Использование передаточных функций
В общем виде дифференциальное уравнение звена САУ имеет вид:
 (6)
(6)
где y – выходная величина (в отклонениях от состояния равновесия); x – выходная величина звена (в отклонениях от состояния равновесия); an, an-1,…, a1, a0, bm,bm-1,…, b1, b0 – постоянные коэффициенты, определяемые конструктивными особенностями и параметрами звена.
Так как аналитическое решение дифференциального уравнения в общем случае является трудоемкой задачей, то в современной теории управления широко используют средства описания динамических свойств системы че-рез преобразование Лапласа, что удобнее для практического применения.
Основанием для преобразования служит то обстоятельство, что оно су-щественно облегчает исследование сложных систем, при замене диффе-ренциальных уравнений алгебраическими. В частности, при решении диф-ференциальных уравнений систем преобразование Лапласа позволяет лег-ко учитывать начальные условия и избежать сложных выкладок, связан-ных с вычислением постоянных интегрирования.
Если в уравнение (6), содержащие функции времени y(t) и x(t), ввести функции y(p) и x(p) комплексного переменного p, поставив условие, что эти функции связаны зависимостями
 ,
,  , (7)
, (7)
то оказывается, что дифференциальное уравнение, содержащее функции y(t)и x(t), равносильно линейному алгебраическому уравнению, содержа-щему функции y(p) иx(p) :
 (8)
(8)
Такой переход от дифференциального уравнения к однозначно соответ-ствующему ему алгебраическому уравнению называют преобразованием Лапласа, интеграл (7) – интегралом Лапласа, комплексное переменное p – оператором. Сообразно с этим алгебраическое уравнение (8) является за-писью исходного дифференциального уравнения (6) в операторной форме.
Функцию y(p)называют изображением функции y(t), а функцию y(t) –оригиналом функции y(p). Операция перехода от исходной функции y(t) к ее изображению y(p) (нахождение изображения по оригиналу) называют прямым преобразованием Лапласа. Математически прямое преобразование Лапласа записывают условно с помощью символа L[y(t)] = y(p). Операцию перехода от изображения y(p) к искомой функции y(t) (нахождение ориги-нала по изображению) называют обратным преобразованием Лапласа. Ма-тематически обратное преобразование Лапласа записывается с помощью символа L-1[y(p)] = y(t). Практически переход от дифференциального урав-нения к алгебраическому происходит без каких-либо вычислений.
Если сравнить уравнения (1) и (3), то нетрудно заметить, что формально переход дифференциального уравнения к алгебраическому операторному уравнению при нулевых начальных условиях получают путем замены сим-
волов дифференцирования оригиналов функций 
 ,…,
,…,  соответственно символами pn, pn-1,…, p и функций y(t)– их изображе-ниями y(p).С оператором p можно, как и с другими членами алгебраичес-кого уравнения, производить различные действия (умножение, деление, вынесение за скобки и т.д.). Возможность записи дифференциального уравнения в операторной алгебраической форме значительно упрощает все расчеты.
соответственно символами pn, pn-1,…, p и функций y(t)– их изображе-ниями y(p).С оператором p можно, как и с другими членами алгебраичес-кого уравнения, производить различные действия (умножение, деление, вынесение за скобки и т.д.). Возможность записи дифференциального уравнения в операторной алгебраической форме значительно упрощает все расчеты.
Каждое звено САУ в общем случае описывают дифференциальным уравнением вида (6). Следовательно, при вводе дифференциального урав-нения системы в целом необходимо совместно решить несколько диффе-ренциальных уравнений высших порядков. Запись дифференциального уравнения в операторной форме позволяет свести задачу к решению сис-темы алгебраических уравнений. Определив из алгебраических уравнений изображение y(p)искомой функции y(t), определяющей переходный про-цесс в системе, находим эту функцию, пользуясь таблицами формул изоб-ражений функций, или графическим путем. Кроме того, запись дифферен-циальных уравнений звеньев системы в операторной форме дает возмож-ность ввести удобное понятие передаточной функции, характеризующей звено системы. С помощью передаточных функций расчет САУ еще более упрощается и становится доступным широкому кругу инженеров, без не-обходимости применения сложного математического аппарата.
Вынесем в уравнении (8) y(p) и x(p) за скобки и получим
(anpn+an-1pn-1+…+a1p+a0)y(p)=(bmpm+bm-1pm-1+…+b1p+b0)x(p).
Определим из уравнения (4) отношение изображения выходной вели-чины к изображению входной
.
Отношение W(p)изображения выходной величины системы к изобра-жению его входной величины называют передаточной функцией системы. Соответственно отношение изображения выходной величины звена к изоб-ражению его входной величины называют передаточной функцией звена. Передаточная функция W(p) является дробно-рациональной функцией опе-ратора p:
W(p)=Q(p)/P(p),
где P(p) = anpn + an-1pn-1 +…+ a1p + a0 – оператор левой части дифференци-ального уравнения; Q(p) =bmpm + bm-1pm-1 +…+ b1p + b0 – оператор правой части уравнения.
Из уравнения (2) следует, что передаточная функция звена системы W(p) и изображение его выходной величины определяют изображение вы-ходной величины y(p)=W(p)x(p).
При рассмотрении типовых динамических звеньев часто встречаются функциональные зависимости, приведенные на рис. 22.
 |  |



















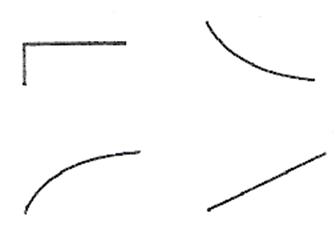
Рис. 22. Типовые функциональные зависимости:
а – единичная функция; б – экспонента вида  ;
;
в – экспонента вида (1– ); г – непрерывно
возрастающая функция
Определим лапласово изображение единой функции x(t) = 1:
 .
.
Изображение экспоненты вида x(t) = e-t/T:
 .
.
Изображение экспоненты вида x(t)=1-e-t/T:

 .
.
Изображение непрерывно возрастающей функции x(t)=Kt:
 .
.
Дата добавления: 2019-04-03; просмотров: 994;