А) одно судно, уступающее дорогу, должно в соответствии с Правилом 16 предпринять заблаговременное и решительное действие с
тем, чтобы чисто разойтись с другим судном; согласно требованиям Правила 8, это действие должно быть уверенным, своевременным, достаточно большим, чтобы оно могло быть легко обнаруженным и не должно приводить к опасному сближению с другими судами;
б) другое судно, которому уступают дорогу (рис. 18.4), должно сохранять курс и скорость;
может предпринять действие, чтобы избежать столкновения только собственным маневром, если для него становится очевидным, что судно, обязанное уступить дорогу, не предпринимает соответствующего действия (при этом оно, если позволяют обстоятельства, не должно поворачйвать влево, если уступающее дорогу судно находится слева от него);
должно предпринять такое действие, которое наилучшим образом поможет предотвратить столкновение, когда обнаруживает, что оно находится настолько близко, что столкновение нельзя избежать только действиями судна, уступающего дорогу.
Судно, которому уступают дорогу, предпринимая разрешенный или предписанный Правилом 17 маневр, должно учитывать, что уступающее дорогу судно может в любой момент сманеврировать. Поэтому предпочтительны такие маневры, которые либо не противоречили бы возможному маневру уступающего дорогу судна, либо были настолько значительны, чтобы перекрыть даже его неблагоприятный маневр.
Таким образом, если для каждой ситуации определить, какое из двух судов должно уступить дорогу, то обязанности каждого из судов будут четко обозначены и вероятность несогласованных действий становится минимальной.
 Обгон. В первую очередь уступающее дорогу судно определено для ситуации обгона — обгоняющее судно должно сторониться пути обгоняемого (Правило 13). Судно считается обгоняющим другое судно, когда оно подходит к нему с направления более 22,5° позади тра-
Обгон. В первую очередь уступающее дорогу судно определено для ситуации обгона — обгоняющее судно должно сторониться пути обгоняемого (Правило 13). Судно считается обгоняющим другое судно, когда оно подходит к нему с направления более 22,5° позади тра-
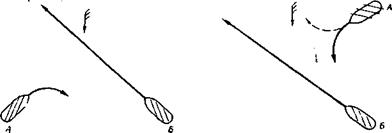
Рис. 18.4. Последовательное изменение обязанностей судна £, которому уступают дорогу:



 / — суда находятся на большой дистанции, опасности столкновения нет, оба судиа свободны в своих действиях; // — возникает опасность столкновения, судно Б должно сохранять курс и скорость; /// —■ становится очевидным, что обязанное уступить дорогу судно А не предпринимает соответствующего действия; судно Б может предпринять действия, чтобы избежать столкновения только собственным маневром; оно должно подать звуковой* сигнал в соответствии с Правилом 34; /V — суда находятся настолько близко, что столкновения нельзя избежать только действием судна А, судно Б должно предпринять такие действия, которые наилуч- шим образом помогают предотвратить столкновение
/ — суда находятся на большой дистанции, опасности столкновения нет, оба судиа свободны в своих действиях; // — возникает опасность столкновения, судно Б должно сохранять курс и скорость; /// —■ становится очевидным, что обязанное уступить дорогу судно А не предпринимает соответствующего действия; судно Б может предпринять действия, чтобы избежать столкновения только собственным маневром; оно должно подать звуковой* сигнал в соответствии с Правилом 34; /V — суда находятся настолько близко, что столкновения нельзя избежать только действием судна А, судно Б должно предпринять такие действия, которые наилуч- шим образом помогают предотвратить столкновение
верза. В ситуации, показанной на рис. 18.5, судно Б должно уступить дорогу судну А.
Правило 13 «Обгон» обладает приоритетом по отношению к остальным правилам плавания и маневрирования. Оно действует независимо от предписаний других правил разделов I и II части В. Какие бы ни были взаимные обязанности судов, обгоняющее судно всегда уступает дорогу обгоняемому. В ситуации на рис. 18.6 парусное судно Б, в любой другой ситуации пользующееся преимуществом прохода, должно уступить дорогу обгоняемому судну с механическим двигателем А. Если имеются сомнения, является ли судно обгоняющим, то следует считать, что это именно так, и действовать соответствующе.
Требование к обгоняющему судну уступить дорогу не связывается с возникновением опасности столкновения. Даже если пеленг заметно изменяется и опасности столкновения нет (рис. 18.7), обгоняющее судно Б должно уступить дорогу судну А. Никакое последовавшее изменение во взаимном положении судов не снимает с него этой обязанности. В ситуации, показанной на рис. 18.7, судно Б не вправе поворачивать влево до тех пор, пока судно А «не будет окончательно пройдено и оставлено позади», т. е. до тех пор, пока этот поворот может создавать препятствия безопасному движению судна А.
Некоторыми специалистами высказывается мнение, что требования Правила 17 не распространяются на обгоняемое судно. Это мнение основывается на том, что в официальном русском переводе не говорится, что обгоняющее судно «уступает дорогу». Правило 13 «Обгон» требует от обгоняющего судна «держаться в стороне от пути обгоняемого судна», а Правило 17 относится к судну, «которому уступают дорогу». Однако история развития Правила 13 и сопоставление с английским оригиналом не подтверждают этого мнения. Правило 13 сохранило
практически неизменными требования Правила 24 ППС£-6Й, в котб ром содержится требование «уступить дорогу». В английском оригинале Правила 13 употребляется то же выражение «shall keep out of the way», что и в остальных правилах плавания и маневрирования, которое во всех остальных Правилах переведено как «должно уступить дорогу». Исходя из этого действия обгоняемого судна должны определяться положениями Правила 17 и, следовательно, ему надлежит сохранять в ситуации обгона свои курс и скорость, чтобы не затруднять действия обгоняющего судна.
В то# же время, если обгоняемое судно подходит к изгибу фарватера, новому рекомендованному курсу, то обгоняющее судно в соответствии с обычной морской практикой и обстоятельствами данного случая не должно препятствовать повороту обгоняемого судна. В этом случае в соответствии с Правилом 2(6) поворот обгоняемого судна следует рассматривать как вынужденное и оправданное отступление ог Правила 17(a) (i).
Взаимные обязанности судов. Правило 18 следующим образом распределяет все суда по категориям в порядке ухудшения их маневренных возможностей: 1) судно с механическим двигателем; 2) парусное судно; 3) судно, занятое ловом рыбы; 4) судно, ограниченное в возможности маневрировать, и судно, лишенное возможности управляться. Если между собой встречаются суда разных категорий, то судно, имеющее по этой градации лучшие маневренные возможности, должно уступить дорогу. При этом, как и п Правиле 13, опасность столкновения не является обязательным условием действия Правила 18.
Парусные суда. Распределение обязанностей между двумя опасно сближающимися парусными судами производится в зависимости or галса и курса относительно ветра. В ситуации на рис. 18.8 судно А, идущее левым галсом, должно уступить дорогу судну Б, идущему правым галсом. В ситуации на рис. 18.9 оба судна идут одним галсом (в данном случае — правым). Находящееся на ветре судно А должно уступить дорогу судну Б, находящемуся под ветром.
Суда с механическими двигателями. В общем случае (за исключением обгона), если возникает опасность столкновения между двумя судами на ходу, то судно, которое наблюдает другое судно на своей правой стороне, должно уступить дорогу. При этом оно должно, если позволяют обстоятельства, избегать пересечения курса другого судна у него по носу. В ситуации на рис. 18.10 судно А уступает дорогу и действует в соответствии с Правилами 15, 16, 8, а судно Б — в соот-
|
| Рие. 18.8. Расхождение парусных сулоя, идущих разными галсами |
| Рис. 18.9. Расхождение парусных су дов, идущих одинаковыми галсами |
ветствии с Правилом 17. Если судно Б будет предпринимать маневр,5 который оно может делать в соответствии с Правилом 17 (а) (и), то* этот маневр должен отвечать требованиям Правил 8 и 17(c). Пра-^ вило 15 действует независимо от того, имеет ли судно с механическим, двигателем А ход относительно воды или нет.
При сближении противоположными или почти противоположными курсами (рис. 18.11) каждое судно должно изменить свой курс вправо с тем, чтобы каждое судно прошло у другого по левому борту. В данной ситуации нет судна, уступающего дорогу, и соответственно! нет судна, которое в течение какого-то времени было обязано сохранять курс и скорость.
Пограничные ситуации. Во всех случаях, когда возможна двойственная трактовка ситуации, по смыслу Правил и в соответствии с хорошей морской практикой («считай себя ближе к опасности*) следует считать существующей такую ситуацию, которая требует активных действий своего судна.
В ситуации на рис. 18.12, пограничной между ситуацией пересечения курсов и ситуацией противоположных курсов, судно Б, сомневаясь в трактовке ситуации, должно считать существующей ситуацию сближения почти противоположными курсами и действовать соответственно. В данном случае при выполнении Правил любая трактовка не приведет к обострению ситуации.
Более опасна пограничная ситуация на рис. 18.13 между ситуацией пересечения курсов и обгоном. Для того чтобы ситуация разрешилась безопасно, необходимо, чтобы судно Б в случае сомнения считало существующей ситуацию обгона, а судно А в случае сомнения — ситуацию пересечения курсов.
Наиболее опасный случай сближения судов на встречных курсах возникает, когда суда расходятся первоначально в малой дистанции правыми бортами (рис. 18.14). Каждое из судов в зависимости от субъективной оценки степени опасности такой дистанции может либо не предпринимать действий, либо изменить свой курс вправо. И то и другое решение не противоречит Правилу 14. Если судоводитель считает дистанцию расхождения небезопасной, наиболее приемлемым действием является заблаговременный и решительный поворот вправо
 |  |

 |  |


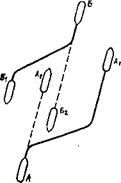 Рис. 18.14. Возможные действия при двойственной трактовке ситуации (Правило 14):
Рис. 18.14. Возможные действия при двойственной трактовке ситуации (Правило 14):
|
 А\, Б, — суда А и Б считают первоначальную дистанцию расхождения опасной и изменяют свои курсы вправо; /1* и Б2 — суда А и Б считают, что опасности столкновения нет, и не предпринимают никаких действий
А\, Б, — суда А и Б считают первоначальную дистанцию расхождения опасной и изменяют свои курсы вправо; /1* и Б2 — суда А и Б считают, что опасности столкновения нет, и не предпринимают никаких действий
 | |


с тем, чтобы у другого судна не оставалось сомнений в оценке ситуации встречным судном и чтобы маневр не был принят за случайное рыскание на курсе. Наиболее опасным действием в этом случае, являющимся прямым нарушением Правил и неоднократно приводившим к столкновениям, является поворот одного из судов влево с целью увеличения дистанции расхождения правыми бортами (рис*. 18.15). Такой маневр судна А в случае поворота судна Б вправо компенсирует его действия и может привести к столкновению.
При опасном сближении друг с другом нескольких судов возникают противоречия между обязанностями по отношению к различным судам. Так, в ситуации на рис. 18.16 каждое из судов является уступающим дорогу для судна справа и одновременно судном, которому уступают дорогу, для находящегося слева. Отступая на основании Правила 2(b) от одной из своих обязанностей, каждое судно в этом случае должно маневрировать, например, изменить курс вправо.
Особенности расхождения в узкостях и системах разделения движения. Плавание в узкостях и по системам разделения движения не освобождает суда от выполнения соответствующих Правил плавания и маневрирования, но вносит некоторые особенности во взаимные обязанности судов. Это в первую очередь касается расхождения с судном, которое, согласно Правилу 9 (Ь, с, d) или Правилу 10 (/, /)> «пе должно затруднять движением К этой категории судов относятся:
суда менее 20 м, парусные суда и суд?, занятые ловом рыбы, по отношению к судам, идущим по фарватеру или в полосе движения;
любые суда, пересекающие узкий проход или фарватер, по отношению к судну, которое может следовать только в пределах такого прохода или фарватера.
Взаимные обязанности судов в этом случае можно рассмотреть на примере ситуации, показанной на рис. 18.17. Судно А может следовать только в пределах фарватера. Судно Б не должно затруднять его движение и должно предпринять заблаговременные действия с тем, чтобы оставить достаточное водное пространство для безопасного прохода судна А. Если судно А испытывает сомнения в отношении намерений судна Б, оно может подать сигнал, предписанный Правилом 34 (d)% не менее пяти коротких и частых звуков свистком. Однако если возникает опасность столкновения, то в соответствии с Правилом 15 судно А должно уступить дорогу, предприняв своевременный и решительный маневр (Правила 16 и 8). В данных условиях это будет, как
правило, резкое сбавление хода. При этом судно £> не освобождается от обязанности не затруднять движение судна А и должно, предпринимая свои действия, учитывать возможные действия судна А.
В узком проходе или на фарватере обгон зачастую может быть совершен только при условии, что обгоняемое судно предпримет действия, позволяющие безопасный проход. В этом случае обгоняющее судно должно указать свои намерения, подав соответствующий звуковой сигнал (два продолжительных и один короткий или два продолжительных и два коротких). Обгоняемое судно в ответ подает сигнал ЧАРЛИ и предпринимает действия, способствующие обгону, либо подает серию не менее пяти коротких звуков, выражая сомнения в возможности безопасного обгона.
Если при плавании в узкостях или по системам разделения движения обгоняемым является судно длиной менее 20 м или парусное судно или судно, занятое ловом рыбы, которое в общем случае согласно Правилам 9 и 10 не должно затруднять движение другого судна, то для ситуации обгона указанное требование не действует и в соответствии с Правилом 13 обгоняющее судно должно держаться в стороне от пути этих судов, т. е. уступать им дорогу. Обгон должен выполняться при условии его безопасности, а если это необходимо, то судно, желающее совершить обгон, должно согласно Правилу 9(e) запросить содействия у обгоняемого судна.
Особенностью расхождения в узкостях и в системах разделения движения являются более частые, чем в открытом море, маневры изменением скорости. Это связано как с навигационными ограничениями, так и с ограничениями, налагаемыми Правилом 10(c): «...если судно вынуждено пересекать полосу движения, оно должно делать это, насколько возможно, курсом, перпендикулярным общему направлению движения потока». Обычная морская практика предъявляет в этих условиях повышенные требования к готовности машин к маневру и к своевременности маневра, так как маневры изменением скорости требуют больше времени на их выполнение и обычно медленнее изменяют ситуацию, чем маневры изменением курса.
Контрольные вопросы. 1. От каких факторов зависит статистически вероятность столкновений судов на виду друг у друга? 2. Как определить, развивается ли ситуация чрезмерного сближения и существует ли опасность столкновения? 3. Какие разделы правил плавания и маневрирования МППСС-72 действуют при плавании судов на виду друг у друга? 4. Каковы взаимные обязанности судов при расхождении в различных типовых ситуациях? 5. Какие особенности имеет расхождение судов в узкости?
Глава 19. РАСХОЖДЕНИЕ СУДОВ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ х19.1. Статистика столкновений
Почти две трети (68,4 %) столкновений судов мирового морского флота приходятся на условия ограниченной видимости. Эти столкновения следующим образом распределяются (%) в зависимости от курсового угла (градусы) сближения:
Курсовые углы Частота
столкновения
Менее 5 28,5
От 5 до 30 58,9
От 30 до 112,5 8,5
Более 112,5 . 4,1
 В условиях ограниченной видимости происходит 46,2 % стол к.'* вений судов Минморфлота. Эти столкновения следующим образом р пределяются в зависимости от курсового угла (градусы) сближения ( от общего числа столкновений в условиях ограниченной видимост *
В условиях ограниченной видимости происходит 46,2 % стол к.'* вений судов Минморфлота. Эти столкновения следующим образом р пределяются в зависимости от курсового угла (градусы) сближения ( от общего числа столкновений в условиях ограниченной видимост *
Узкость Итого
60,0 . . . 76,4
6.7 .. . 10,2
6.7 .. . 6,7 0,0 .. . 6,7
Причинами этих столкновений стали следующие нарушения Пр4 вил и ошибки судоводителей (% от общего числа столкновений):
72.9
25.9 28,2 18,8 64,7
42.9
38.9 52,0 14,!
В приводимых основных причинах столкновений сумма превышает 100 %, так как при столкновении может быть одновременно несколько основных нарушений.
19.2. Радиолокационное наблюдение
Среди действий, которые должны выполнить вахтенный помощник капитана при ухудшении видимости или при подходе к зоне ограниченной видимости, одним из важнейших является организация надлежащего визуального, слухового и радиолокационного наблюдения. Визуальное и слуховое наблюдение обеспечивается выставлением в достаточно удаленном от своих ходовых огней и судового шума месте проинструктированного впередсмотрящего, имеющего надежную связь с мостиком. Надлежащее радиолокационное наблюдение является основой и главным резервом повышения безопасности расхождения судов в условиях ограниченной видимости. Как видно из приведенных выше статистических данных, в 73 % столкновений судов в условиях ограниченной видимости было запоздалое радиолокационное обнаружение или необнаружение цели по РЛС. Своевременное обнаружение цели обеспечивается правильной настройкой исправного индикатора РЛС, надлежащей организацией радиолокационного наблюдения и высокой ответственностью судоводителя за доверенные ему человеческие жизни, судно и груз.
Настройка РЛС. При выведенном усилении яркость экрана делают такой, чтобы линия развертки стала слегка заметной. Вводят изображение неподвижных колец дальности и фокусировкой делают их возможно более тонкими, затем вводят усиление. Лучшее положение
ручки «Усиление» такое, при котором по всей площади экрана появляется слабый мерцающий фон шумов приемника. Такое положение соответствует максимальной чувствительности приемника и позволяет обнаруживать объекты на максимальной дальности. Недостаточное усиление может привести к потере обнаружения небольших объектов, дающих слабые эхо-сигналы. Судоводители часто практикуют уменьшение усиления для выделения сильных эхо-сигналов. Делать это можно ненадолго, каждый раз восстанавливая нормальное усиление. Это же относится к периодам уменьшения усиления при просмотре части экрана, замаскированной засветкой от сильных осадков. Следует следить за яркостью изображения. Слабая яркость затрудняет наблюдение, а чрезмерная — вызывает расфокусирование изображения. При переключении шкал дальности яркость необходимо подстраивать.
Уменьшение влияния помех. При наличии засветки от морских волн применяются временная автоматическая регулировка усиления (ВАРУ) или другие устройства устранения помех от волн. Область сплошной засветки уменьшают до нескольких флюктуирующих точек, на фоне которых можно выделить эхо-сигналы от объектов. Следует помнить, что одновременно с подавлением сигналов от волн подавляются и сигналы от малых объектов. Интенсивность помех от волнения уменьшается при использовании импульсов меньшей длительности, которые обычно применяются на шкалах более крупного масштаба. Поэтому бывает целесообразным переход на использование шкалы с меньшей дальностью, если при этом сокращается длительность импульса. Потеря дальности наблюдения может быть возмещена сдвигом начала развертки, если это обеспечивается РЛС. При наличии помех от осадков рекомендуется использование помехозащитного устройства при одновременном увеличении усиления. Для большего ослабления помех от осадков целесообразно использование диапазона 10 см и импульсов меньшей длительности.
Ложные сигналы из-за боковых лепестков могут быть подавлены с помощью устройства «Помехи от моря». Поскольку ВАРУ подавляет и полезный эхо-сигнал, его введение должно быть, кратковременным только для опознания ложных сигналов. Действительным при многократном отражении от близких объектов является только первый эхо- сигнал. Остальное можно убрать усилением, чтобы убедиться в том, где истинные, а где ложные эхо-сигналы. Ложные сигналы исчезают сами при увеличении дистанции или вменении взаимного ракурса объектов. Ложные эхо-сигналы от берега иногда маскируют эхо-сиг- налы малых судов, находящихся в зоне помех. Поэтому необходимо внимательно следить за этой зоной, периодически уменьшая усиление приемника.
Выбор режима индикации. Режим индикации выбирается исходя из конкретных условий плавания. В режиме относительного движения (ОД) наиболее наглядно и просто оценивается опасность столкновения и раньше обнаруживается изменение скорости. цЬлей, следующих пересекающимися курсами. В режиме истинного движения (ИД) раньше обнаруживаются малые неподвижные цели, нагляднее и проще выделяются цели движущиеся и неподвижные, раньше обнаруживается изменение курса встречными ‘судами. В то же время в режиме ИД сложнее оценка опасности столкновения и предполагаемой дистанции расхождения. Наиболее употребительным является режим ОД. При наличии на судне двух РЛС удобно один индикатор использовать в относительном, а другой — в истинном движении.
Выбор ориентации изображения. Наибольшую точность измерения пеленга, сопоставление радиолокационной информации с картой, упрощение расчетов обеспечивает режим ориентации «Север». При работе в этом режиме следует после каждого изменения курса проверять согласование индикатора РЛС с репитером гирокомпаса. В режимах ориентации «Курс» и «Курс стабилизированный» изображение на экране РЛС соответствует карт?ше, наблюдаемой визуально с мостика. В режиме «Курс» точность радиолокационного пеленгования и, как следствие, точность оценки опасности столкновения и предполагаемой дистанции расхождения существенно уменьшаются. При изменении курса судна или значительном рыскании происходит «смазывание» радиолокационного изображения.
Выбор шкал дальности. Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8—16 миль) с периодическим просмотром окружающей обстановки на шкалах как более мелкою, так и более крупного масштаба. В стесненных водах наблюдение рекомендуется вести исходя из обстоятельств плавания на шкалах крупного масштаба с периодическим обзором на мелкомасштабных шкалах. Шкалы дальности 32 и 64 мили используются для определений места судна по высоким берегам. После обсервации необходимо сразу перейти на шкалы средней или малой дальности для продолжения наблюдения. При расхождении с целями на близких расстояниях следует использовать крупномасштабные шкалы, на которых более точно оценивается степень опасности и быстрее обнаруживаются маневры целей.
Как правило, применительно к обстановке выбирается шкала, дающая разумный компромисс между наблюдением за ближними целями и достаточной дистанцией обнаружения новых целей. Совмещение этих противоположных требований может быть достигнуто применением крупномасштабной шкалы в относительном движении со смещенным центром развертки.
Выполнение измерений пеленга и дистанции. Все измерения должны выполняться на одной и той же шкале дальности, одним и тем же наблюдателем и одним и тем же приемом. Сначала рекомендуется измерять пеленг, затем сразу же расстояние. Направление измеряется механическим или электронным визиром с точностью 0,5°. Линия визира должна делить отметку цели пополам. При этом точность отсчета пеленга электронным визиром не зависит от смещения центра развертки во всех режимах. Расстояние измеряется совмещением подвижного круга дальности (ПКД) с эхо-сигналом таким образом, чтобы наружный край ПКД совпал с внутренним краем отметки. При измерении расстояния электронным визиром конец визира устанавливается примерно на 0,5 мм в ближнюю к центру экрана кромку эхо-сигнала. Измерение пеленгов и дистанций может быть выполнено с помощью системы автосопровождения, данные которой обычно точнее полученных вручную.
При обнаружении нескольких эхо-сигналов измерения рекомендуется выполнять в одной и той же последовательности через установленные интервалы времени и каждый цикл измерений относить к одному моменту времени, например, к моменту измерений данных первой цели.
Приближенное измерение расстояний может выполняться с помощью неподвижного круга дальности (НКД) и параллельных линий механического визира. Приближенное измерение направлений выпол-
Няется установкой па глаз одной из линий механического визира параллельно определяемому вектору со снятием отсчета по концу центральной линии с азимутальной шкалы.
Непрерывность наблюдения. Возможность отвлечения от экрана РЛС в условиях ограниченной видимости для выполнения других обязанностей (навигационные определения, радиотелефонные переговоры и т. д.) зависит от обстановки и в самых благоприятных условиях (достаточное водное пространство, отсутствие целей вблизи судна, малая вероятность появления мелких судов), как правило, не превышает 3—£ мин.
Суда с плохой отражающей способностью обнаруживаются на небольших расстояниях и, очевидно, даже кратковременные отвлечения от экрана РЛС могут привести к тому, что такие суда не будут своевременно обнаружены. В районах с интенсивным движением, а также при плавании вблизи берегов, где возможна встреча судов и объектов с малой отражающей способностью, с целью обеспечения непрерывного радиолокационного наблюдения, как правило, ходовая вахта усиливается и обязанности распределяются между двумя судоводителями.
Наличие теневых секторов, особенно впереди траверза, превращает даже непрерывное наблюдение в периодическое (в этих секторах) и требует регулярных отворотов для просмотра теневых секторов. Следует помнить, что причиной возникновения теневого сектора может быть находящееся поблизости крупнотоннажное судно (см. рис. 18.2).
Ограничения, свойственные радиолокационной информации. Следу* ет принимать во внимание, что даже самое современное радиолокационное оборудование не может полностью заменить визуальное наблюдение.
Основным ограничением при использовании РЛС является задержка информации, т. е. наличие значительного интервала времени (1—3 мин) между изменением ситуации вследствие маневра цели и обнаружением этого изменения оператором судовой РЛС. Кроме того, вследствие радиолокационных помех, волнения моря, метеорологических аномалий, малой отражающей поверхности некоторых судов и объектов отдельные цели могут быть вообще не обнаружены или не обнаружены своевременно.
В результате -выполнения радиолокационных наблюдений определяется только наличие цели и ее местоположение, что является неполной радиолокационной информацией. Для получения полной информации необходимо произвести ее обработку. Целью обработки информации является получение полных и точных данных о наличии ситуации столкновения или чрезмерного сближения и степени ее опасности, об элементах движения целей, определение необходимости маневра и его выполнение. Обработка радиолокационной информации начинается с момента обнаружения цели на экране РЛС и заканчивается после полного расхождения с ней.
19.3. Определение обстоятельств встречи и элементов движения целей
Критерии опасности. Если судно-наблюдатель или цель, или то и другое вместе будут двигаться, эхо-сигнал будет перемещаться на экране индикатора, оставляя за собой слабый светящийся след послесвечения — «хвоег». Перемещение эхо-сигнала на экране индикатора относительного движения является результатом взаимного перемещения двух объектов: судна-наблюдателя и цели. Линия перемещения эхо- сигнала называется линией относительного движения (ЛОД).
Обнаружив присутствие другого судна только с помощью РЛС, наблюдатель должен прежде всего определить, развивается ли ситуация чрезмерного сближения и (или) существует ли опасность столкновения. Если ЛОД проходит через начало развертки или вблизи него, то опасность столкновения существует. Критериями опасности столкновения судов являются основные обстоятельства встречи — расстояние кратчайшего сближения судов DKP и время от последнего момента наблюдений до момента кратчайшего сближения tKP. Ситуация чрезмерного сближения существует при DKP<D3ад. Чем меньше Ькр и р, тем больше степень опасности столкновения. В некоторых случаях определяются дополнительные обстоятельства встречи — дистанция пересечения курса £>ПеР, время до пересечения курса /пер, относительный курс /Со и относительная скорость V0.
Если существует опасность столкновения и (или) чрезмерного сближения, то необходимо своевременно предпринять надлежащие действия для расхождения на безопасном расстоянии. Для принятия правильного решения важно знать элементы движения других судов; т. е. их курсы и скорости.
Обстоятельства встречи и элементы движения судов опытным наблюдателем могут быть оценены ориентировочно по послесвечению, наблюдаемому на экране индикатора. Более точно обстоятельства встречи и элементы движения судов определяются графической прокладкой. Различают прокладку истинную и относительную.
Если на экране индикатора обнаружены эхо-сигналы нескольких судов, то на основании глазомерной оценки ситуации выбирают для прокладки опасные и потенциально опасные цели. Потенциально опасными называют цели, которые в данный момент не опасны, но могут стать опасными при предполагаемом маневре нашего судна или вероятном маневре цели.
Истинная прокладка. Такая прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем. Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние Db пускают секундомер, замечают судовое время Тj, курс своего судна Кн и отсчет лага оль По пеленгу и расстоянию наносят местоположение эхо-сигнала А\ относительно своего местоположения, предварительно выбрав желаемый масштаб (рис. 19.1). Через определенный промежуток времени (для расчетов удобен интервал в
3или 6 мин) наблюдения повторяют (П2, D2y Т2% ол2) и наносят местоположения своего судна 02 и наблюдаемого судна Л2. Проведя через точки A j и А2 прямую линию, получим линию истинного перемещения цели Кц.
По расстоянию между точками А\ и А2 и по времени Т\ и Т2 можно определить скорость цели Уц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна ГПер и Dnep.
Для определения расстояния кратчайшего сближения DKP и времени до него /Кр из точки А2 откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями v42F=0i02. Отрезок О\С, проведенный перпендикулярно к линии, проходящей через точки А\ и F\ будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки 04 и А4) можно найти параллельным перемещением

|
 отрезка OiС в положение О4С4. Время сближения на кратчайшее расстояние:
отрезка OiС в положение О4С4. Время сближения на кратчайшее расстояние:
OfO*
 и ТКр — Т% \- *кр-
и ТКр — Т% \- *кр-
VH
Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (А Лг, Л3) на одной прямой и равенство расстояний А\А2~АъАъ свидетельствуют как об отсутствии промахов в наблюдениях, так п о неизменности элементов движения цели в период от Т, до Г3.
К достоинствам способа истинной прокладки следует отнести его наглядность. Недостатком является относительная трудоемкость графических построений, необходимых для определения основных обстоятельств встречи: дистанции кратчайшего сближения и времени до него.
Относительная прокладка. Эта прокладка получила широкое распространение, так как этим способом более быстро и легко находятся ответы на главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения. '
Из точки О, принимаемой за место своего судна, прокладывают наблюдаемые пеленги П1 и Пг и по ним расстояния D\ и D2 (рис. 19.2). Через полученные точки Ах и Л2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения ОкР. Время сближения на кратчайшее расстояние:
' ~ и Ткр =я 7Vb /кр-
 «нр =
«нр =
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную до пересечения с ЛОД.) Время пересечения Г„ср определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке Л2 промежутка времени /ПеР:
А,П
Дата добавления: 2016-07-09; просмотров: 1754;