Электромеханический привод (электропривод)
Хотя он распространен еще меньше, чем пневмо-и гидропривод, но наиболее перспективен для ПР. Преимущества: легкость регулирования частоты вращения выходного вала, отсутствие трубопроводов, простота монтажа и наладки, высокие показатели надежности в работе, удобство управления, высокий КПД (0,5 - 0,7), простота подвода электроэнергии, быстродействие, удобство стыковки с другим оборудованием, простота унификации. Но ему присущи и недостатки: низкий показатель мощности на единицу собственной массы, что является сдерживающим моментом в использовании его в робототехнике.
В мировой практике роботостроения происходит постепенное перераспределение доли электромеханических и гидравлических ПР в общем их парке.
Неудовлетворительные эксплуатационные характеристики гидроприводов привели в последние годы к постепенному вытеснению их регулируемый электромеханическим приводом.
Функциональная схема электропривода промышленного робота показана на рисунке 2.
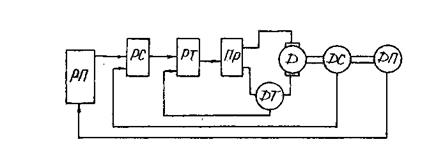
Рисунок 2 - Общая функциональная схема электропривода
РП, РРС, РТ - соответственно регуляторы положения, скорости, тока;
П - преобразователь; Д - двигатель; ДТ, ДС, ДП - соответственно датчики тока, скорости положения.
Характеристика электропривода определяется в первую очередь, типом используемых электродвигателей и усилителя мощности. В приводах ПР чаще всего встречаются коллекторные двигатели постоянного тока независимого возбуждения. В последнее десятилетие специально для роботов создано большое число типов и видов новых электродвигателей с улучшенными характеристиками: малоинерционные, высокомоментные, относительно низкооборотные.
Шаговые электродвигатели, управляемые последовательностью импульсов (каждому импульсу соответствует поворот ротора на определенный угол в несколько градусов) получили широкое распространение в робототехнике. Общий способ получения дискретных шагов заключается в дискретном изменении магнитного поля в зазоре двигателя. На статоре разметаются катушки многофазной обмотки, на которые подаются прямоугольные или ступенчатые импульсы напряжения. При периодических переключениях обмоток направление магнитодвижущей силы статора изменяется на определенный угол (шаг), вызывая поворот ротора на этот же шаг.
Наиболее часто встречается шаговый привод двух разновидностей:
- привод с управляющим шаговым двигателем и промежуточным усилителем момента, выполненным в виде следящей гидравлической системы;
- привод с силовым шаговым двигателем, соединенным с исполнительным механизмом через механическую передачу.
Шаговый электропривод конструктивно выполняется в виде блока, встраиваемого либо в устройство программного управления (например, УПМ—331, ИЭС-690), либо в основание промышленного робота (РОБКО-1).
Важным требованием к электропривода ПР является надежная фиксация механизма в случае аварийного обесточивания,- .для чего в составе приводе необходимо предусмотреть электромагнитный тормоз.
Лекция 8
Дата добавления: 2016-10-17; просмотров: 3202;