Построив окружность /)аад, получаем: а) 1,9 мили; б) 1,5 мили; в) 1,5 мили; г) 1,2 мили.
Рассчитанные значения Озад являются ориентировочными, поскольку учитывают не все факторы, влияющие на ее величину. Так, например, если радиолокационное наблюдение вблизи судна (1-нЗ мили) затруднено или невозможно из-за помех от морского волнения, дистанция расхождения должна по возможности быть больше зоны помех.
На величину безопасной скорости также влияет целый ряд факторов, не учитываемых в примере 6 (см. Правило 6). В частности, наличие впереди траверза зоны, в которой затруднено или невозможно своевременное обнаружение целей (зона дождя, теневые секторы от деталей своего судна или от близко идущих судов-сателлитов и т.д.), может потребовать существенного снижения скорости судна.
Контрольные вопросы. 1. Какие разделы правил плавания и маневрирования МППСС*72 действуют при ограниченной видимости? 2. Какие ограничения свойственны радиолокационной информации? 3. Каким образом осуществляется прогнозирование последствий маневра своего судна и (или) цели? 4. Приведите примеры ситуаций, когда потенциально опасное судно повлияло на величину маневра, на вид маневра и на время начала маневра. 5. Какими способами может учитываться инерция судна при расхождении изменением скорости? 6. Каковы особенности решения задачи расхождения судов по данным РЛС при плавании в системе разделения движения или при пересечении полосы движения?
Глава 20.ИСПОЛЬЗОВАНИЕ СРЕДСТВ АВТОМАТИЧЕСКОЙ РАДИОЛОКАЦИОННОЙ ПРОКЛАДКИ (САРП)
20.1. Роль и место САРП в решении задач расхождения судов
Последовательность действий судоводителя при решении задачи расхождения в общем случае может быть разделена на следующие этапы:
1) своевременное обнаружение эхо-сигнала;
2) определение его относительной позиции (снятие отсчетов пеленгов и дистанций через определенные интервалы времени);
3) оценка степени опасности сближения (определение 0Кр и ^кр);
4) определение курса и скорости цели, обнаружение изменений в ее элементах движения;
5) принятие решения о необходимости маневрирования;
6) определение необходимых изменений курса и (или) скорости для расхождения с опасной целью в заданной (выбранной) дистанции;
7) оценка последствий предполагаемого маневра своего судна на расхождение с другими судами (учет потенциально опасных судов);
8) оценка навигационной безопасности предполагаемого маневра;
9) принятие решения на маневр с учетом пп. 6, 7, 8 в соответствии с МППСС-72, обычной морской практикой и обстоятельствами данною случая;
10) осуществление маневра;
11) контроль за эффективностью предпринятых действий;
12) оценка последствий предполагаемого манепра своего судна по возвращению к прежним элементам движения;
13) осуществление маневра по возвращению к прежним элементам движения;
14) контроль за безопасностью расхождения после возвращения к прежним элементам движения.
При наличии на судне САРП только часть из перечисленных этапов может быть полностью или частично возложена на САРП.
Автоматически, т. е. без участия оператора, выполняются пп. 2, 3,
4. САРП самостоятельно получает необходимую информацию, обрабатывает ее, представляя оператору данные о пеленге и дистанции до цели, ее курсе и скорости, дистанции кратчайшего сближения и времени до него.
Автоматизированно, т. е. с участием оператора, выполняются пп. 1, б, 7, 8, 11, 12, 14. При установке оператором режима автоматического захвата п. 1 может выполняться САРП автоматически. Однако вследствие свойственных САРП ограничений полностью полагаться на САРП на этом, наиболее важном этапе нельзя. При выполнении пп. 6,
7, 8, 12 САРП производит расчет последствий предполагаемых изменений курса и (или) скорости, задаваемых оператором. При выполнении пп. 11 и 14 САРП вычисляет параметры расхождения после изменения элементов движения своего судна, а оператор сопоставляет фактическое развитие ситуации с планировавшимся.
Таким образом, САРП не подменяет собой человека, а лишь освобождает его от выполнения утомительных и требующих времени вычислений, оставляя за судоводителем анализ ситуации, выбор маневра (пп. 5, 9) и его осуществление (пп. 10, 13).
САРП оказывают существенную помощь судоводителям в решении задач расхождения судов, способствуют повышению безопасности судовождения в случае грамотного их использования. При неграмотном использовании, чрезмерном доверии к САРП без учета их особенностей и ограничений, пренебрежении мерами предосторожности, требуемыми хорошей морской практикой, САРП может стать источником повышения опасности столкновения. Это проявляется в существующих случаях столкновений судов, одно из которых или оба были оборудованы САРП. В частности, одной из причин столкновения парохода «Адмирал Нахимов» с теплоходом «Петр Васев» было чрезмерное доверие к САРП и пренебрежение необходимыми мерами предосторожности капитаном теплохода «Петр Васев».
Сама по себе установка САРП на судне не обеспечивает предупреждения столкновений. Эту задачу решает судоводитель, хорошо знающий особенности использования САРП. Поэтому в дополнение к требованиям подготовки судоводителей по использованию радиолокационного оборудования ИМО предъявляет требования к обучению практическому использованию САРП. Все судоводители, несущие вахту на судне, оборудованном САРП, должны пройти официально утвержденный курс обучения по их использованию и иметь соответствующее квалификационное удостоверение. Это требование распространяет- ся на все суда, оборудованные САРП, независимо от того, подпадает ли это судно под требования ИМО к обязательной установке САРП.
20.2. Виды САРП
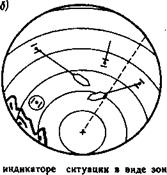
В зависимости от характера представления информации на индикаторе ситуации САРП делятся на два основных вида: с представлением информации в виде зон опасности и с векторным представлением информации.
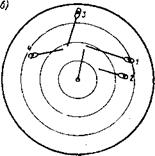
САРП первого вида изображают на экране индикатора ситуации предсказанные зоны опасности,* построение которых производится следующим образом (рис. 20.1). По параметрам относительного движения и введенным данным о курсе и скорости судна-наблюдателя вычисляются курс и скорость цели. В дальнейшем в зависимости от относительной позиции цели определяются опасная ЛОД (на рис. 20.1 ЛОД0, курс судна-наблюдателя, который может привести к столкновению, и предполагаемая точка столкновения на линии курса цели. В зависимости от заданной оператором безопасной дистанции расхождения определяются безопасные ЛОД, касательные к £зад; курсы судна-наблюдателя /Сн2 и /Снз. приводящие к расхождению на Оэад и точки Р2 и Р3 пересечения судном-наблюдателем линии курса цели по носу и по корме у нее при безопасных ЛОД. Параллельно линии курса цели в обе стороны от нее проводятся линии в расстоянии £>3«д. В полученную фигуру вписывается эллипс или шестиугольник, представляющие район опасности. На экране индикатора (рис. 20.2) отображаются сопровождаемые цели (две черточки у эхо-сигнала — строб сопровождаемой цели), линии их курсов и предсказанные районы опасности. Если курсовая черта своего судна пересекает предсказанный район опасности, значит DKP<cD3tA. Для избежания чрезмерного сближения надо вывести курсовую черту своего судна из районов опасности. Этот вид представления информации запатентован и используется в САРП фирмы «Сперри».
На судах Минморфлота САРП фирмы «Сперри» можно встретить очень редко. Однако в некоторых отечественных САРП имеется дополнительный режим секторов опасных курсов. В этом режиме на периферии индикатора САРП с векторным представлением информации дополнительно рисуются дуги, соответствущие секторам, в которых есть районы опасности (районы опасности на экране не показываются). Этот режим используется как вспомогательный. Чрезмерное доверие к нему и маневрирование только на основании секторов опасных курсов могут быть опасными.
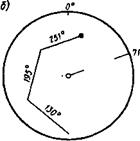
Наиболее широко распространены САРП второго вида. На рис. 20.3 показан индикатор ситуации САРП с векторным представлением информации в режимах индикации ЛОД и линий истинного движения (ЛИД) в одной и той же ситуации. На экране отображаются символы сопровождаемых целей (в данном случае в виде корабликов, ориентированных по курсам целей), а также по усмотрению оператора векторы относительного или истинного движения за время прогноза, устанавливаемое оператором. Конец каждого вектора показывает позицию цели в относительном или истинном движении через интервал времени, равный заданному времени прогноза. К данному виду САРП относятся устанавливаемые на судах Минморфлота отечественные
|
 опасности:
опасности:
 а — до маневра своего судна; б — после маневра своего судна для расхождения на безопасной дистанции
а — до маневра своего судна; б — после маневра своего судна для расхождения на безопасной дистанции

|
Рис. 20.3. Векторное представление информации на индикаторе ситуации*а ~ врежиме индикации ЛОД;б— в режиме индикации ЛИД
САРП «Бриз», «Бриз-Е», «Океан-С», а также импортные «Дата Бридж» фирмы «Норконтрол» совместно с фирмой «Кельвин Хьюз», САРП фирм «Ракал-Декка», «Крупп-Атлас», «Селениа» и др.
20.3. Захват целей
Ручной захват. Захват целей в САР11 может осуществляться автоматически или вручную (автоматическая и ручная селекции целей). В САРП с автозахватом целей должен быть предусмотрен режим ручного захвата и сброса целей. Для ручного захвата необходимо подвести к эхо-сигналу координатный маркер так, чтобы эхо-сигнал оказался в пределах строба, и нажать кнопку ввода. После этого у наблюдаемой цели появляется символ того» что цель взята на автосопровождение, и координатный маркер может быть убран. Аналогично, чтобы прекратить сопровождение цели, не представляющей интереса, и освободить соответствующий канал сопровождения надо подвести к цели координатный маркер и нажать кнопку сброса. Если цель наблюдается неуверенно (более т пропусков за п оборотов антенны), го она на сопровождение взята не будет. Это может происходить, например, если плохо отрегулировано радиолокационное изображение. Захват цели не будет произведен также при отсутствии свободного канала сопровождения. В этом случае необходимо сбросить одну из сопровождаемых целей и повторить захват интересующей судоводителя цели. Если несколько целей наблюдаются на одном пеленге, то захват очередной цели может быть произведен только после выработки данных по предыдущей захваченной цели, что приводит к'существенной задержке в получении информации о движении всех целей. Достоинством ручного захвата является избирательность информации, так как сопровождаются и отображаются на экране индикатора только те цели, которые действительно необходимы. В этом режиме исключается захват ложных эхо-сигналов, помех, поэтому в условиях большого количества помех он предпочтительнее.
Недостатком ручного захвата является необходимость затрат времени оператора на захват и сброс целей, и следовательно, неизбежное отвлечение оператора от анализа обстановки и принятия решений на выполнение чисто механических операций.
Надо отметить также, что оператор не всегда может достоверно опознать, какие цели представляют интерес, а какие нет. Может получиться так, что при плавании в недостаточно знакомом районе оператор использует все имеющиеся каналы сопровождения на детали берега (скалы, островки), стоящие на якоре или неопасные суда и к моменту появления действительно нужной цели (например, выходу парома из порта) не будет иметь свободного канала. Потребуется время выбрать наименее интересную из сопровождаемых ц^лей, снять ее с сопровождения и только после этого произвести захват новой цели. Для избежания подобных ситуаций на судах, использующих САРП с ручным захватом, при подходе к проливу, узкости, порту отбор целей для захвата производят по хвостам послесвечения на экране индикатора РЛС.
Оператор отбрасывает неподвижные цели, послесвечение которых параллельно курсу судна, и берет на сопровождение цели, ЛОДы которых направлены к центру экрана.
Так как в режиме ручного захвата обнаружение целей и взятие их на сопровождение осуществляются оператором, отвлечение его от индикатора ситуации на выполнение других штурманских обязанностей может привести к запоздалому обнаружению целей и соответственно, к запоздалому получению информации о степени опасности и элементах движения. Для дублирования оператора, особенно в период его отвлечения, могут быть использованы охранные кольца или зоны. Например, оператор устанавливает охранное кольцо на расстоянии 10 миль. При пересечении целью охранного кольца раздается сигнал тревоги, извещающий оператора о появлении цели. Получив такое извещение, оператор производит захват цели. Если такое охранное кольцо установлено на достаточном удалении, то будет резерв времени на захват цели, получение информации о ней, выбор и осуществление маневра, но малые суда с плохой отражающей способностью могут появляться впервые внутри кольца и их появление не будет отмечено сигналом тревоги. Поэтому, как правило, используют 2 кольца — одно на фиксированной дистанции и второе на переменной, выбираемой оператором. Следует подчеркнуть, что поскольку появляющиеся внутри кольца цели не отмечаются системой предупредительной сигнализации, такую систему нельзя рассматривать как вариант равноценного систематического наблюдения. В зависимости от района плавания и ситуации необходимо обеспечить или минимальное отвлечение оператора от САРП, или непрерывное наблюдение, усилив своевременно ходовую вахту.
Автозахват. В этом режиме каждая вновь появляющаяся цель автоматически захватывается и берется на сопровождение. Достоинствами автоматического захвата являются освобождение оператора от часто повторяющихся механических операций по вводу и сбросу целей, а также более быстрое получение информации о цели после ее появления (так как захват производится сразу после появления цели).
Автозахват может осуществляться при пересечении целью охранного кольца («на кольце») или во всей зоне обзора («по полю»). При использовании автозахвата «на кольце» имеется большая вероятность появления целей внутри кольца и, следовательно, пропуска целей. Все ограничения, свойственные использованию охранных колец и рассмотренные ранее, полностью относятся к автозахвату «на кольце». Автозахват «по полю» имеет существенно меньшую вероятность пропуска целей.
Недостатком работы в режиме автозахвата является избыток информации на экране индикатора ситуации, где наблюдается больше векторов, чем это необходимо в конкретной ситуации. При интенсивном движении возможно переполнение каналов сопровождения, когда общее количество целей превышает количество сопровождаемых. В этом случае могут возникать сомнения в приоритете сопровождаемых целей — наряду с сопровождаемыми не представляющими интерес целями могут оказаться не захваченными цели, представляющие интерес, но находящиеся, например, в большей дистанции от своего судна.
При плавании вблизи берегов непротяженные детали берега классифицируются, как точечные цели и «забивают» каналы сопровождения и экран индикатора ситуации. Применение автозахвата предъявляет повышенные требования к помехозащищенности САРП, поскольку помехи могут также «забивать» каналы сопровождения и вносить дезинформацию на экран индикатора ситуации в виде хаотично появляющихся и исчезающих целей с изменяющимися элементами движения и степенью опасности.
С целью компенсации указанных недостатков в различных САРГ1 принимаются (частично или в полном объеме) следующие меры.
1. На экран индикатора ситуации подаются векторы не всех сопровождаемых целей, а только части из них. При этом, как правило, используется следующая система приоритетов:
а) в первую очередь индицируются цели, имеющие DKP<,Dmm и *кр<С*т1п (опасные дели);
б) во вторую очередь — цели, имеющие DKP<.Dm\n и *Кр>*пчп, т. е. цели, имеющие опасные ЛОД, но с большим промежутком времени до кратчайшего сближения;
в) остальные цели в порядке возрастания дистанции до них.
2. Оператором устанавливается максимальная дистанция захвата, за пределами которой автозахват и сопровождение целей не производятся. Этим достигается исключение сопровождения удаленных целей.
3. Оператором устанавливается минимальная дистанция захвата, ближе которой автозахват не производится. Ранее захваченные цели продолжают сопровождаться и после входа в установленную зону. Этим достигаются исключение захвата и сопровождения помех от волн.
4. Оператором устанавливается сектор автозахвата. Например, 90° по курсу (по 45° слева и справа) или 180° (по 90° слева и справа). Этим достигается избирательность информации в наиболее интересующих судоводителя и наиболее опасных направлениях.
5. Оператор устанавливает линии запрета автозахвата, за преде- лами которых автозахват и сопровождение целей не производятся. Этим достигаются исключение автозахвата и сопровождения деталей береговой черты, стоящих на якоре вблизи берега судов, судов прибрежного плавания.
6. Автоматический сброс с сопровождения целей в наименее опасном секторе зоны при переполнении каналов сопровождения с целью захвата вновь появляющихся целей в других секторах зоны.
7. Автоматический сброс сопровождения расходящихся целей, имеющих D>Dmm и *„р<0. Этим достигаются исключение удаляющихся целей и освобождение каналов сопровождения для приближающихся целей.
8. Световая и звуковая сигнализации о переполнении, срабатывающая при использовании последнего свободного канала сопровождения. #
Во всех случаях ограничения автозахвата на экране индикатора ситуации должны быть обозначены зоны, в которых автозахват не производится. На рис. 20.4 показан индикатор ситуации при использовании максимальной и минимальной дистанции автозахвата и линий запрета автозахвата. На рис. 20.5 показан индикатор ситуации с автоматическим сбросом целей в наименее опасном секторе зоны.
В ряде САРП в режиме автозахвата так же, ка^к в режиме ручного захвата, при нахождении нескольких целей на одном пеленге очередная цель может быть захвачена только после обработки и выдачи данных о движении предыдущей захваченной цели, т. е. значительно позже ее появления.
Различные конструкции САРП отличаются друг от друга алгоритмами обнаружения и захвата целей. Для грамотного и безопасного использования САРП судоводитель должен четко знать критерии обнаружения и автозахвата, заложенные в конкретную САРП, установленную на судне.
Рис. 20.4. Использование линий запрета Рис. 20.5. Использование сектора автоавтозахвата матического сброса целей при переполнении каналов сопровождения
Ограничения захвата. Судоводитель должен при использовании САРП учитывать как ограничения, свойственные РЛС, так и дополнительные ограничения, накладываемые САРП. Ограничения, накладываемые РЛС, следующие.
1. Эффективная дальность обнаружения зависит ог мощности передатчик*, высоты антенны, чувствительности приемника РЛС, используемой частоты. Следует учитывать, что эффективная дальность обнаружения может уменьшаться вследствие характеристик среды (туман, дождь, волны, субрефракция), качки судна и может быть неодинаковой в различных направлениях.
2. Если САРП не представляет собой автономную радиолокационную систему, а сопрягается с серийчой РЛС, то установленная на РЛС шкала дальности накладывает ограничения на работу САРП. Если на РЛС установлена шкала дальности меньше, чем на САРП, то за пределами шкалы, установленной на РЛС, экран индикатора ситуации будет затемнен. Если в РЛС установлена шкала больше, чем в индикаторе САРП, то наблюдается некоторое ухудшенное изображение на экране индикатора ситуации за счет деления частоты запуска развертки. Рекомендуется устанавливать на РЛС и индикаторе САРП одинаковые шкалы дальности.
3. Разрешающая способность РЛС по пеленгу и дальности зависит от шкалы дальносгн, используемой частоты, диаграммы направленности антенны. Цели на расстояниях, меньших разрешающей способности РЛС, будут восприниматься и обрабатываться САРП как одна цель.
4. При неправильной настройке органов управления РЛС ухудшаются ее эксплуатационные свойства, следовательно, и функционирование САРП. Так, в частности, пониженное усиление приводит к уменьшению дистанции обнаружения и захвата целей. Повышенное чрезмерно усиление приводит к ухудшению разрешающей способности РЛС и способствует смене целей (переходу каналов сопровождения с цели на цель) при расхождении целен между собой на близких рас- c. тяниих.
5. Наличие мертвой зоны и теневых секторов РЛС ограничивает возможность обнаружения и захвата целей САРП.
6. Ложные эхо-сигналы и помехи воспринимаются САРП как точечные сигналы, берутся на сопровождение и вносят дезинформацию на индикатор ситуации:
а) помехи от волн возникают вблизи центра развертки и могут быть уменьшены соответствующей установкой ВАРУ; следует помнить, что ВАРУ ослабляет не только помехи, но и полезные эхо-сиг- налы на малых расстояниях — при чрезмерном введении ВАРУ мертвая зона может существенно превышать конструктивную;
б) помехи вследствие осадков могут быть уменьшены применением малой постоянной времени (МПВ) или переключением на диапазон 10 см; за полосой дождя вследствие рассеивания энергии излучения цели могут не обнаруживаться — в этом случае единственным разумным выходом будет снижение скорости судна;
в) ложные эхо-сигналы могут возникать при нахождении крупного объекта на близком расстоянии (до 4—6 миль) вследствие приема отраженного сигнала боковым лепестком диаграммы направленности в горизонтальной плоскости, они располагаются по дуге, а на очень близких расстояниях — кольцом в той же дальности, что и объект; остаются неподвижными при маневре своего судна;
г) ложные эхо-сигналы от крупных объектов могут возникать вследствие переизлучения близкими к антенне РЛС деталями своего судна (мачта, труба); они расположены по радиусу в направлении переизлучающего предмета, разворачиваются вместе с меткой курса;
д) ложные эхо-сигналы могут возникать вследствие приема на данном периоде отражений от зондирующего импульса предыдущего периода (при сверхрефракции, образовании атмосферного волновода);
ж) помехи могут возникать вследствие приема зондирующих импульсов других РЛС того же диапазона.
Дополнительные ограничения, вносимые САРП, следующие.
1. В алгоритмах САРП предусмотрен запрет захвата точечных объектов за линией береговой черты. Так как любой протяженный объект классифицируется САРП как береговая черта, обнаружение и захват целей за дуговой помехой от элементов судна в теневом секторе и за дуговым ложным эхо-сигналом от принятого боковым лепестком отражения большого объекта на близком расстоянии не производятся. Поэтому требование бестеневого размещения антенн РЛС, сопрягаемых с САРП, должно выполняться неукоснительно. Как береговая черта может классифицироваться и отражение от полосы дождя.
2. В алгоритмах САРП предусматривается автоматический сброс сопровождения целей при т пропусках за п оборотов антенны. Поэтому возможна ситуация, когда слабый эхо-сигнал, появляющийся на экране индикатора РЛС и визуально обнаруживаемый судрводителем, воспринимается САРП как помеха и не берется на сопровождение.
3. САРП имеет ограниченное количество каналов Сопровождения. За пределами этого количества цели, наблюдаемые на экране РЛС, обнаруживаться и сопровождаться САРП не будут.
20.4. Сопровождение целей
Сопровождение неманеврирующей цели. Каждая сопровождаемая цель обозначается на экране индикатора ситуации символом сопровождаемой цели. В различных САРГ1 приняты различные символы: кружок, кораблик, две черточки у эхо сигнала и т. д. При каждом обороте антенны сравниваются координаты центра цели с координатами центра ее строба. Строб перемещается в позицию цели, уточняются составляющие вектора относительной скорости цели. В промежутке между поступлениями информации о положении цели строб перемещается с вычисленной ранее относительной скоростью цели, оказываясь к моменту облучения цели в предсказанной ее позиции. Чем увереннее сопровождается цель, тем меньше ее строб. В ряде САРП имеется возможность оператору вывести на экран индикацию строба и видеть изображение строба и динамику изменения его величины. Обычно это используется при захвате слабо различимых целей, чтобы убедиться в ее уверенном сопровождении. Нахождение цели внутри строба и уменьшение величины строба от развертки к развертке показывает, что цель сопровождается уверенно.
Маневр цели. Вычисленные параметры относительного движения цели сопоставляются с предыдущими значениями этих параметров. Если расхождения превышают предельную случайную погрешность, фиксируется маневр цели. В этом случае может быть введена предупредительная сигнализация, например мерцание символа и вектора цели, включение светового табло «Маневр цели». Эта сигнализация может сопровождаться звуковой сигнализацией для привлечения внимания оператора. В частности, такая предупредительная сигнализация мо жет быть использована при стоянке судна на якоре. В этом случае маневр (начало движения) стоящего на якоре поблизости судна может свидетельствовать как о съемке этого судна с якоря, так и о появлении дрейфа на якоре у этого судна или у судна-наблюдателя. Обнаруживаемый САРП маневр неподвижного объекта (буя, маяка, скалы) также является следствием дрейфа или значительного разворота судна-наблюдателя.
Потеря цели. Если на одной из разверток цель в пределах строба не обнаружена, то система сопровождения продолжает поиск в течение последующих 5 оборотов антенны. При этом строб цели перемещается с вычисленными ранее параметрами относительного движения, постепенно расширяясь с каждым обзором. Если в результате этого поиска цель не обнаружена, включается предупредительная сигнализация, а последнее наблюдавшееся положение цели отмечается на экране. При этом подается звуковой сигнал для привлечения внимания оператора, включается световое табло «Потеря цели», мерцающим символом отмечается последняя наблюдавшаяся позиция цели на экране индикатора.
Потеря цели может произойти вследствие ослабления отраженного целью сигнала (удаление цели, изменение ее ракурса), входа цели в зону интенсивных помех, в радиолокационную тень другого объекта, в теневой сектор или за ложный дуговой эхо-сигнал, резкого маневра цели. В последнем случае в режиме автозахвата потерянная цель будет захвачена повторно как вновь появившаяся цель.
Смена цели. При прохождении целей на близком расстоянии друг от друга, когда стробы целей частично перекрывают друг друга, может происходить смена цели — переход строба с менее сильного на более сильный эхо-сигнал. Смене целей может способствовать попадание одной цели в радиолокационную тень другой цели. После расхождения целей одна из них сопровождается двумя каналами сопровождения, а вторая не сопровождается. В режиме автозахвата вторая цель будет захвачена повторно как новая цель. Особенно опасна смена цели в
режиме ручного захвата, так как в отличие от потери дели в этом случае предупредительная сигнализация не срабатывает (поскольку канал ее сопровождения продолжает быть занятым другой целью) и дальнейшее перемещение потерянной цели оказывается неконтролируемым. Особенно часто смена цели происходит при работе РЛС в 10-сантиметровом диапазоне, так как стробы целей в этом случае значительно больше, чем при работе в 3-сантиметровом диапазоне волн. Наблюдая близко проходящие друг от друга цели, особенно при работе в 10-сантиметровом диапазоне, оператор должен быть готов осуществить перезахваг цели в случае перехода вектора от одной цели к другой.
Цель, сопровождаемая двумя каналами, будет иметь два вектора, один из которых будет ложным, так как в сглаживании участвуют параметры обеих целей и дополнительно учитывается смещение строба при смене цели как поправка к ее относительному движению. Оба вектора сольются только после полного периода сглаживания. На 10- сантиметровом диапазоне это произойдет значительно позже вследствие больших флуктуаций положения максимума эхо-сигнала, а при наличии двух и более максимумов цель будет долгое время иметь два отличающихся друг от друга вектора. В современных САРП при близком прохождении двух целей отключается алгоритм сглаживания, т. е. какое-то время курсы и скорости этих целей считаются неизменными, что предотвращает смену целей.
Сброс цели. Йброс целей с сопровождения может осуществляться автоматически и вручную. Критерии автоматического сброса целей с сопровождения в различных САРП отличаются друг от друга. Как правило, автоматически сбрасываются с сопровождения следующие цели:
цели, вышедшие за пределы диапазона сопровождения; удаляющиеся на кормовых курсовых углах в дистанции, более некоторой заданной.
Для ручного сброса необходимо навести координатный маркер на цель и нажать кнопку «Сброс». Во многих САРП координатный мар- кер может быть наведен на цель также неоднократным нажатием кнопки «Формуляр». При каждом нажатии маркер перепрыгивает с цели на цель в порядке очередности их захвата.
В режиме автоматического захвата цель также может быть сброшена с сопровождения вручную. Однако если цель наблюдается уверенно и не сопровождается другим каналом сопровождения, она будет повторно взята на сопровождение системой автозахвата.
20.5. Оценка опасности столкновения
Прогнозирование позиций судов в режиме ЛОД. Если САРП работает в режиме ЛОД, то у всех сопровождаемых целе^й высвечиваются на экране индикатора ЛОД за установленное оператором время прогноза. Увеличивая время прогноза, оператор удлиняет все ЛОД и, сопоставляя расстояния от своего судна до ЛОД (используя НКД), оценивает предполагаемую дистанцию расхождения DKP. Зная время прогноза, оценивает /Кр. Время прогноза может меняться оператором произвольно (с интервалом 1 мин) или принимать фиксированные значения (например, 15 мин и 30 мин) в зависимости от типа САРП. Время прогноза высвечивается на световом табло или непосредственно на экране индикатора. Если ЛОД двух целей одновременно прихо-
|
 Рис. 20.6. Оценка опасности столкновения (шкала 8 миль, время прогноза 18 мин):а — в режиме индикации ЛОД; б в режиме индикации ЛИД
Рис. 20.6. Оценка опасности столкновения (шкала 8 миль, время прогноза 18 мин):а — в режиме индикации ЛОД; б в режиме индикации ЛИД
дит в одну точку, эти цели сближаются между собой опасно и следует ожидать их маневров.
В режиме ЛОД свое судно вектора не имеет, на периферии экрана черточкой отмечен курс своего судна. Оценивая приведенную на рис.
20.6 обстановку, можно определить для судна 1 DKP»0, fKP«18 мин; для судна 2 Дфж18 кб, /,ф«15 мин; для судна 3 DKp~20 кб, 16 мин; для судна 4 DK1,» 18 кб, /,ф«27 мин.
Суда 3 и 4 сближаются опасно между собой.
Как правило, во всех САРП режим ЛОД используется без смещения центра развертки. Однако есть САРП (очень немногочисленные), в которых центр смещается по линии курса своего судна. В этом случае надо быть осторожным, чтобы избежать возможной ошибки интерпретации, так как ЛОД не совпадают с хвостами послесвечения.
В тех САРП, где символы имеют форму кораблика, а не окружности, можно в режиме ЛОД оценить и ракурсы целей.
Режим ЛОД является наиболее удобным для оценки опасности сближения. Он позволяет наглядно и достаточно точно определить DKр непосредственно с экрана индикатора ситуации. Единственные погрешности при формировании векторов ЛОД — это погрешности системы сопровождения.
Прогнозирование позиций судов в режиме ЛИД. В этом режиме все цели и свое судно имеют векторы ЛИД, показывающие, где будут все суда через время прогноза. Увеличивая время прогноза, оцениваем степень опасности столкновения. Из рис. 20.6,6 в ситуации, аналогичной рис. 20.6, д, видно, что опасность представляет судно /, с которым свое судно приходит одновременно через 18 мин в одну точку. Судно 2 не опасно, так как свое судно проходит по носу у него. Суда 3 и
4 сближаются между собой опасно и следует ожидать их маневрирования.
В режиме ЛИД дистанция и время расхождения оцениваются более приближенно, чем в режиме ЛОД. Кроме того, по сравнению с векторами ЛОД при формировании векторов ЛИД дополнительно вносятся погрешности вследствие погрешностей курса и скорости своего судна, которые могут оказать существенное влияние на оценку степени опасности расхождения. Поэтому оценка степени опасности столкновения не должна основываться только на сведениях об истинном движении. Оценивая степень опасности по ЛИД, надо дополни
тельно или переключить в режим ЛОД или использовать цифровую информацию о DKP и tKР.
Поскольку, как правило, режим ЛИД используется в САРП без смещения центра развертки (т. е. высвечиваются векторы ЛИД, но эхо-сигналы и символы перемещаются по ЛОД), следует помнить, что продолжение послесвечеиия (если оно есть) представляет собой линию относительного движения, хотя и установлен режим ЛИД.
Использование цифрового формуляра. Для определения DHp и /кр интересующей судоводителя цели необходимо вывести на индикацию ее формуляр. Для этого последовательным нажатием кнопки «Формуляр» или перемещением маркера (в зависимости от типа САРП) наводят координатный маркер на нужную цель, а на панели управления переключают формуляр в положение «Дистанция — Время» (если данные формуляра индицируются попарно). Значения DKp и tKP высвечиваются на экране индикатора или на специальном цифровом табло.
Как правило, цифровой формуляр используется совместно с режимами ЛОД или ЛИД. С целью контроля, исключения промахов оператора (например, перепутывания ЛИД и ЛОД) целесообразно всегда при оценке опасности столкновения использовать два разных режима (обычно ЛИД или ЛОД и цифровой формуляр).
Предупредительная сигнализация. В САРП предусмотрена оценка опасности столкновения путем сравнения DKP и /КР каждой цели с заданными оператором с пульта управления допустимыми значениями Dmin и *т!П. Цели, имеющие DKp<Dmi,i и tKP<.tmin, классифицируются, как опасные цели. Если до этого цель не имела признака опасной цели, она классифицируется, как новая опасная цель. По признаку новой опасной цели срабатывает следующая предупредительная сигнализация: мерцает или отмечается повышенной яркостью символ и вектор цели или дополнительно к символу сопровождения цель обозначается символом опасности, загорается светящаяся кнопка «Опасная цель», включается звуковая сигнализация. После того как оператор, посмотрев на экран индикатора и обнаружив новую опасную цель, нажмет кнопку «Опасная цель», звуковая сигнализация и подсветка кнопки отключаются и цель переводится из разряда «Новая опасная цель» в разряд «Опасная цель». Символ опасности или мерцание вектора цели на экране индикатора продолжают отмечать цель до тех пор, пока она не перестанет быть опасной. Если в процессе маневрирования эта цель перестанет быть опасной, а потом вновь станет опасной, она будет снова классифицироваться, как новая опасная цель.
Задержки в оценке опасности столкновения. После захвата цели требуется определенное время для накопления информации о цели и вычисления относительных курса и скорости цели DKp и tKP. Поэтому первоначально у цели появляется символ сопровождения без вектора ЛОД или ЛИД. Согласно требованиям ИМО, не позднее чем через 1 мин вычисляются предварительные, имеющие большую погрешность значения /Со, V» и /)кр. Постепенно данные уточняются, и через 3 мин вычисленные значения Ко и V0 (для построения вектора ЛОД), Км и 1/ц (для построения вектора ЛИД) должны удовлетворять требованиям ИМО, предъявляемым к точности выдаваемой САРП информации. Таким образом, только через 3 мин после захвата цели судоводитель имеет возможность достоверно оценить степень опасности столкновения.
Такое же время требуется на получение достоверной информации о DкР и /Кр после маневра своего судна или маневра цели.
При маневре курсом или, особенно, скоростью, предпринятом своим судном или целью, ЛОД представляет собой криволинейную траекторию. Система сопровождения будет в этом случае давать некоторые осредненные за время сглаживания (около 1 мин 15 с) промежуточные значения относительного курса и относительной скорости, что внесет погрешность в вычисляемые значения /)кр и ^кр> Понадобится около 3 мин после окончания маневра, чтобы стабилизировать вычисляемые значения DKP и /кр. Маневр по расхождению должен выполняться заблаговременно с тем, чтобы с учетом задержек в получении информации от САРП проконтролировать эффективность предпринятых действий и в случае необходимости скорректировать их.
Точность определения DKp и /кр. На точность определения £>кр и /Кр влияют погрешности в определении пеленга и дистанции до цели вследствие погрешностей РЛС и погрешностей алгоритма обработки информации на ЭВМ.
Погрешности измерения пеленга возникают вследствие следующих причин: бортовой качки, флуктуации центра отражения цели, асимметричности диаграммы направленности антенны в горизонтальной плоскости, мертвого хода антенны, погрешностей гирокомпаса, азимутальной погрешности квантования.
Погрешности измерения дистанции возникают вследствие бортовой качки судна, наклона переднего фронта эхо-сигнала, погрешности квантования.
Наличие рассмотренных погрешностей приводит к погрешности в определении £>КР и *Кр. Эти погрешности будут зависеть от расстояния до цели, ее ракурса, курсового угла на цель, скорости относительного сближения. В технических требованиях ИМО к САРП приведены требования к точности САРП для четырех случаев взаимного расположения судов. Обобщая эти требования, можно сделать следующий вывод. При нахождении цели в D=8 миль и при времени до кратчайшего сближения *Кр«24 мин (т. е. для средних условий) САРП должны определять DKр с предельной погрешностью 1,3—2 мили через 1 мин после захвата цели и 0,5—0,7 мили через 3 мин. Меньшие значения соответствуют нулевому курсовому углу цели и нулевому ее ракурсу (встречное судно). Большие значения соответствуют курсовому углу 45е и ракурсу цели 90° (сходящиеся курсы своего судна и цели).
Приведенные величины показывают, что несмотря на высокую точность обработки данных на ЭВМ, вследствие погрешностей датчиков, в первую очередь погрешностей радиолокационного оборудования, погрешности в определении DKP достигают значительных величин.
Чрезмерное доверие к выдаваемым САРП данным, расхождение с судами по данным САРП на очень малых расстояниях может привести к опасности столкновения.
20.6. Анализ ситуации и выбор маневра
Получение информации об элементах движения цели. Элементы движения цели могут быть приближенно определены глазомерно с экрана индикатора ситуации, работающего в режиме ЛИД. Курс цели определяется по направлению ЛИД, а скорость примерно сопоставлением длины вектора цели с длиной вектора свого судна.
На индикаторе ситуации, использующем в качестве символов ориентированные по Кц кораблики, оценка ракурса цели может быть произведена и в режиме ЛОД.
В случае необходимости данные о курсе и скорости цели могут быть запрошены в цифровой форме вызовом на индикацию формуляра этой цели и переключением его в положение «Курс — Скорость» (если данные формуляра индицируются попарно). Запрос цифровых данных о курсе и скорости цели может быть применен, например, когда ожидается маневр цели с тем, чтобы его зафиксировать раньше (определить сторону изменения курса цели).
Обнаружение маневра цели. Маневр цели может быть обнаружен в процессе систематического наблюдения за ЛИД или ЛОД цели или выведенными на формуляр цифровыми данными о £>кр, *кр или /Сц, Vu. Следует иметь в виду, что изменение направления ЛОД цели не всегда свидетельствует об изменении ее курса, направление ЛОД меняется и при изменении скорости цели.
Для обнаружения маневра цели могут использоваться также хранящиеся в памяти ЭВМ данные о предыдущих позициях цели. К стандартным САРП предъявляется требование по запросу воспроизвести на экране по крайней мере 4 предшествующих позиции любой цели, сопровождаемой не менее 8 мин. Временной интервал между этими позициями должен быть одинаковым. Предшествующие позиции можно показать как в режиме ЛИД, так и в режиме ЛОД. Важно помнить, что предыдущее поведение цели может некоторым образом указать на ее намерения. Так, если цель совершила маневр для расхождения с другой целью, можно предположить, что в ближайшем будущем она может возвратиться к прежним элементам движения.
В некоторых САРП имеется возможность использовать предупредительную сигнализацию, включающуюся при резком изменении элементов движения цели. В этом случае на экране мерцает вектор маневрирующей цели (символ в отличие от опасной цели не мерцает) и загорается кнопка «Маневр цели».
Точность определения элементов движения цели. Дополнительно к погрешностям, рассмотренным в п. 20.5, на точность расчета курса и скорости цели влияют погрешности датчиков курса и скорости своего судна. Значительные случайные погрешности в определение курса и скорости цели вносит существенное несовпадение курса и скорости перемещения антенны РЛС с курсом и скоростью судна за период 1 оборота антенны. При частоте вращения антенны 16 об/мин период по- ступлниея информации о цели составит 3,75 с. За это время судно, имеющее скорость 16 уз, пройдет около 30 м. Вследствие бортовой качки с 0=10° антенна РЛС может сместиться перпендикулярно курсу до 5 м. Примерно такое же поперечное смещение антенны возникает вследствие рыскания судна при расположении антенны в кормовой части судна. Вследствие этого фактическое перемещение антенны РЛС может существенно отличаться от перемещения центра тяжести судна. При расчете /Сц и Vn к вектору относительной скорости цели (по отношению к антенне РЛС) прибавляется вектор скорости центра тяжести судна, а надо бы прибавлять вектор скорости антенны (который неизвестен). Возникающие вследствие этого существенные погрешности сглаживаются в ЭВМ специальным алгоритмом, принимающим в учет 18—20 последовательно полученных значений Кц и Vn. Вследствие этого погрешности сглаженного значения /Сц и Vtt становятся существенно меньше, но все равно достигают 3—7° для курса и 0,8—1,2 уз для скорости цели.
Оценка ситуации с использованием ЛИД менее достоверна, чем при использовании ЛОД или цифрового формуляра 0Кр И ^кр*



Рис. 20.7. Ошибки интерпретации при использовании абсолютного лага:
в —ситуация сближения в море; б — индикатор ситуации с относительным лагом (режим ЛИД); а — индикатор ситуации с абсолютным лагом (режим ЛИД)
На определение курса и скорости цели существенно влияет выбор датчика скорости: относительный или абсолютный лаг. Для целей расхождения судов в море подача на САРП информации от абсолютного лага представляет опасность и не столько с точки зрения точности, сколько с точки зрения возможных погрешностей интерпретации ситуации. Например, при использовании двухкоординатного абсолютного лага в случае расхождения со встречной целью на течении, направленном в борт судна, на экране индикатора вместо ситуации расхождения на встречных курсах будет наблюдаться ситуация пересекающихся курсов. Это может привести к неверной оценке ситуации и выбору неверного маневра, например попытке разойтись со встречным судном уменьшением скорости (рис. 20.7).
Особенности работы в режиме проигрывания маневра. Проигрывание маневра достигается путем введения предполагаемого курса своего судна и его предполагаемой скорости, а также временной задержки от проигрывания маневра до его осуществления. При включении режима проигрывания, маневра ЭВМ продолжает сопровождение целей и обычную работу по расчету фактических DKP, tKP, но на экран индикатора подается не фактическая обстановка, а предполагаемая после осуществления маневра. Учитывая опасность принять прогнозируемую ситуацию за развивающуюся фактически, в САРП предусматривается ряд мер, направленных на предупреждение подобной ошибки. Кнопка «Имитация маневра» часто делается подпружиненной, так что при ее отпускании сразу подается на экран фактически развивающаяся ситуация, или зажигается табло «Имитация маневра».
Метод изображения при проигрывании маневра может быть статическим и динамическим. В первом случае изображаются векторы относительного движения, которые будут результатом предполагаемого маневра. Во втором случае все сопровождаемые суда и свое судно заставляют перемещаться со скоростью, во много раз больше реальной (примерно в 30 раз), показывая в каждом из промежуточных положений промежуточные ЛОД. Проигрывание маневра может осуществляться и в режиме ЛИД. При проигрывании маневра учитываются задержка времени до выполнения маневра и динамические свойства судна. Судоводитель, наблюдая за предполагаемым развитием ситуации, подбирает необходимое изменение курса и (или) скорости своего судна. В момент отпускания кнопки «Имитация маневра» ЭВМ запоминает последние значения предполагаемых курса и скорости своего судна. Спустя предварительно установленное судоводителем время за
держки загорается табло «Начать маневр», и высвечиваются значения /Си» и VKU которые были подобраны в режиме имитации маневра.
Автоматический выбор маневра. В ряде САРП предусмотрен автоматический выбор маневра курсом по расхождению на заданной дистанции. В этом случае судоводитель задает дополнительно сторону изменения курса. ЭВМ вычисляет автоматически необходимое изменение курса и показывает на экране развитие ситуации в случае осуществления выбранного маневра. Окончательное решение на осуществление предложенного ЭВМ маневра принимает судоводитель.
Возвращение к прежним элементам движения. Как и при маневре на расхождение, перед маневром по возвращению и прежним элементам движения необходимо использовать устройство проигрывания маневра. Следует помнить, что этот маневр также должен быть своевременным, решительным и заметным.
Встречающаяся практика возвращения на прежний курс по этапам путем «обхода вокруг цели» затрудняет возможность наблюдателя на других судах четко определить маневр. Такую практику следует считать несоответствующей МППСС-72 и хорошей морской практике.
20.7. Навигационное использование САРП
Сопровождение неподвижных объектов. САРП могут быть взяты на сопровождение неподвижные точечные объекты (плавмаяки, буи, небольшие островки). В ряде САРП имеется также возможность непрерывного сопровождения приметных деталей протяженных объектов (например, мысов, волноломов и т. д.). Выводя на формуляр данные о пеленге и дистанции сопровождаемого объекта судоводитель имеет возможность непрерывно контролировать эти навигационные параметры, своевременно корректировать движение своего судна, например, при осуществлении поворота на новый кур'с по радиолокационному пеленгу и дистанции или плавании в узкости с использованием нанесенной на карту сетки пеленгов и дистанций.
Целесообразно использовать САРП и для обычных навигационных определений, так как навигационные параметры измеряются САРП точнее, чем оператором РЛС.
Привязка к наземным объектам. При плавании в районах с приливно-отливным течением изображения береговой черты неподвижных объектов будут смещаться на экране индикатора САРП, что может быть неудобно при навигационном использовании. В этом случае по результатам сопровождения неподвижных объектов могут быть определены параметры течения и введены соответствующие поправки. В ряде САРП имеется устройство автоматического ввода этих поправок.
Подключение этого устройства аналогично переходу от относительного лага к абсолютному и может привести к'неверному представлению ракурсов целей (см. рис. 20.7).
Метод параллельных индексов. В ряде САРГ1 имеются устройства для проведения линий через произвольные точки экрана индикатора ситуации. Эти линии могут быть использованы для проведения границ опасных зон (рис. 20.8) или параллельных индексов, по которым должен перемещаться приметный радионавигационный ориентир при движении судна по заданной траектории без отклонений. Параллельные индексы проводятся от навигационного ориентира и поворотных точек в сторону, противоположную курсу судна (рис. 20.9).
Рис. 20.8. Проведение ограничительных линий на экране индикатора:

 Л—отдельно лежащая банка: В — прибрежная отмель
Л—отдельно лежащая банка: В — прибрежная отмель
Рис. 20.9. Использование метода параллельных индексов:
а — прокладка на навигационной карте; б — траектория относительного перемещения плав* маяка на индикаторе ситуации
|
Электронные карты. В целом ряде САРП имеется возможность создания и хранения электронных карт. Для создания электронной карты в запоминающее устройство по координатам точек вводят рекомендованные пути, системы разделения, наиболее важные буи и плавмаяки. Стабилизация электронной карты осуществляется по выбранным оператором неподвижным точечным радиолокационным ориентирам. Хранение в памяти нескольких карт одновременно и их поочередный вызов на индикатор дают возможность перекрывать значительную часть маршрута перехода.
Наличие на экране электронной карты значительно упрощает не только обеспечение навигационной безопасности, но и общую оценку обстановки, включая учет предполагаемых маневров целей. В то же время вследствие используемой стабилизации относительно грунта при больших значениях сноса из-за ветра и течения возможна неверная оценка ракурсов целей.
20.8. Контроль за техническим состоянием САРП
Встроенный контроль. В большинстве САРП имеется устройство встроенного контроля, проверяющее работоспособность каждого печатного узла. В случае отсутствия сигнала в каком-либо узле на панели управления включаются звуковой и световой сигналы отказа. Звуковой сигнал отключается нажатием кнопки «Отказ». При этом, как
правило, производится дополнительный пуск программы. Если отказ был следствием случайного сбоя, звуковой и световой сигналы отказа выключаются и САРП начинает нормальную работу. Следствием такого отказа из-за случайного сбоя будет временное отсутствие информации о ЛОД и ЛИД целей, так как они будут захватываться и обрабатываться как вновь обнаруженные. Если работа велась в режиме ручного захвата, после сбоя необходимо повторить захват ранее сопровождавшихся целей.
Если после попытки дополнительного пуска программы продолжает подаваться сигнал «Отказ», необходимо устранение неисправности. При этом либо на индикаторе высвечивается номер вышедшего из строя узла, либо на торце соответствующего узла загорается сигнал, указывающий на его неисправность.
Следует иметь в виду, что встроенный контроль не обеспечивает 100 % гарантии обнаружения неисправной работы САРП, поэтому оператор должен использовать и другие способы контроля исправной работы САРП.
Тестовый контролы В большинстве САРП для проверки исправности и точности работы вычислительного комплекса предусматривается возможность включения контрольного теста: условной задачи с известными ответами. Правильность решения проверяется сопоставлением результатов решения с ответами или оператором по виду контрольного изображения на экране индикатора ситуации. Тестовый контроль проводится автоматически через определенный интервал времени (например, 1 ч) или включается по запросу оператора.
В период прохождения тестового контроля продолжаются нормальное функционирование САРП, сопровождение целей и вычисление данных. Если оператор нажатием кнопки «Тест» вызвал на экран контрольное изображение, сразу после отпускания этой кнопки (как правило, подпружиненной) на экране восстанавливается фактическая ситуация.
Контроль ввода данных. В САРП осуществляется контроль данных, вводимых автоматически или оператором. В случае потери данных, поступающих от лага и гирокомпаса, срабатывает предупредительная сигнализация. При ручном вводе проверяется соответствие данных установленным для данной САРП пределам и в случае несоответствия (например, ввод курса свыше 360°) ввод этих данных блокируется. Для исправления ошибки необходимо произвести сброс неверно набранных данных и повторить ввод.
Признаки нормальной работоспособности САРП. Оператор должен хорошо знать признаки нормального функционирования САРП во всех режимах работы с тем, чтобы своевременно заметить возможные отклонения. Основными признаками нормальной работы САРП являются:
наличие на экране индикатора вторичной информации (символы сопровождения, векторы, формуляр); 1
совпадение символов сопровождения с эхо-сигналами (если на индикатор подается и первичная информация);
устойчивость положения векторов;
соответствие направления векторов цифровому формуляру;
наличие подсветки сигнальных табло и клавиш и их нормальное функционирование.
Признаки нормальной работоспособности конкретных САРП приводятся в инструкциях по их эксплуатации.
Очень важным при эксплуатации САРП является знание оператором основных закономерностей относительного движения, видов ЛОД ' и тенденций их изменения при маневре судна-наблюдателя или цели. Подготовленный оператор в случае неправильного функционирования САРП должен своевременно заметить несоответствие выдаваемых САРП данных реальной обстановке. Поэтому курс «Радиолокационная прокладка и наблюдение» входит обязательной составной частью в подготовку оператора САРП.
Режим «Имитатор». В ряде САРП имеется режим моделирования нескольких ситуаций, в которых имитируются эхо-сигналы целей, движущихся по заданным траекториям. Этот режим используется как для контроля работоспособности САРП, так и для тренировки персонала.
20.9. Перспективы развития САРП
Повышение информативности индикатора ситуации. Во многих САРП предприняты или предполагается принять ряд мер, направленных на повышение информативности индикатора ситуации.
1. Переход от радиолокационной развертки к телевизионной позволяет осуществлять дневное наблюдение без тубуса, дает возможность установки нескольких мониторов на удаление от центрального прибора.
2. Применение цветного изображения дает возможность выделять различные типы целей различным цветом (точечная, протяженная, опасная, неподвижная и т. д.),
3. Увеличение количества изображаемых символов позволяет дифференцировать цели по виду принадлежащих им символов: неподвижный объект, движущийся обект, степень опасности сближения.
4. Применение нескольких размеров символов в зависимости от количества полученных от цели отраженных импульсов позволяет получать представление о величинах судов, с которыми осуществляется расхождение (маленький символ—небольшое судно, большой символ — крупнотоннажное судно).
5. Установка на судах активных радиолокационных ответчиков может позволить не только иметь более точную информацию о курсах и скоростях целей, но и иметь возможность опознования целей на экране индикатора ситуации. Имея на экране индикатора ситуации присвоенный цели помер, судоводитель может уточнить по радиотелефону намерения цели, согласовать маневрирование.
6. Разработка более совершенных алгоритмов оценки ситуации позволит все в большей степени перекладывать выбор маневра на САРГ1. Сейчас, как правило, маневр выбирает судоводитель, а САРГ1 прогнозирует последствия предполагаемых маневров. В дальнейшем возможно, что САРП будет предлагать судоводителям один или несколько маневров, давая некоторую обобщенную оценку их качества (с точки зрения безопасности, экономии топлива, ходового времени и т. д.). В этом случае судоводитель выбирает и утверждает маневр из числа предварительно намеченных САРП.
7. Внедрение автоматической записи радиолокационной информации с ее периодическим обновлением (например, запись последнего часа плавания) и привязкой ко времени позволяет восстанавливать обстоятельства аварийных случаев. Применение таких регистрирующих устройств, подобно «черному ящику» на самолетах, может стать обязательным требованием для ряда судов.
8. Применение специальных методов повышенной точности и ий- формативности для первичной обработки радиолокационных эхо-сигналов, внедрение импульсно-фазовой радиолокации позволят оперативно определять ракурс и вектор относительной скорости цели, что даст возможность многократно уменьшить время запаздывания информации о маневре цели.
Совмещение радиолокационной и навигационной информации. В некоторых САРП приняты меры к объединению всей навигационной информации на экране индикатора ситуации. В этом случае дополнительно к информации по расхождению судов оператор наблюдает на экране линию предварительной прокладки, ограничительные изобаты, символы приметных ориентиров на берегу. Вводится дополнительно сигнализация по навигационной безопасности движения судна, отклонениях от предварительной прокладки. Имеется возможность поручить вычислительному комплексу вывести судно на линию предварительной прокладки и удерживать на намеченном маршруте. Необходимая навигационная информация на переход вводится с магнитной кассеты или магнитного диска.
Если плавание осуществляется вне радиолокационной видимости берегов, характер информации на экране сохраняется, но место судна-наблюдателя определяется по скомплексированным данным спутниковых, фазовых и других радионавигационных систем, данным астрономических обсерваций. Одновременно регистрирующее устройство виосиг необходимые данные о курсе, скорости, месте судна и обсервациях в судовой журнал.
В перспективе возможна оперативная автоматическая корректура электронных карт по информации, получаемой от спутников связи.
[1] В этом разделе принята аббревиатура для режимов работы главного двигателя, отличающаяся от рекомендованной в НШС-82, так как последняя, по мнению автора, не отличается наглядностью.
Используемые сокращения получили распространение в ЧМП и других пароходст- вах южного бассейна.
Дата добавления: 2016-07-09; просмотров: 1619;