Погрешность дистанции кратчайшего грешность определения курса цели
Сближения £>кр /Си
Погрешность в определении tKр зависит от отношения *Кр/Д*н и относительной скорости цели. Для встречных целей ot «0,5ч-1,0 мин,
кр
при обгоне а*кр «2ч-3 мин.
Погрешность в определении курса цели зависит от ДtH и скорос ти цели. Чем меньше скорость цели, тем больше погрешность в определении ее курса (рис. 19.6). Погрешность в определении скорости цели также зависит от At„ (рис. 19.7). Следует иметь в виду, что фактические погрешности в определении /Сц и Уц будут больше вследствие погрешностей в курсе и скорости судна-наблюдателя.
Определение маневра наблюдаемого судна. Если судно-иаблюда- гель и наблюдаемое судно не изменяют своих элементов движения, то нанесенные на маневренный планшет через одинаковые промежутки времени относительные позиции наблюдаемого судна будут ложиться на одной прямой примерно в одинаковом расстоянии (с учетом возможных ошибок). На рис. 19.8, например, видно, что в промежутке между первым и третьим моментами наблюдений (точки А\% А2, Л3) наблюдаемое судно не изменяло своих элементов движения.
Если очередная нанесенная позиция наблюдаемого судна ложится в стороне от линии относительного курса (точки А4 и Л5), то при отсутствии промаха в измерениях это говорит об изменении курса и (или) скорости наблюдаемого судна.
Для определения маневра, сделанного наблюдаемым судном, можно сделать следующие построения (см. рис. 19.8):
 к точке Аз проводим вектор движения (скорости FH судна-наблюдателя) ;
к точке Аз проводим вектор движения (скорости FH судна-наблюдателя) ;
уз Г 3 —\
2--------
/-------
0 2 4 6 в 10 At, мин
Рис. 19.7. Средняя квадратическая погрешность определения скорости цели Уц

|
| \Sn(3muh) |
| Рис 19.10. Классификация цели вблизи курсовой черты |
| Рис. 19.9. Глазомерная оценка обстоятельств встречи и элементов движения цели |
 из начала 7„ (точка 02) проводим новый вектор движения (скорости Рц) наблюдаемого судна (в точку А$).
из начала 7„ (точка 02) проводим новый вектор движения (скорости Рц) наблюдаемого судна (в точку А$).
На рис. 19.8 вектор скорости судна-наблюдателя построен в масштабе 1 : 10 (т. е. вектор движения за б мин), интервал времени между третьим и пятым наблюдениями также 6 мин. В случае, приведенном на рис. 19.8, мы видим, что наблюдаемое судно отвернуло вправо и одновременно уменьшило скорость.
Глазомерная оценка обстоятельств встречи и элементов движения цели. Обязательным этапом обработки радиолокационной информации является глазомерная оценка ситуации на экране индикатора PJ1C. Такая оценка осуществляется после обнаружения эхо-сигнала. Она предшествует радиолокационной прокладке и не прекращается до полного расхождения. При большом количестве эхо-сигналов целей глазомерная оценка ситуации позволяет отобрать для радиолокационной прокладки опасные и потенциально опасные цели.
DKр и Z)nep определяются глазомерно мысленным построением Л ОД цели. Для этого необходимо продолжить за эхо-сигнал след послесвечения (рис. 19.9). На мелкомасштабной шкале, где плохо заметен след послесвечения, устанавливают на эхо-сигнале перекрестье визира и подвижного круга дальности. Спустя некоторое время, когда эхо-сигнал сойдет с перекрестья, мысленно проводят ЛОД цели через перекрестье и позицию эхо-сигнала.
Для оценки примерного направления движения цели (ее ракурса) необходимо иметь навыки мысленного построения треугольников скоростей у следа послесвечения цели. На рис. 19.9 все мысленные построения показаны пунктиром.
Если эхо-сигнал находится вблизи курсовой черты и след его послесвечения параллелен курсовой черте, цель легко может быть классифицирована (встречная, неподвижная или попутная) сравнением относительной скорости со скоростью судна-наблюдЬтеля. Для этого замеряют изменение расстояния до цели за 2 или 3 мин и, умножив иа 3 или 2 соответственно, получают относительное перемещение цели за 6 мин. Вычитая из полученного перемещение судна-наблюдателя за 6 мин, получают перемещение цели за 6 мин (со знаком «+»— встречное, со знаком «с—»— попутное).
В условиях мостика для классификации цели пользуются следующим приемом. Замерив расстояние до цели по курсу и запустив секундомер, смещают ПКД на расстояние, проходимое судном-наблюда-
гелем за 3 мин. Если через 3 мин эхо-сигнал окажется на ПКД — цель неподвижная, перейдет ПКД — встречная, не дойдет до ПКД — попутная (рис. 19.10).
19.4. Выбор и обоснование маневра
Если суда не находятся на виду друг у друга при плавании в районах ограниченной видимости или вблизи таких районов, то при выборе маневра руководствуются Правилами раздела I «Плавание судов при любых условиях видимости» (Правила 4—10) и Правилом раздела III «Плавание судов при ограниченной видимости» (Правило 19).
При выборе маневра необходимо учитывать то, что он не должен быть противоположным маневру, который обычно предпринимает судоводитель для расхождения с другими судами при входе в визуальный контакт. В противном случае внезапное улучшение видимости или сближение на расстояние визуального контакта может поставить судоводителя в трудное положение, поскольку как только суда, идущие в районе ограниченной видимости или вблизи него, окажутся на виду друг у друга, они должны выполнять правила раздела II.
Прогнозирование последствий маневра судна-наблюдателя. Оценить последствия предполагаемого маневра своего судна можно, если по результатам наблюдений за целью имеется ее ЛОД и построен треугольник скоростей (рис. 19.11). В этом случае для определения предполагаемой дистанции расхождения после маневра судна-наблюдателя и при условии неизменности элементов движения цели необходимо выполнить следующие построения:
из начала вектора V» (точка Oj) построить новый вектор судна- наблюдателя Рщ;
провести новый вектор относительной скорости Ft,i из конца век тора P„i в конец вектора 7Ц;
на ЛОД найти позицию, цели в момент маневра судна-наблюдателя по предполагаемому времени начала маневра и относительной скорости V* (точка Af);
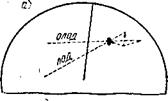
из точки М провести ожидаемую линию относительного движения (ОЛОД) параллельно вектору V0\;

 |
определить ожидаемую дистанцию расхождения как кратчайшее расстояние от центра планшета до ОЛОД (отрезок ОС);
|
| Рис. 19.13. Глазомерная оценка тенденции разворота ЛОД |
 время от начала маневра до кратчайшего сближения можно оценить, откладывая по ОЛОД новую относительную скорость.
время от начала маневра до кратчайшего сближения можно оценить, откладывая по ОЛОД новую относительную скорость.
Следует иметь в виду, что вследствие погрешностей в относительных позициях цели направление ОЛОД и ожидаемая дистанция расхождения получены с погрешностью, величина которой может быть определена по графику на рис. 19.5.
Прогнозирование последствий маневра цели. Для оценки последствий предполагаемого маневра цели необходимо из начала вектора Fu (точка Oi) построить новый вектор цели РЦ1 (рис. 19.12). Все последующие построения аналогичны построениям при прогнозировании последствий маневра судна-наблюдателя.
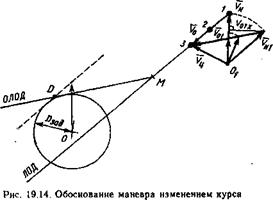
Глазомерная оценка тенденции разворота ЛОД. Навыки мысленного построения треугольников скоростей у следа послесвечения цели позволяют оценить направление разворота ЛОД вследствие предполагаемого маневра судна-наблюдателя и (или) цели. На рис. 19.13, а по казаны пунктиром мысленные построения при предполагаемом повороте своего судна вправо (в данном случае DKP увеличится). На рис.
19.13,6 показаны соответствующие построения при предполагаемом убавлении скорости цели (в этом случае DKP уменьшается).
Как правило, тенденция разворота ЛОД оценивается в первоначальный момент маневра, т. е. при малых изменениях элементов движения судов.
Например, в ситуации на рис. 19.13, б при дальнейшем уменьшении скорости цели ЛОД перейдет через центр, и Дф после этого начнет увеличиваться. Несмотря на это, следует считать, что сбавление хода целью в данном случае может ухудшить ситуацию сближения, т. о. ЛОД имеет тенденцию разворота к центру экрана.
Выбор и обоснование маневра для расхождения в заданной дистанции. Если ДфСДзад, то необходимо предпринять маневр для расхождения с целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию ^ выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя £кр, Vo И Озад, выбирает время начала маневра.
Выбираемый маневр в соответствии с требованиями Правила 8 должен приводить к расхождению на безопасном расстоянии и, если позволяют обстоятельства, быть уверенным, своевременным и соответствовать хорошей морской практике. Изменение курса или скорости должно быть достаточно большим, чтобы легко обнаруживаться другими судами. «Если имеется достаточное водное пространство, то изменение только курса может быть наиболее эффективным действием
для предупреждения чрезмерного сближения при условии, что изменение сделано заблаговременно, является существенным и не вызывает чрезмерного сближения с другими судами», Правило 8(c). Еще два условия выбора маневра диктуются Правилом 19(d), (i), (ii): «...насколько это возможно, следует избегать изменения курса влево, если другое судно находится впереди траверза и не является обгоняемым; изменения курса в сторону судна, находящегося на траверзе или позади траверза».
Цель ограничений, накладываемых МППСС-72 на сторону изменения курса, состоит в том, чтобы по возможности избежать несогласованных, компенсирующих друг друга маневров расходящихся судов. В конечном итоге именно эго является непосредственной причиной многих столкновений судов. Граница «на траверзе» и «впереди траверза» в Правилах четко не определена, однако в большинстве комментариев отмечается, что положение «на траверзе» включает в себя по два румба в обе стороны от курсового угла 90°. Поэтому при расхождении с целью на курсовом угле 67,5—90° правого борта (одна из пограничных ситуаций) изменение курса влево не будет нарушением Правила 19 (d). При расхождении с целью, приближающейся с кормы на 9= 180°±22,5° (вторая пограничная ситуация), сторона изменения курса Правилами не определена, однако большинство специалистов в этом случае рекомендуют изменение курса влево.
Ограничения, накладываемые Правилом 19 (d) на сторону изменения курса, достаточно строгие. Поэтому, как правило, при расхождении с целью впереди траверза вначале проверяется возможность изменения курса вправо, затем уменьшения скорости и только при невозможности разойтись этими маневрами вследствие навигационных ограничений или других судов может быть принято решение изменить курс влево. В этом случае маневр должен быть выполнен существенно раньше и быть более решительным, чем в случае изменения курса вправо.
Последующая графическая прокладка служит для проверки безопасности выбранного* маневра и уточнения его величины.
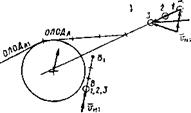
Графическая прокладка для обоснования маневра расхождения в заданной дистанции показана на рис. 19.14. Она осуществляется в следующей последовательности:
|
на ЛОД по предполагаемому времени маневра или по предполагаемой дистанции маневра наносится точка М местоположения цели в момент начала маневра расхождения;
мысленным разворотом вектора VH или изменением его длины в соответствии с выбранным видом маневра определяют сторону разворота ЛОД при этом маневре;
из точки М проводят по касательной к Озгл ОЛОД; при этом из двух возможных касательных к Z)3aд проводится та, которая соответствует стороне разворота ЛОД при выбранном виде маневра;
через конец вектора Гц параллельно ОЛОД в направлении, противоположном направлению ОЛОД, проводится линия вектора новой относительной скорости;
если выбран маневр изменением курса, то новое направление вектора скорости судна-наблюдателя VH\ находят разворотом вектора Гн вокруг точки Oi до пересечения с линией вектора новой относительной скорости; угол между векторами VH\ и Vн определит требуемый угол отворота;
если выбран маневр скоростью, то новый вектор скорости судна- наблюдателя равен отрезку вектора от точки 0{ до линии новой относительной скорости;
если выбран комбинированный маневр курсом и скоростью, то для нахождения нового курса судна-наблюдателя вокруг точки Oi разворачивается уменьшенный в соответствии с предполагаемым сбавлени- ем скорости вектор судна-наблюдателя.
Возвращение к прежним элементам движения. С выбором и осуществлением маневра процесс расхождения не заканчивается. Судоводитель должен тщательно контролировать эффективность предпринятого маневра. Если последующая радиолокационная прокладка показала, что Окр<£>заД, следует исходя из обстоятельств данного случая предпринять дополнительный маневр, а если необходимо предотвратить столкновения или иметь больше времени для оценки ситуации, то в соответствии с Правилом 8(e)—уменьшить ход или остановиться, застопорив машины или дав задний ход.
Если последующая радиолокационная прокладка показала, что в результате предпринятого маневра судна-наблюдателя (или маневра судна-наблюдателя и маневра цели) DKp^D3aay судоводитель должен оценить возможность возвращения своего судна к прежним элементам движения. Для этого рекомендуется провести касательную к заданной дистанции расхождения, параллельную ЛОД до предпринятого маневра (на рис. 19.14 эта линия показана пунктиром).
После пересечения целью этой линии судно-наблюдатель может вернуться к прежним элементам движения, не сближаясь при этом с целью ближе £>эад.
После возвращения к прежним элементам движения радиолокационную прокладку ведут до тех пор, пока другое* судно не будет окончательно пройдено и оставлено позади.
Учет навигационных ограничений. При плавании в узкости маневр, который выбирают и обосновывают для расхождения, должен одновременно и в равной степени обеспечивать и навигационную безопасность судна-наблюдателя. С этой целью при обосновании маневра следует:
исходя из навигационной обстановки знать безопасную дистанцию отхода от линии пути судна Sfie.w,
опустив перпендикуляр из конца вектора Гщ на вектор Гп, определить скорость отхода от линии пути УОТх, т. е. расстояние, иа которое смещается свое судно в сторону от линии пути каждые 6 мин в процессе расхождения с целью (см. рис. 19.14);
определить время расхождения по V0\ и расстоянию АШ; определить дистанцию отхода Soтх = Уотх^рас*;
если 50тх>5безоп, то предполагаемый маневр опасен в навигационном отношении и следует выбрать маневр с меньшей скоростью отхода (например, комбинированный маневр).
Учет маневра цели. Выбирая маневр по расхождению с другим судном, конечно, никогда нельзя быть уверенным, что это судно само не предпримет какого-либо маневра, а будет следовать постонным курсом и постоянной скоростью. Поэтому, выбрав маневр в предположении постоянства элементов движения цели, после его выполнения необходимо тщательно наблюдать за эхо-сигналом этого судна до тех пор, пока суда не разойдутся.
Неблагоприятный маневр цели приводит к уменьшению расстояния кратчайшиего сближения, а в некоторых случаях может свести на нет предпринятые нами действия. Поэтому судоводитель должен уметь при решении задачи учитывать влияние маневра другого судна на изменение обстоятельства встречи.
Если в процессе расхождения могут быть сделаны предположения о возможном маневре цели, то этот предполагаемый маневр может быть учтен при выборе маневра судна-наблюдателя. В этом слу* чае новый векторный треугольник скоростей строится у измененного вектора скорости цели Ущ.
 Маневр расхождения с несколькими судами. Если на экране индикатора наблюдаются эхо-сигна-лы нескольких судов, то при выборе маневра для расхождения с наиболее опасным судном необходимо принимать во внимание суда, ситуация сближения с которыми может ухудшаться в результате маневра. Например, оценивая обстоятельства встречи с двумя судами (рпс. 19.15), видим, что разойтись с опасным судном А можно как отворотом вправо, так и уменьшением скорости. Однако, разворачивая вправо вектор Vu в треугольнике скоростей судна В, убеждаемся, что при нашем повороте вправо судно В становится опасным (показано пунктиром). В данном случае, по-видимому, целесообразнее выбрать маневр уменьшением скорости, который ведет к расхождению с судном А и не ухудшает ситуацию сближения с судном В.
Маневр расхождения с несколькими судами. Если на экране индикатора наблюдаются эхо-сигна-лы нескольких судов, то при выборе маневра для расхождения с наиболее опасным судном необходимо принимать во внимание суда, ситуация сближения с которыми может ухудшаться в результате маневра. Например, оценивая обстоятельства встречи с двумя судами (рпс. 19.15), видим, что разойтись с опасным судном А можно как отворотом вправо, так и уменьшением скорости. Однако, разворачивая вправо вектор Vu в треугольнике скоростей судна В, убеждаемся, что при нашем повороте вправо судно В становится опасным (показано пунктиром). В данном случае, по-видимому, целесообразнее выбрать маневр уменьшением скорости, который ведет к расхождению с судном А и не ухудшает ситуацию сближения с судном В.
При достаточном навыке дополнительные графические построения в тре-
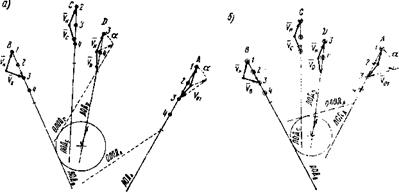 Рис. 19.16. Анализ ситуации при расхождении с несколькими судами:
а —потенциально опасное судно А не повлияло на вид и величину маневра: б — потенциально опасное судно А повлияло на величину маневра
Рис. 19.16. Анализ ситуации при расхождении с несколькими судами:
а —потенциально опасное судно А не повлияло на вид и величину маневра: б — потенциально опасное судно А повлияло на величину маневра
|
угольнике скоростей судна В не производятся, а тенденция изменения относительного курса оценивается на глаз. Такая оценка позволяет из большего количества целей выбрать те суда, которые могут быть опасны при выборе маневра. В ситуации на рис. 19.16, а нетрудно убедиться, что маневром для расхождения с судном D является отворот вправо. Дистанция расхождения с судами В и С увеличится, а дистанция расхождения с судном А уменьшится. В этом случае необходимо решать задачу расхождения с судами А и D. Проведя ОЛОД судна D по касательной к Д»ад. переносим ее в конец вектора VD и засечкой своей скоростью находим угол отворота вправо а. Развернув на такой же угол вектор своей скорости в треугольнике скоростей судна А и проведя ОЛОДд параллельно Роь убеждаемся, что с судном А расходимся безопасно. При малом расстоянии между ЛОД судов А и D в подобной же ситуации решается задача по расхождению с одним судном (судном А) левыми бортами (рис. 19.16,6).
Потенциально опасное судно может повлиять не только на величину, но и на вид маневра. В ситуации на рис. 19 17, если бы не было судна-сателлита В, наиболее вероятным маневром расхождении с опасным судном С было бы изменение курса вправо. Однако потенциально опасное судно В становится опасным при повороте судна-наблюдателя вправо. В этих условиях выбран маневр расхождения уменьшением скорости. В процессе расхождения судно В перейдет в по-
|
| Рис. 19.17. Потенциально опасное судно В повлияло на вид маневра |
т
Рис. 19.18. Потенциально опасное судно Рис. 19.19. Временное приведение потен- В повлияло на время маневра циально опасного судна на опасную
ЛОД
ложение Вх и после возвращения судна-наблюдателя к прежнему движению судно В вновь станет сателлитом, но уже впереди траверза.
В ситуации на рис. 19.18 потенциально опасное судно В повлияло на время маневра. Если бы его не было, маневр расхождения с опасным судном А был бы предпринят существенно раньше. Анализ ситуации показал, что целесообразно вначале разойтись с потенциально опасным судном В, а затем по корме у него изменить курс вправо для расхождения с опасным судном.
В ситуации на рис. 19.19 потенциально опасное судно В не повлияло на вид, величину и время маневра. Однако для расхождения с опасным судном А выбран маневр, временно приводящий судно В на опасную ЛОД. Анализ ситуации показывает, что за время расхождения с судном А судно В вследствие малой относительной скорости не успеет войти в опасную зону. После возвращения судна-наблюдателя на прежний курс ОЛОДв! пройдет безопасно.
При обосновании маневра расхождения с несколькими судами необходимо, как правило, наносить на планшет полный анализ ситуации, т. е. не только ОЛОД судов после маневра, но ОЛОД| после возвращения к прежним элементам движения (см. рис. 19.17—19.19). В некоторых случаях, когда осуществляется последовательное расхождение с несколькими целями, возможны промежуточные ОЛОД.
При расхождении с судами рекомендуется следующая последовательность действий.
1. Нанести первые позиции судов и построить векторы скорости судна-наблюдателя в масштабе 1 : 10 (векторы движения за 6 мин).
2. Навести вторые (если позволяет обстановка, то и третьи) позиции судов (удобнее через интервалы времени, кратные 3 мин); нанести экстраполированные (или интерполированные) точки на 6 мин; построить векторы целей.
3. Проанализировать ситуацию сближения, выбрать вид маневра (поворот вправо, влево, изменение скорости), а также суда, наиболее опасные при данном маневре.
4. Уточнить маневр (на сколько градусов поворачивать, какой дать ход); построить новые векторные треугольники и ожидаемые линии относительного движения.
5. Выполнить маневр.
6. Проконтролировать эффективность маневра.
19.5. Учет инерции судна
Учет циркуляции. В соответствии с НШС элементы поворотливости представлены в таблице маневренных элементов в виде графика и таблицы при циркуляции с полного переднего хода на правый и левый борт в грузу и в балласте с положением руля «на борт» (р= =35°) и «на полборта» (р= 15ч-20°). Следует, однако, иметь в виду, что параметры фактической циркуляции судна могут существенно отличаться от табличных в зависимости от скорости судна, его посадки (крена и дифферента), соотношения осадки и глубины, направления, силы ветра и волнения.
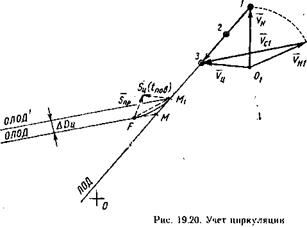
При изменении курса судном-паблюдателем (рис. 19.20) относительное местоположение цели будет перемещаться по криволинейной траектории ог точки М\ на ЛОД (в момент начала маневра судна-наблюдателя) до точки F на ОЛОД (в момент окончания маневра). В дальнейшем цель перемещается по ОЛОД, смещенной на расстояние ДОц. Реальное относительное перемещение цели будет, конечно, сложнее. Вследствие падения скорости судна-наблюдателя на циркуляции ОЛОД не будет параллельна вектору V0\ до тех пор, пока наше судно вновь не наберет на прямом курсе первоначальную скорость хода. В данном случае падение скорости на циркуляции частично компенсирует ADц. Во многих случаях, например, при расхождении со встречной целью вследствии падения скорости судна-наблюдагеля на повороте АОц значительно увеличивается. Учет циркуляции возможен следующими способами (см. рис. 19.20).
I. Способ относительного промежуточного курса. Из графической прокладки находят требуемый угол изменения курса. Из таблицы ма* невренных элементов по углу отворота находят время, затрачиваемое судном на поворот /ман, угол промежуточного курса и промежуточ-
|
ное плавание 5„р. Из точки Mi позиции цели в момент начала поворота откладывают Su за время поворота. Из конца вектора в сторону, обратную промежуточному курсу, откладывают промежуточное плавание 5ПР. Через начало вектора 5Пр проводится ОЛОД параллельно Г01.
Способ точен, но трудоемок. При решении задач расхождения на мостике судна не применяется.
Применяется при разборе аварий и в качестве эталонного при оценке точности приближенных способов.
2. Способ условной упрежденной точки. ОЛОД проводится не из точки М\ местоположения судна-цели в момент начала маневра, а из условной упрежденной точки М, отнесенной по ЛОД вперед на время упреждения /упр. В первом приближении в качестве tуи» принимают половину времени поворота. Таким образом, при этом способе учета циркуляции поворот судна-наблюдателя начинается на {упр«0,5/Маи раньше, чем цель придет в точку, из которой проведена ОЛОД.
Способ наиболее часто применяется на практике, более точен для встречных целей и менее точен для целей, идущих сходящимися курсами. Неприменим при Повороте под корму судна-сателлита, так как в этом случае Уо=0 и при любом *у1ф точки М и совпадают.
3. Способ введения поправки в Ьзал. Как показывают расчеты, при изменении* курса судна-наблюдателя на угол до 90° погрешности в DKp вследствие инерционности поворота не превышают тактического радиуса циркуляции, при больших углах поворота достигают диаметра циркуляции. В этом способе /)3.,л назначается с запасом на максимально возможную погрешность от неучета циркуляции. Этот способ является основным при повороте под корму потенциально опасного судна, идущего параллельным или почти параллельным курсом.
Учет инерции при маневре скоростью. Инерционные характеристики судна в соответствии с НШС представляются в виде графиков, построенных в постоянном масштабе расстояний и имеющих шкалу значений времени и скорости.
При изменении скорости судиом-наблюдателем относительное местоположение цели будет перемещаться по криволинейной траектории, кривизна которой постепенно уменьшается по мере выхода своего судна на новую установившуюся скорость. Погрешности от неучета инерции при маневре скоростью могут достигать нескольких миль — отсюда важность учета инерции. При маневре скоростью на крупно- тоннажном судне новая скорость судна-наблюдателя устанавливается через десятки минут, и все это время цель перемещается по кривой ЛОД — отсюда сложность учета инерции.
Учет инерции возможен следующими способами.
1. Способ построения кривой ОЛОД. Относительная траектория перемещения судна может быть найдена построением путевых треугольников за последовательные интервалы времени t„ после маневра S„(fi)=Su(/i)— SH(ti).
Для построения кривой ОЛОД (рис. 19.21) необходимо:
из точки М местоположения цели в момент начала маневра на шего судна провести линию курса цели и отметить на ней отрезки, проходимые целью через определенные интервалы времени, например через каждые 3 мин (точки В{, #2, • , Вп)\ из точек В, провести линии в сторону, обратную курсу судна-наблюдателя, и отложить по ним отрезки, пройденные судном-наблюда гелем за соответствующее время после маневра (точки С,, С2, Сп)\ через точки С, провести кривую
г
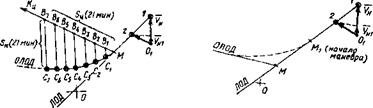 Рис 19/21. Учет инерции построением кривой ОЛОД
Рис. 19.22. Учет инерции способом условной упрежденной точки
Рис 19/21. Учет инерции построением кривой ОЛОД
Рис. 19.22. Учет инерции способом условной упрежденной точки
|
ЛОД и определить Окр как кратчайшее расстояние от центра планшета до кривой.
Способ точный и наглядный, но трудоемкий. Этим способом можно решить только задачи предсказания DKP по выбранному маневру, но не решается задача по нахождению требуемого изменения скорости для расхождения в заданной дистанции. Для решения задач в условиях мостика этот способ не применяют. Он используется при разборе аварий, а также в качестве эталонного для оценки точности приближенных способов учета инерции.
2. Способ введения поправки в Д..Д. Если в качестве меры инерционности судна принять характеристику tVt то максимальная ошибка от неучета инерции не превысит AD„^0,3VVi.' (Д£>и, кб; V„, уз; /г, мин). Для судов с V„^10 уз и /0^1 мин Д/)„ не превышает 3 кб. В этом случае йЗЛА может назначаться с запасом на максимально возможную ошибку. Этот способ может быть основным для судов водоизмещением до 1000 т.
3. Способ условной упрежденной точки (рис. 19.22). При этом способе учета инерции в треугольнике скоростей откладывается новая установившаяся скорость судна-наблюдателя, но ОЛОД проводится не из точки М\ местоположения цели в момент начала маневра, а из условной упрежденной точки М, отнесенной от точки М\ по ЛОД вперед на время упреждения /уПр. В первом приближении в качестве tynv принимают половину времени, за которое устанавливается новая скорость своего судна. Таким образом, при этом способе учета инерции команда на сбавление хода дается на /Уир~0,5/Ман раньше, чем судно- цель придет в точку, из которой проведен ОЛОД. При правильном выборе времени упреждения ОЛОД пройдет по касательной к фактической траектории эхо-сигнала.
При этом способе учета инерции условно считается, что в течение /уПр сохраняется прежняя скорость судна-наблюдателя, VH (при этом завышается пройденный путь), а после мгновенно устанавливается новая скорость V»\ (при этом пройденный путь занижаете^). Как видно из рис. 19.23, оптимальным будет такое время упреждения, при котором завышение пройденного пути за время /у„р компенсируется последующим занижением. Это соответствует равенству заштрихованных^ площадей на рис. 19.23.
На рис. 19.24 приведена информация по выбору оптимального времени упреждения в зависимости от выбранного маневра (Vm/V* — = 0—Стоп, Vmi/V'm-= 0,5 — МПХ и т. д.) и характеристики инерционности /,. На основании этой информации в начале рейса может быть составлена рабочая таблица времени упреждения.
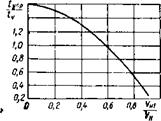 Рис. 19.24. Оптимальное время упреждения в зависимости от маневра и характеристики инерционности
Рис. 19.24. Оптимальное время упреждения в зависимости от маневра и характеристики инерционности
|



 Пример 1. Судно имеет инерционную характеристику = 4 мин и имеет следующую градацию скоростей ППХ-14 уз, СПХ-10 уз, МПХ-8 уз, СМПХ-5 уз. Составить рабочую таблицу времени упреждения.
Пример 1. Судно имеет инерционную характеристику = 4 мин и имеет следующую градацию скоростей ППХ-14 уз, СПХ-10 уз, МПХ-8 уз, СМПХ-5 уз. Составить рабочую таблицу времени упреждения.
Решение. ППХ-СПХ. Ущ/Ун — Ю: 14=*0,71. Из графика на рис. 19.24 fynp/f»*** = 0,8; ^упр — О^*4*3,2л?3 мин. Рассчитав аналогично для VWУн**0,57; 0,3; 0 получим время упреждения (мин) для маневров сбавления скорости с полного хода
|
|
|
|
/упр, МИН
Способ условной упрежденной точки рекомендуется в качестве основного для судов водоизмещения до 25—30 тыс. т.
4. Способ средней скорости. При этом способе учета инерции в треугольнике скоростей откладывается не новая скорость судна-наблюдателя, а некоторая средняя (эквивалентная) скорость за время от нача-
^н('кр)
ла маневра до момента кратчайшего сближения VCp— —;— . Через
Кр
концы векторов VCp и Vц проводится вектор средней относительной скорости и параллельно ему из точки М проводится ОЛОДср (рис. 19.25). Фактически эхо-сигнал будет перемещаться по кривой линии, расположенной между ЛОД и ОЛОДср выпуклостью в сторону ЛОД, и в точке кратчайшего сближения пересечений ОЛОДср.
В первом приближении в качестве средней скорости может быть принята средняя арифметическая между прежней и новой скоростью Vcp~0,5(Va-\-Vm). (19.2)
При малом времени до кратчайшего сближения (tKf)^2,btv) ошибка не превышает 10 % выбега судна при свободном торможении.
 Более точно величина средней скорости может быть найдена из универсальной таблицы учета инерции (табл. 19.1). Использование универсальной таблицы учета инерции рассмотрим на примерах.
Более точно величина средней скорости может быть найдена из универсальной таблицы учета инерции (табл. 19.1). Использование универсальной таблицы учета инерции рассмотрим на примерах.
Рис. 19.25. Учет инерции способом средней скорости
| Время от начала маневра до кратчайшего сближения при инерционных характеристиках t0, мин | Средняя скорость в до* лях от начальной ^Cp/VH при маневрах Ун1/Ун | |||||||||||
| 7 1 | 12 | | 1 и | 0,75 | 0,5 | | | 0,25 | |||||||
| 0,9 | 0,9 | 0,8 | 0,8 | |||||||||
| — | 0,9 | 0,8 | 0,7 | 0,7 | ||||||||
| И | 0,85 | 0,75 | 0,65 | 0,6 | ||||||||
| 0,8 | 0,7 | 0,6 | 0,5 | |||||||||
| — | 0,8 | 0,65 | 0,5 | 0,4 | ||||||||
| — | — | — | — | 0,8 | 0,6 | 0,4 | 0,3 | |||||
| 0,8 | 0,6 | 0,4 | 0,2 |
Примечания: IVU — скорость судиа-наблюдателя до маневра; У щ—скорость судна-наблюдателя после маневра; VCp— средняя (эквивалентная) скорость от начала маневра до момента кратчайшего сближения; tv — инерционная характеристика судна, численно равная времени падения скорости до величины 0,5 И* при маневре на «Стоп» (зависит от водоизмещения судна, начальной скорости и внешних условий).
Пример 2. Найти среднюю скорость судна за время от начала маневра ППХ — МПХ (Vhi=0,5Vh) До кратчайшего сближения, если /Мр&г20мин; /d«4mhh, а УПпхв
— 16 уз.
Решение. В табл. 19.1 в колонке tv=4 находим ближайшее к заданному /кр=»22 мин и в соответствующей строке для маневра 0,5 цолучаем УСр/Ун*=0,6. Среднюю скорость можно отложить в треугольнике скоростей глазомерным выделением 0,6 отрезка Уи или при необходимости перевести в узлы УСр = 0,6-16=9,6 уз.
Пример 3. По результатам радиолокационной прокладки получили, что для расхождения с целью в А|«д необходимо иметь УСр«0,5Уи. По ОЛОДср и V0 Ср определили время от начала маневра до кратчайшего сближения /Кр»20 мин. Инерционная характеристика судна 8 мин. Какой маневр скоростью необходимо предпринять для расхождения на £>3ад?
Решение. В табл. 19.1 в колонке /« = 8 находим ближайшее к заданному /Кр=*19 мин и в соответствующей строке ищем ближайшее меньшее значение Уср. В данном случае. УСр*=0,5кл находит в колонке «0». Для расхождения с целью в Ьэад необходимо, дать «Стоп». При маневре на «Стоп» есть возможность оценить фактическую скорость Vt судна к моменту расхождения, так как (Уср/Ун)2.
Дата добавления: 2016-07-09; просмотров: 2284;