Устойчивость. Устойчивостью на курсе называется способность судна сохранять направление прямолинейного движения. Различают два вида устойчивости: собственную и эксплуатационную. 3 страница
Для наглядной оценки адекватности рассматриваемой математической модели ниже использованы результаты натурных испытаний торможения теплохода «Большевик М. Томас» водоизмещением 22 850 т.
На рис. 3.3 показано пассивное торможение судна ПХПм—Стоп, а на рис. 3.4 — торможение с реверсированием двигателя СХП—ПХЗ. Экспериментальные измерения пути и скорости показаны на обоих
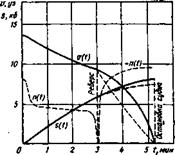 Рис. 3.4. Графики торможения теплохода «Большевик М. Томас» с реверсированием двигателя
Рис. 3.4. Графики торможения теплохода «Большевик М. Томас» с реверсированием двигателя
|
 рисунках черными точками, а графики s(t) и V(t), рассчитанные по формулам — сплошными линиями. Момент реверсирования (см. рис. 3.4) указан вертикальной штриховой линией. На обоих рисунках приведены также графики частоты вращения винта, построенные по результатам экспериментальных измерений.
рисунках черными точками, а графики s(t) и V(t), рассчитанные по формулам — сплошными линиями. Момент реверсирования (см. рис. 3.4) указан вертикальной штриховой линией. На обоих рисунках приведены также графики частоты вращения винта, построенные по результатам экспериментальных измерений.
На участке активного торможения от момента реверсирования до остановки судна (см рис. 3.4) для сравнения показаны штриховыми линиями также графики пути и скорости, построенные по формулам
(3.25) и (3.26).
Помимо описанных, существует еще ряд моделей, из которых можно отметить линейную математическую модель, в которой текущее значение силы сопротивления воды принято пропорциональным скорости судна в первой степени, т. е. R=KV (К — коэффициент сопротивления при линейной зависимости, кг/с), а сила упора — постоянной (Р,.= Р=const).
Имеющиеся результаты натурных экспериментов в виде элементов пассивного и активного торможения по каждому испытанному судну позволяют получить статистические данные точности расчетных значений путей пассивного и активного торможения для каждой математической модели.
Как известно, в общем случае торможения полный тормозной путь содержит участки пассивного и активного торможения (второй и третий периоды). Точность полного тормозного пути в соответствии с теорией ошибок можно оценивать по формуле
(3.39)
| т11 «ш отн * |
где Мот -относительное среднее квадратическое отклонение (СКО) полного тормозного пути, %;
отн — относительные СКО соответственно пассивного и активного тормозных путей, %;
sN
— отношение пассивного участка к полному тормозному пути;
m
“Тг —отношение активного участка к полному тормозному пути\
Таблица 3.1. Оценка точности математической модели торможения судба
|
Путь первого периода s1 (прохождение команды) из-за его малости на оценку точности практически не влияет.
Отношение i—. зависит от типа двигателя и его реверсивного
устройства, а также от начальной скорости судна. В реальных условиях это отношение находится в большинстве случаев в пределах 0,15-7-0,75. Для данных значений в табл. 3.1 приведены результаты оценки точности рассмотренных математических моделей для пассивных, активных и полных тормозных путей, выполненные на базе натурных испытаний торможения с полного и полного маневренного хода на 16 различных судах с проведением надежных траекторных измерений.
Напомним, что при оценке точности расчетные тормозные пути определялись с использованием значений коэффициента сопротивления и силы упора винта, найденных из условия равенства между расчетным к экспериментальным временем торможения. Поэтому приведенные в табл. 3.1 оценки характеризуют потенциальную точность, с которой каждая модель способна описывать процесс торможения судна при условии использования оптимальных значений коэффициента сопротивления и силы упора винта.
Любая из рассмотренных математических моделей может быть использована для расчета ИТХ, если известны значения коэффициента сопротивления и силы упора винта для каждого конкретного судна при заданных условиях торможения. Эти необходимые значения могут быть найдены какими-то расчетными или экспериментально-расчетными способами. Поскольку получаемые таким путем значения коэффициента сопротивления и силы упора винта будут содержать неизбежные погрешности, т. е. не будут оптимальными, то ИТХ, полученные с их использованием, будут характеризоваться (статистически) большими погрешностями, чем те, которые указаны в табл. 3.1.
Контрольные вопросы. 1. Каковы особенности реверсирования главного двигателя на теплоходах с гребным винтом фиксированного шага? 2. Из каких периодов в общем случае состоит процесс торможения судна? 3. Чем отличаются друг от друга основные математические модели торможения судна? 4. Как изменяется полезная сила упора винта в процессе активного торможения? 5. Как влияет загрузка судна на время и путь его торможения? в. Чем объясняется зависимость максимальной силы упора винта при активном торможении от осадки судна?
Глава 4.УПРАВЛЕНИЕ СУДНОМ В УСЛОВИЯХ ВЕТРА
4.1. Силы и моменты, связанные с воздействием ветра
Сила ветра оценивается в баллах двенадцатибалльной шкалы, приведенной в МТ-75.
Скорость ветра в судовых условиях измеряется над верхним мостиком с помощью анемометра. При этом измеряется так называемая кажущаяся скорость ветра UP, вектор которой представляет собой разность двух векторов — вектора истинного ветра ТГИ и вектора скорости судна Р, т. е.
W = Wh-V. (4.1)
Вектор кажущегося ветра, помимо скорости, характеризуется курсовым углом qw, т. е. углом между носовой частью ДП и кажущимся направлением ветра. За направление ветра принимается то, откуда дует ветер (ветер дует «в компас»).
Курсовые углы ветра измеряются от 0 до 180° вправо и влево от ДП (курсовые углы правого или левого борта).
Геометрический смысл формулы (4.1) характеризуется векторным треугольником, показанным на рис. 4.1 (а, б, в). Из рисунка видно, что под влиянием движения судна вперед со скоростью V курсовой угол кажущегося ветра будет всегда меньше, чем истинного.
Аэродинамическая сила и ее момент. Равнодействующая сила давления ветра на надводную часть — аэродинамическая сила А не совпадает в общем случае с направлением кажущегося ветра, а отклоняется в сторону траверзного направления (см. п. 1.1).
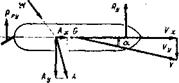
Надводная часть судна находится в потоке воздуха под углом атаки, равным курсовому углу кажущегося ветра. При этом на надводной части создается аэродинамическая сила А, имеющая, как показано на рис. 4.2, продольную Ах и поперечную Ау составляющие.
Продольная составляющая Ах влияет на скорость судна, а поперечная Ау вызывает боковое перемещение судна.
Поперечную аэродинамическую силу (Н) можно рассчитать по формуле
(4.2)
где Со* — безразмерный коэффициент поперечной аэродинамической силы, зависящий от формы надводной части судна и курсового угла кажущегося ветра;
Qy— боковая площадь парусности (площадь проекции надводной части на ДП), м2;



 ра —■ массовая плотность воздуха (рв» 1,226 кг/м).
ра —■ массовая плотность воздуха (рв» 1,226 кг/м).
Безразмерный аэродинамический коэффициент Сау по данным натурных и модельных исследований для разных судов находится обычно в пределах от 0,8 sin qw до 1,3 sin qw.


 Точка приложения аэродинамической силы в соответствии со свойствами крыла смещается от ЦП навстречу потоку воздуха (см. рис. 4.2), т. е. при носовых курсовых углах ветра в сторону носа, а при кормовых курсовых углах — в корму. Величина смещения зависит от курсового угла кажущегося ветра: чем острее угол атаки между ДП и направлением ветра, тем дальше от ЦП смещается точка приложения аэродинамической силы. Максимальное смещение точки приложения аэродинамической силы (при курсовых углах, близких к 0 и 180°) составляет в среднем приблизительно четверть длины судна, т. е. 0,25L, а при курсовых углах кажущегося ветра, равных 90°, точка приложения аэродинамической силы совпадает с ЦП.
Точка приложения аэродинамической силы в соответствии со свойствами крыла смещается от ЦП навстречу потоку воздуха (см. рис. 4.2), т. е. при носовых курсовых углах ветра в сторону носа, а при кормовых курсовых углах — в корму. Величина смещения зависит от курсового угла кажущегося ветра: чем острее угол атаки между ДП и направлением ветра, тем дальше от ЦП смещается точка приложения аэродинамической силы. Максимальное смещение точки приложения аэродинамической силы (при курсовых углах, близких к 0 и 180°) составляет в среднем приблизительно четверть длины судна, т. е. 0,25L, а при курсовых углах кажущегося ветра, равных 90°, точка приложения аэродинамической силы совпадает с ЦП.
Таким образом, в общем случае на корпус судна действует не только поперечная аэродинамическая сила, вызывающая дрейф судна, но и момент этой силы, стремящийся развернуть судно вокруг вертикальной оси, проходящей через ЦТ.
Плечо поперечной аэродинамической силы 1Л относительно ЦТ можно определить по приближенной формуле:
 7 -о Iе, I <ци 4w
7 -о Iе, I <ци 4w
/д-0,25+ L ^
где 7а—- относительное плечо аэродинамической силы, выраженное в долях длины кор-
.к. (‘л- -£);
L—длина судна между перпендикулярами, м;
/цп— отстояние ЦП от Цт, м.
В формуле (4.3) величина /цп принимается положительной, если ЦП смещен в нос от ЦТ, и отрицательной при его смещении в корму. Знак величины /л укажет соответственно направление смещения точки приложения аэродинамической силы от ЦТ.
Положение ЦП по длине судна /цп зависит от размеров и расположения надстроек и других надводных частей, а также от дифферента судна и его осадки. Площадь парусности и положение ЦП по длине судна можно рассчитать по чертежу бокового вида судна с учетом масштаба. При этом следует иметь в виду, что положение ЦП значительно изменяется с изменением дифферента судна.
При определении отстояния ЦП от ЦТ для (4.3) необходимо учитывать положение ЦТ по длине, которое только при .посадке судна на «ровный киль» приблизительно совпадает с мидель-шпангоутом. Если ЦТ смещен в сторону одной из оконечностей судна, то благодаря дифференту ЦП смещается в противоположную сторону, что приводит к существенному изменению /ц„ и, следовательно, /д.
Аэродинамический момент Мл=Лу1л стремится развернуть судно относительно вертикальной оси в направлении уваливания наветренной оконечности судна.
Гидродинамическая сила и ее момент. Поперечная аэродинамическая сила Ау создает боковое перемещение судна — дрейф со скоро-
стыо Vy, в результате чего корпус судна движется с углом дрейфа а.
В этих условиях корпус судна испытывает сопротивление со стороны воды в виде гидродинамической силы /?, имеющей поперечную составляющую Ry.
Подводная часть судна характеризуется площадью проекции погруженной части на ДГ1. Эту площадь Sy для приближенных оценок можно принимать равной произведению длины судна между перпендикулярами на среднюю осадку.
При движении судна лагом, когда о=90°, точка приложения силы реакции воды (гидродинамической силы Л) носит название центра бокового сопротивления (ЦБС).
Приближенно можно считать, что ЦБС совпадает с центром площади проекции погруженной части судна на ДП, а по длине судна практически совпадает с ЦТ.
При посадке судна на ровный киль ЦБС, как и ЦТ, примерно совпадает с мидель-шпангоутом, а при наличии дифферента отстояние ЦБС от мидель-шпангоута можно приближенно рассчитать по формуле
7- _о,5,
цвс 3 (1 —d„/d„)
где /цБС — расстояние ЦБС от мидель-шпангоута, выраженное в долях длины судна L; ёы —- осадка носа, м; dm -- осадка нормы, м.
Знак «—» у 7цбс укажет, что ЦБС смещено в корму от ми- дель-шпангоута, а знак «+» — в нос.
Если угол дрейфа не равен 90°, то точка приложения гидродинамической силы смещается по ДП в направлении движения, т. е. навстречу набегающему потоку воды. Если угол дрейфа меньше 90°, то точка приложения смещается от ЦБС в сторону носа, а при угле дрейфа более 90° — в сторону кормы, т. е. смещение точки приложения гидродинамической силы имеет ту же закономерность, что и для аэродинамической. Однако величина смещения точки приложения гидродинамической силы примерно в 2 раза больше, чем аэродинамической при одинаковых углах атаки (а=?»), что объясняется более совершенными обводами подводной части и, следовательно, более выраженным проявлением свойств крыла.
Плечо поперечной гидродинамической силы относительно ЦТ можно приближенно рассчитывать по формуле
где 1н — относительное плечо поперечной гидродинамической силы, выраженное в долях длины корпуса -^rj;
/цвс — отстояние ЦБС от ЦТ, м.
В соответствии с формулой (4.4) точка приложения гидродинамической силы имеет максимальное смещение при углах дрейфа, близких к 0 и 180°, когда это смещение достигает ±0,51, т. е. точка приложения приближается к носовому или кормовому перпендикуляру.
Угол дрейфа, близкий к 180®, судно может иметь при движении назад.
|
Рис. 4.3. Силы, действующие на судно при движении с углом дрейфа
 Поперечная составляющая гидродинамической силы Ry создает гидродинамический момент MR относительно вертикальной оси, проходящей через ЦТ судна,
Поперечная составляющая гидродинамической силы Ry создает гидродинамический момент MR относительно вертикальной оси, проходящей через ЦТ судна,
MR =/?* iR,
Поперечная гидродинамическая сила Ry в Н рассчитывается по формуле*
 Ry-CyZ-SyV*.
Ry-CyZ-SyV*.
где р — массовая плотность забортной воды, кг/м3;
S- — площадь проекции подводной части судна на ДП, м2;
V —* скорость судна относительно воды, м/с;
Cv — безразмерный коэффициент поперечной гидродинамической силы, значение ко-
торого можно выразить приближенной зависимостью 0,23sinct-f l,09sin2cc
(4.7)
(2,16—7d/L)*
где 6 — коэффициент общей полноты; d/L — отношение средней осадки судна к его длине.
Очевидно, что формулы (4.3) и (4.4) структурно подобны. Следует лишь еще раз отметить, что ЦБС располагается по длине судна всегда сравнительно близко от ЦТ, поэтому в практических расчетах допустимо /ЦБС принимать равным нулю, в то время как /11П может иметь значительную величину.
4.2. Ветровой дрейф
Условия движения судна постоянным курсом с углом ветрового дрейфа выражаются вторым и третьим уравнениями системы (1.1), которые для случая установившегося движения, когда инерционные силы и момент равны нулю, можно записать в следующем виде:
|
(4.8)
Ветер, дующий со скоростью W под произвольным курсовым углом, воздействует на надводную часть судна силой А, которую в общем случае можно разложить (рис. 4.3) на две составляющие: продольную Ах и поперечную Ау.
Продольная составляющая Ах, складываясь алгебраически с силой сопротивления Я*, увеличивает или уменьшает скорость движения судна Vx. Эта скорость учитывается лагом, поэтому силу Ах можно не рассматривать.
Сила Ау, действующая перпендикулярно ДП, заставляет судно смещаться в поперечном направлении со скоростью V» называемой скоростью дрейфа. В данных условиях направление и скорость дейст
вительного перемещения судна относительно воды определяются вектором V, который является геометрической суммой векторов Vx и Vv (см. рис. 4.3).
Непосредственно из приведенной схемы следует
tga = ~; V* • (4.9)
Vx cos а
Для получения формулы угла дрейфа можно воспользоваться первым уравнением системы (4.8) на том основании, что гидродинамическая сила Rv согласно (4.7) зависит от угла дрейфа.
Боковая сила руля Рру, возникающая в связи с перекладкой руля для удержания судна на курсе, по сравнению с силой Rv при движении с углом дрейфа относительно невелика, поэтому ее в первом приближении можно не учитывать и тогда
R.y = Ау,
а после подстановки значений (4.2) и (4.6)
Су Y + - са„ -|2- Q„ V. (4.10)
По данным, приведенным в п. 4.1, можно принять значение аэродинамического коэффициента
Спу= 1,18 sin ^ц). (4.11)
Подстановка в уравнение (4.10) выражений (4.8) и (4.11) приводит к квадратному уравнению относительно sin а. Решение этого уравнения с последующим переходом от скорости относительно воды V, выраженной в м/с, к скорости по курсу Ул% выраженной в уз
[V л = —q '§п~ )’ и некоторые упрощающие преобразования дают рабочую формулу для определения угла дрейфа
|/ (О.ПКл)1 + ^ —0,\\Vji
tg«- % . (4.12)
у л
где W — скорость кажущегося ветра, м/с;
Vя — скорость судна по курсу, уз;
к —коэффициент дрейфа, который можно рассчитывать по приближенной форму* ле
*о-(0.1М-0.в£)|/Г «'3)
Сопоставление с формулой (4.9) показывает, что числитель формулы (4.12) выражает скорость бокового перемещения судна под влиянием ветра (скорости дрейфа), а знаменатель — скорость судна по курсу.
Из формулы (4.12) видно, что скорость дрейфа V'v зависит от скорости по курсу VA: чем больше Ул, тем меньше Vy при тех же значениях W и qv.
Для практического применения полученной формулы следует учесть еще то обстоятельство, что скорость ветра вблизи поверхности моря за счет трения нижнего слоя воздуха о поверхность воды меньше, чем в более высоких слоях. Поскольку измерение скорости ветра анемометром выполняется на высоте мостика, то результаты оказываются несколько завышенными по сравнению со средней скоростью ветра, воздействующего на надводную часть.
Профиль скоростей ветра на высоте подчиняется логарифмическому закону, из которого вытекает, что для получения эквивалентного давления скорость ветра, измеренная над верхним мостиком, должна быть умножена на коэффициент 0,83, т. е.
1Р = 0,83Г\ (4.14)
где № —эквивалентная скорость кажущегося ветра для использования в формуле (4.12), м/с;
W' — скорость кажущегося ветра, измеренная анемометром над верхним мостиком, м/с.
Опыт практического использования формулы (4.12) на различных судах показывает, что предвычисление угла дрейфа обеспечивается с точностью 1—2°, что примерно соответствует точности графического счисления пути судна.
Угол дрейфа по формуле (4.12) в условиях плавания легко рассчитывать с помощью калькулятора. При этом следует иметь в виду, что коэффициент дрейфа ka для каждого конкретного судна зависит только от его осадки, поэтому значения коэффициента целесообразно заранее рассчитать для рабочего диапазона осадок судна с интервалом, например, через 1 м и использовать то значение £а, которое соответствует средней осадке на данный период плавания. Переменными величинами будут скорость кажущегося ветра W в м/с, его курсовой угол qw и скорость судна Ул, уз.
Наиболее просто угол дрейфа может быть получен из специальных таблиц дрейфа, рассчитанных по формулам (4.12) с учетом (4.13) и (4.14). Предлагаемые таблицы приведены в прил. 1 и состоят из трех таблиц. Определение угла дрейфа по ним сводится к последовательной выборке из трех таблиц (необходимая интерполяция выполняется «на глаз»).
Таблицы дрейфа являются универсальными и могут быть использованы на любом судне по заранее вычисленным значениям ka для разных осадок.
Влияние переложенного руля на угол дрейфа. При определении угла дрейфа по формуле (4.12), а также с помощью таблиц или номограммы, построенных по указанной формуле, не учитывается тот факт, что под действием аэро- и гидродинамической сил, точки приложения которых в общем случае не совпадают с ЦТ судна, последнее имеет тенденцию разворачиваться вокруг вертикальной оси, т. е. приводиться к ветру или уваливать в зависимости от знака результирующего момента действующих сил.
Чтобы обеспечить движение заданным курсом, приходится перекладывать руль на некоторый средний угол, т. е. создавать момент боковой силы руля для компенсации результирующего момента аэро- и гидродинамической сил. При этом поперечная сила руля PPV, складываясь алгебраически с поперечной аэродинамической силой Ау, увеличивает или уменьшает скорость бокового перемещения судна Vv% что приводит к изменению угла дрейфа а на величину Да, которая зависит от отношения площадей руля и погруженной части ДП — Sp/Sy.
Для морских транспортных судов можно приблизительно считать, что в среднем
(4.15)
дрешра
V
Рис. 4.4. Силы и моменты» действующие на судно в свободном дрейфе
Учесть влияние перекладки руля на угол дрейфа можно с помощью приближенной формулы, полученной с учетом (4.!5),
Ла°= =F 0,26р. (4.16)
Из приведенной формулы видно, что на каждые 5° перекладки руля угол дрейфа изменяется приблизительно на 1°. При перекладке руля под вегер (судно стремится к ветру) абсолютное значение угла дрейфа уменьшается на величину Ла°. Если же судно уваливает, и приходится руль перекладывать на ветер, то значение угла дрейфа соответственно возрастает.
Дрейф судна с остановленными двигателями. Иногда судну прихо дится длительное время находиться в море с остановленными двигате лями (ожидание светлого времени, неисправность двигателя, ожидание распоряжений и т. п.). При наличии ветра судно в данных обстоятельствах дрейфует с некоторой скоростью, направление которой в общем случае не совпадает с направлением действующего ветра.
При установившемся дрейфе аэродинамическая сила А уравновешивается гидродинамической силой R. Для равновесия судна по курсу необходимо, чтобы аэро- и гидродинамическая силы действовали в одной плоскости. При этом условии аэро- и гидродинамический моменты уравновешивают друг друга.
Указанному условию соответствуют положения судна носом или кормой строго против ветра, однако это случаи неустойчивого равновесия, так как при любом случайном отклонении ДП от данного направления возникает поперечная аэродинамическая сила, момент которой стремится развернуть судно еще больше от линии ветра. Одновременно возникает поперечная гидродинамическая сила, момент которой разворачивает судно в том же направлении, что и аэродинамический момент (рис. 4.4).
Действующие при свободном дрейфе силы и их моменты стремятся развернуть судно приблизительно лагом к ветру, следовательно, где-то вблизи этого направления и должно быть положение устойчивого равновесия. Данный вывод подтверждается опытом: суда в установившемся свободном дрейфе располагаются примерно лагом к ветру.
Аналитическое определение условий устойчивого свободного дрейфа выражается системой трех уравнений (1.1), которые для случая установившегося режима, т. е. при отсутствии инерционных сил, а также равенства нулю силы упора винта и силы на руле, имеют вид:
Rx—^xl |
RV=AV; (4.17)
Система (4.17) выражает условие равновесия аэро- и гидродинамических сил по осям X и К, а также равновесие аэро- и гидродинамического моментов вокруг оси Z.
Продольная гидродинамическая сила Rx выражается зависимостью:
= (4.18)
где Сж —коэффициент продольной гидродинамической силы, который для движения с углом дреАфа может быть получен по эмпирической формуле
С, = 0,075 sin ^168»^ <4Л9>
Продольная аэродинамическая сила Ах выражается приближенной формулой:
А* ~ 1.3-Ё2-<?«*’* cos V»-. (4.20)
где Qx — лобовая площадь парусности, м2.
Ранее были приведены формулы для выражения поперечных сил и их коэффициентов: (4.2), (4.6), (4.7) и (4.11).
Условие равновесия одновременно по осям X и У можно получить, если поделить второе уравнение на первое системы (4.17):
4L- (4 2|)
Дат Л*
Подставляя в найденное условие выражения (4.2), (4.6), (4.18) и (4.20), окончательно получим
. _________________ 0,23 sin a-f 1,09 sin» а Qx
(*.,«-ТТ) 0.075S.*
Полученное выражение дает возможность для любого значения угла дрейфа а определить значение курсового угла ветра qWt при котором обеспечивается равновесие сил по продольной и поперечной осям одновременно. I
Второе условие устойчивого свободного дрейфа выражается равновесием аэро- и гидродинамического моментов относительно вертикальной оси, проходящей через ЦТ судна.
Если разделить третье уравнение на второе системы (4.17), то, учитывая, что отношение момента к силе равняется плечу этой силы, получим указанное условие в виде равенства плеч аэро- и гидродинамической сил
(4.23)
Рис. 4.5. Положение судна при свободном дрейфе в зависимости от знака смещения ЦП от ЦТ:
а — ЦП смещен в нос от ЦТ; б — ЦП смешен в корму от ЦТ
Подставляя значения плеч из формул (4.3) и (4.4) и учитывая при этом, что ЦБС располагается, как правило, достаточно близко к ЦТ судна (/ЦБС « 0), получим окончательно второе условие равновесия при свободном дрейфе
,; = 2(«° -45° + 1807ц„). (4.24)
Положение устойчивого равновесия при дрейфе с остановленными двигателями будет иметь место при одновременном выполнении двух условий, выражаемых формулами (4.22) и (4.24).
На большинстве морских судов коэффициент ft находится в пределах 0,6—0,8, а отношение d)L — в пределах 0,03—0,07, поэтому можно приближенно принять средние постоянные значения:
6- 0,7; d/L=0,5.
С учетом принятых значений по формулам (4.22) и (4.24) построена номограмма для определения q°w и а° по QVIQX и 7ц„, приведенная в прил. 2.
Номограмма показывает, что при больших значениях 7ЦП направление свободного дрейфа может существенно отличаться от направления ветра (порядка до 20°), что следует учитывать на практике.
Положения судна при свободном дрейфе в зависимости от знака 7ЦП и действующей силы показаны на рис. 4.5.
При свободном дрейфе практически важно знать не только направление движения, но и скорость судна относительно воды V.
Из приведенной схемы (см. рис. 4.5) видно, что
у_ V* _ ^ (4 251
cos (90°— a0) sin а *
где vv — поперечная составляющая скорости судна.
Поперечная составляющая скорости Vv соответствует скорости дрейфа «на стопе» Кв0, которую можно получить по таблицам дрейфа (см. прил. 1).
4.3. Маневрирование в условиях ветра
При маневрировании в условиях ветра внешние силы и их моменты, особенно при небольших скоростях движения, сопоставимы с силами и моментами средств управления (руля и винта), а нередко и превосходят их, что затрудняет или делает даже невозможным выполнение того или иного маневра из-за резкого ухудшения или потери управляемости.
Для оценки и прогнозирования поведения судна при маневрировании в условиях ветра воспользуемся уже известными нам обшими закономерностями отдельно для аэро- и гидродинамических сил и их моментов.
На рис. 4.6 схематически показано действие на судно аэро- и гидродинамических сил в зависимости от курсового угла кажущегося ветра для трех условий.
Точки приложения поперечных сил показаны в соответствии с приближенными формулами (4.3) и (4.4) для плеч аэро- и гидродинамической сил соответственно. При этом для простоты сделано допущение, что ЦП и ЦТ совпадают по длине судна и находятся в точке G (такое допущение достаточно справедливо для судов без дифферента с надстройкой, расположенной посредине, а также для судов с кормовым расположением надстройки, но имеющих такой дифферент ^на корму, при котором ЦП смещен вперед до совпадения с ЦТ судна).
Рассмотрим подробнее каждый из трех случаев (см. рис. 4.6).
Ветер со стороны носовых курсовых углов. Поток воздуха, действующий на надводную часть судна, имеющего скорость vx> со стороны носового курсового угла (см. рис. 4.6, а) создает поперечную аэродинамическую силу Ау. Точка ее приложения в соответствии с формулой
(4.3) смещена от ЦТ вперед по ДП, т. е. навстречу потоку воздуха, на расстояние 1л. В связи с этим создается момент Ау1а, стремящийся развернуть судно в направлении увеличения qu-% т. е. носом от ветра. В то же время сила Аи создает поперечное движение со скоростью
Дата добавления: 2016-07-09; просмотров: 969;