесса.
По истечении переходного процесса на выходе разомкнутой системы установятся вынужденные периодические колебания, определяемые выра-жением
 .
.
По определению комплексный коэффициент усиления K(jω) получают из передаточной функции W(p)при подстановке в неё вместо p→jω
K(jω)=y(t)/x(t)=Yej(ωt+φ)/Xejωt=K(ω)ejφ.
Здесь K(ω)=Y/Xзависит от частоты так же, как от частоты зависит и величина φ.
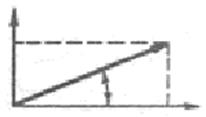
Так как x(t) и y(t) – векторы, то их можно изобразить на комплексной плоскости. Вектор будет изображен в виде отрезка, длина которого равна амплитуде (рис. 24):  , tgφ=Im/Re,где Re – действительная часть; Im – мнимая часть. Таким образом, комплексный коэффициент уси-ления есть векторная величина, модуль которой
, tgφ=Im/Re,где Re – действительная часть; Im – мнимая часть. Таким образом, комплексный коэффициент уси-ления есть векторная величина, модуль которой  , а фа-за
, а фа-за  отсчитывается от действительной оси.
отсчитывается от действительной оси.
При непрерывном изменении частоты происходит изменение модуля и фазы вектора. Конец вектора описывает на комплексной плоскости некото-рую кривую, называемую годографом. Годограф - геометрическое место точек конца вектора комплексного коэффициента усиления на комплекс-ной плоскости при изменении частоты от 0 до ∞. Значение частот отклады-вается непосредственно на годографе, который, таким образом, является амплитудно-фазочастотной характеристикой. Для определения модуля и фазы комплексного коэффициента усиления на заданной частоте следует соответствующую точку годографа соединить прямой с началом коорди-нат. Длина полученного отрезка соответствует в определенном масштабе
модулю, а фаза определяется углом, образованным этой прямой и положи-тельной полуосью действительных величин (рис. 25).
Рис. 24. Характеристики комплексного коэффициента усиления |
        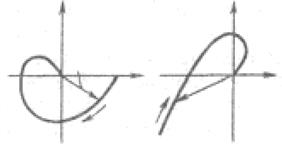 Рис. 25. Примеры годографов разомкнутых САУ
Рис. 25. Примеры годографов разомкнутых САУ
|


При расчетах систем пользуются логарифмической амплитудно-частот-ной (ЛАЧХ) и логарифмической фазочастотной (ЛФЧХ) характеристика-ми. По горизонтальной оси откладывают частоту в логарифмическом мас-штабе, что позволяет изобразить на заданном отрезке значительный диапа-зон частот. Это наиболее удобная форма представления частотных харак-теристик для решения задач анализа и синтеза систем. Рассмотрим амп-литудно-фазовую характеристику  . Прологарифмируем ее: lnK(jω) = lnK(ω)+jφ(ω). На практике используют десятичные логариф-мы lgK(jω) = lgK(ω)+j
. Прологарифмируем ее: lnK(jω) = lnK(ω)+jφ(ω). На практике используют десятичные логариф-мы lgK(jω) = lgK(ω)+j  , так как lnN = lgN/lge = lgN/0,4329=2,3lg N.
, так как lnN = lgN/lge = lgN/0,4329=2,3lg N.
Рассмотрим координатную систему для такого представления (рис. 26). По оси абсцисс откладываем величину lg ω. Вводим две единицы измере-ния: декаду, октаву. Декада – длина отрезка по оси абсцисс, соответствую-щая десятикратному изменению частоты. Число декад nд = lgωв/ωн , где ωв – крайняя высокая частота рассматриваемого диапазона; ωн– крайняя нижняя частота.
 | |||
| | |||










Рис. 26. Координатная система для построения
ЛАЧХ и ЛФЧХ
Например частотный диапазон от ωн=1 с-1 до ωв=10000 с-1 содержит че-тыре декады, так как lg 104 = 4. Первая декада – от 1 до 10 с-1; вторая – от
10 до 100 с-1; третья – от 100 до 1000 с-1 и т.д. Октава – длина отрезка по оси абсцисс, соответствующая двухкратному изменению частоты. В одной декаде содержится 3,32 октавы. Декадный интервал применяют чаще.
Фазу обычно откладывают по оси ординат в угловых градусах или в ра-дианах. Ординатой амплитудно-частотной характеристики является не величина lgK(ω), а пропорциональная ей величина L(ω), в децибелах, L(ω) = 20lgK(ω)(шкала равномерная). Точка пересечения с осью абсцисс соответствует K(ω) = 1.
Использование логарифмического масштаба при построении ЛАЧХ обусловлено не столько значительными изменениями модуля комплексно-го коэффициента усиления, сколько возможностью осуществления графи-ческих методов расчета. При расчетах САУ часто приходится иметь дело с произведением коэффициентов усиления, а так как логарифм произведе-ния равен сумме логарифмов, то при графических расчетах для получения произведения нескольких значений весьма удобно осуществить сложение их логарифмов. Удобство логарифмического масштаба по оси ординат в том, что на одном графике можно представить значения, отличающиеся на несколько порядков.
Временные характеристики
Они – важные характеристики САУ. Это переходные и импульсные переходные функции и их графики. В реальных условиях входные сигналы могут иметь произвольный характер. Для исследования динамических свойств элементов и систем следует выбрать такие типовые возмущения, которые по возможности близко отражали бы наиболее существенные осо-бенности реальных возмущений.
В теории САУ для определения динамических свойств звеньев (систе-мы) в качестве входного сигнала применяют следующие типовые функции (рис. 27): единичный скачок (ступенчатая функция (рис. 27, а), например подключение напряжения к звену или системе, начало обработки на стан-ке, возмущения в виде ударов в механических системах и др.); единичный импульс (рис. 27, б) (как правило, шумы, помехи); гармонический сигнал (рис. 27, в); степенные функции времени (линейные, квадратичные и др.) (рис. 27, г).
Переходная функция системы (звена) – функция, описывающая измене-ние выходной величины системы (звена), когда на ее вход подается еди-ничное ступенчатое воздействие при нулевых начальных условиях. Пере-ходную функцию обычно обозначают как h(t). Иначе, переходная функция
h(t) – функция, описывающая реакцию системы (звена) на единичное сту-пенчатое воздействие при нулевых начальных условиях. График переход-ной функции называют переходной характеристикой.





|
|
|
|
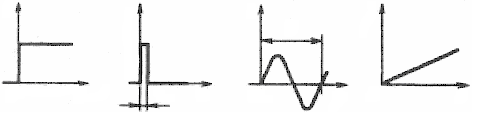
Рис. 27. Типовые функции входного сигнала
Импульсная переходная функция системы (звена) – функция, описываю-щая реакцию системы (звена) на единичное импульсное воздействие при нулевых начальных условиях. График импульсной переходной функции называют импульсной переходной характеристикой.
Физически единичный импульс можно представить как очень узкий им-пульс единичной площади.
Переходную функцию принято вписывать в прямоугольник, изобража-ющий звено.
Дата добавления: 2019-04-03; просмотров: 510;