Устойчивость. Устойчивостью на курсе называется способность судна сохранять направление прямолинейного движения. Различают два вида устойчивости: собственную и эксплуатационную. 5 страница
/- остановка судна; // — запуск двигателя назад; III — команда «ПХЗ»; IV — команда «Право на борт»; V — команда «Стоп»
Таблица 5.1. Циркуляция вправо с рулем на борту (ПМм — право на борт)
|
Данные, приведенные в табл. 5.1, содержат как отсчеты, полученные при измерениях, так и рассчитанные по ним дистанции и прямоугольные координаты, приведенные к ЦТ судна.. Даны также углы отворота от начального курса ДК на каждый момент обсервации. Замеченные по секундомеру моменты пересчитаны относительно начала маневра. По рассчитанным прямоугольным кооргдинатам выполнена прокладка на планшете и получена траектория судна при выполнении циркуляции, показанная на рис. 5.3. На этом же планшете построены траектории судна при выполнении маневра пассивного торможения СПХ—ПХЗ. Для краткости данные траекторных измерений по двум указанным маневрам не приведены.
Начало координат для каждого маневра выбирается с таким расчетом, чтобы траектория разместилась в желаемом месте планшета. В рассматриваемом случае (см. рис. 5.3) для маневров пассивного и активного торможения использовано общее начало координат, а для циркуляции выбрано отдельное начало.
Составление судовой информации. Траектории циркуляций судна (см. рис. 5.3) получены по обсервациям, сделанным в произвольные моменты времени. Следовательно, и углы изменения курса в этих точках имеют случайные значения. *
Для получения точек с целочисленными значениями изменения курса и соответствующих этим значениям моментов* времени нужно выполнить приближенную интерполяцию между обсервациями, что позволит отметить нужные точки на траектории и рассчитать соответствующие им моменты времени. Таким путем легко получить все необходимые данные по поворотливости для включения в типовую форму судовой информации.
В принципе таким же способом можно построить и линейные графики торможения. Рекомендуется следующий порядок построения линейных графиков для каждого маневра торможения.
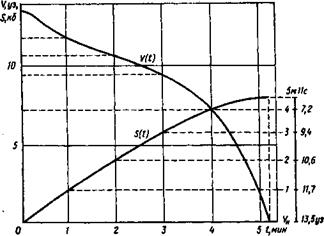 Рис. 5.4. Построение линейного графика торможения по графикам V(t) и s{t), полученным из натурных испытаний
Рис. 5.4. Построение линейного графика торможения по графикам V(t) и s{t), полученным из натурных испытаний
|
Сначала по обсервованным точкам построить в прямоугольных координатах с помощью лекал сглаженный график s(t). Затем, снимая с этого графика отрезки пути, через равные промежутки времени, например через 1 мин, рассчитать промежуточные значения скоростей и по ним построить график ,V(t). После этого, используя оба графика s(t) и V(t), легко яостроить линейный график торможения для включения в судовую информацию.
Построение линейного графика по данным траекторных измерений (см. рис. 5.3) для маневра СХП—ПХЗ показано на рис. 5.4.
5.3. Расчетное и экспериментально-расчетное определение элементов поворотливости
В теории корабля существуют аналитические методы количественного расчета элементов поворотливости, однако точность результатов таких расчетов обычно невысока. Это объясняется сложным и еще недостаточно изученным характером совместного влияния многочисленных факторов на поведение судна при выполнении поворотов, что заставляет обращаться к натурному эксперименту.
К настоящему времени в нашей стране и за рубежом накоплен значительный объем экспериментальных данных по поворотливости различных судов, в том числе в виде траекторий, полученных при выполнении циркуляций с различными углами перекладки руля.
На основе обработки таких экспериментов в разное время и разными авторами предложены эмпирические формулы для приближенного определения основных элементов циркуляции.
Из таких формул в качестве примера можно привести предложенные по результатам натурных испытаний одновинтовых судов разных серий (49 циркуляций на 11 судах), выполненных при различных углах перекладки руля. Из большого числа факторов путем регрессной*
ного анализа были отобраны лишь наиболее значимые, что позволило получить сравнительно простые расчетные формулы.
 Один из двух выбранных факторов — фактор корпуса и руля представляет собой комбинацию более простых факторов (см. п. 2.3) и определяется выражением
Один из двух выбранных факторов — фактор корпуса и руля представляет собой комбинацию более простых факторов (см. п. 2.3) и определяется выражением
(5.10)
L
где Ж ~~ отношение длины между перпендикулярами к ширине;
Он —- коэффициент полноты площади погруженной части ДП, рассчитываемой по формуле (2.5);
ХР — относительное удлинение руля, рассчитываемое по формуле (2.6);
5Р—относительная площадь руля, выраженная в процентах к площади погружен-

|
В качестве второго фактора выбран угол дифферента судна i|>0, выраженный в градусах,
 ф° -йм- 57,3°,
ф° -йм- 57,3°,
Дата добавления: 2016-07-09; просмотров: 948;