Устойчивость. Устойчивостью на курсе называется способность судна сохранять направление прямолинейного движения. Различают два вида устойчивости: собственную и эксплуатационную. 2 страница
У
Рру Lr | я у
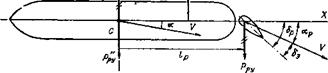 Рис. 2.10. Управляемость на заднем ходу
Рис. 2.10. Управляемость на заднем ходу
|
Для объяснения возникающих при этом явлений приложим в центре тяжести G (см. рис. 2.10) две силы, равные по величине силе Рру и направленные в противоположные стороны (такие силы ничего не изменяют, так как взаимно компенсируют друг друга). Одна из этих сил вместе с силой на руле Рру образует пару сил с моментом Рру/р, стремящимся повернуть судно вокруг вертикальной оси, а другая сила, оставаясь нескомпенсированной, вызывает поперечное смещение судна. При таком смещении возникает угол дрейфа а, благодаря которому на корпусе возникает поперечная гидродинамическая сила Ryt точка приложения которой смещена от центра тяжести в сторогу кормы на величину /д. Момент этой силы RylH препятствует повороту судна в сторону перекладки руля. Если на переднем ходу момент поперечной гидродинамической силы в начале поворота имеет одинаковый знак с моментом руля и, следовательно, способствует повороту (см. рис. 2.3), то на заднем ходу этот момент препятствует повороту.
Кроме указанной причины, отрицательное влияние на поворотливость оказывает косое натекание воды на руль, за счет чего эффективный угол перекладки руля бэ оказывается уменьшенным на угол дрейфа аР по сравнению с геометрическим углом перекладки 6Р. На переднем ходу этот эффект сказывается гораздо меньше за счет спрямляющего влияния па поток со стороны корпуса, в то время как на заднем ходу руль находится по движению впереди, поэтому корпус не оказывает влияния на направление потока в месте расположения руля.
Перечисленными причинами и объясняется в первую очередь плохая управляемость судов на заднем ходу.
2.6. Управление многовинтовым судном
Одновинтовые суда по сравнению с многовинтовыми в общем случае имеют более высокий пропульсивный КПД. Однако управление такими судами в стесненных условиях (например, в узкостях, при выполнении швартовных операций, во льдах и т. п.) намного сложнее. Кроме того, на крупнотоннажных судах с повышенными скоростями технически затруднительно сосредоточить требуемую большую мощность на одном валу. С учетом указанных и некоторых других обстоятельств на крупных пассажирских судах обычно применяются двухвальные силовые установки. Трех- и четырехвальные установки находят применение на быстроходных судах большого водоизмещения и на ледоколах.
Для обеспечения симметричной управляемости винты двухвинтовых, а также бортовые винты у трехвинтовых судов имеют противоположное направление вращения. На некоторых двухвинтовых судах для повышения поворотливости устанавливают два пера руля за винтами.
Двухвинтовое судно при выходе из строя одной машины или повреждении одного винта может двигаться и управляться с помощью второго винта и руля, а при выходе из строя рулевого устройства сохраняет управляемость с помощью раздельной работы двух винтов.
Двухвинтовое судно может разворачиваться практически на месте за счет работы винтов враздрай. Разворачивающий момент при этом создается не только за счет расположения винтов по разные стороны от ДП, т. е. наличия плеча, но и за счет разности давлений воды у бортов кормового подзора, создаваемой противоположно направленными струями от винтов.
К недостаткам двухвиитовых судов следует отнести пониженную эффективность расположенного в ДП руля, особенно в случае винтов наружного направления вращения, а также повышенную опасность повреждения винтов, например, о причал во время швартовных операций.
Трехвинтовые суда объединяют в себе маневренные свойства одно- и двухвинтовых судов.
Контрольные вопросы. I. Какими двумя основными свойствами характеризуется управляемость судна? 2. Какими особенностями характеризуется поведение судна, не обладающего собственной устойчивостью на курсе? 3. Какими периодами характеризуется процесс циркуляции судна? 4. Как влияет на поворот судна момент поперечной гидродинамической силы, приложенной к корпусу? 5. Зависят ли элементы циркуляции судна от значения исходной установившейся скорости? 6. Что называют предельным углом обратной поворотливости?
Глава 3. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА 3.1. Общие сведения об инерционно-тормозных свойствах судна
При управлении судном на акватории портов, рейдов, в узкостях, при расхождении судов в море, а также в аварийных ситуациях возникает необходимость изменения скорости судна. Изменение скорости морского судна, обладающего большой массой, происходит главным образом под воздействием двух сил: силы упора (тяги) движителя и силы сопротивления воды. При этом масса судна при его ускорении (положительном или отрицательном) порождает силу инерции, всегда препятствующую изменению скорости движения.
Способность судна изменять скорость своего движения во времени под совместным влиянием перечисленных сил при различных начальных условиях принято называть инерционно-тормозными характеристиками (ИТХ).
Движение судна в процессе изменения скорости описывается первым уравнением системы (1.1). При отсутствии ветра и прямом положении руля, когда сила Ах и Ррх несущественны, для случая прямолинейного движения:
mx — - ~Я=Ь (3.1)
(it
где m* — масса судна с учетом присоединенной массы воды при движении по оси X (т*«т+Хц), кг;
R — сила сопротивления воды, Н;
Я* -сила упора винта (винтов), Н. I
Знак «—» перед силой сопротивления указывает, что эта сила всегда направлена против движения, знак «+» перед силой упора винта означает, что упор направлен вперед, а знак «—» — назад.
Произведение массы на ускорение пгх представляет собой силу инерции. При торможении ускорение имеет отрицательный знак.
Присоединенная масса воды при движении по оси X обычно принимается равной 10% массы судна (А.ц»0,1т).
При этом условии масса судна с учетом присоединенной массы воды рассчитывается по формуле '
тх— 1, 1Д10*, (3.2)
где Д — водоизмещение судна, т.
Сила сопротивления воды пропорциональна квадрату скорости, т. е.
R = kV*t (3.3)
где /( — коэффициент пропорциональности (сопротивления), кг/м;
V — скорость судна, м/с.
Сила сопротивления воды
(3.4)
где | — безразмерный гидродинамический коэффициент полного сопротивления, завися* щий от формы (обводов) корпуса и состояния его поверхности (шероховатости) ;
р — массовая плотность воды (для морской воды средней солености можно принимать р«1020 кг/м3);
И — площадь смоченной поверхности корпуса, ма.
Из сопоставления формул (3.3) и (3.4) ясно, что
*=5-§-а. (3.5)
т. е. коэффициент k зависит не только от формы и состояния поверхности корпуса, но и от его размеров, характеризуемых площадью смоченной поверхности, поэтому для каждого судна значение коэффициента k изменяется с изменением осадки.
Сила упора винта зависит от диаметра DB, шагового отношения Я/Db, дискового отношения 0, числа лопастей г, частоты вращения л,
поступи винта ЛР= у D’ а также от взаимодействия винта с
корпусом судна.
Сила упора изолированного (без учета взаимодействия с корпусом) винта определяется для установившегося движения передним или задним ходом по формуле
Р = -^—p«*Di, (3.6)
‘ ' Р
где Р — сила упора изолированного винта, Н; п — частота вращения, об/с;
Ар — коэффициент упора винта, определяемый по специальным диаграммам для переднего или заднего хода в зависимости от характеристик винта и поступи ЛР.
Формула (3.6) для установившегося движения дает надежные результаты, но если движение происходит с изменением скорости, то возникают переходные процессы, существенно влияющие на силу упора, что особенно проявляется в режиме торможения, когда судно движется вперед, а винт работает задним ходом. Более подробно эти вопросы будут разобраны при рассмотрении различных режимов движения судна.
Для изменения скорости движения судна приходится изменять частоту вращения винта (винтов), а иногда и изменять направление вращения, т. е. выполнять реверсирование. Способ выполнения этих
операций зависит от типа про- пульсивного комплекса двигатель — движитель.
 Наибольшее распространение на морских судах в качестве главных двигателей имеют: двигатели внутреннего сгорания (ДВС), турбозубчатые агрегаты (ТЗА) и гребные электродвигатели (ГЭД). В качестве движителей используются ВФШ и ВРШ, образующие пропульсив- ные комплексы: ДВС-ВФШ,
Наибольшее распространение на морских судах в качестве главных двигателей имеют: двигатели внутреннего сгорания (ДВС), турбозубчатые агрегаты (ТЗА) и гребные электродвигатели (ГЭД). В качестве движителей используются ВФШ и ВРШ, образующие пропульсив- ные комплексы: ДВС-ВФШ,
ТЗА-ВФШ, ГЭД-ВФШ, а также любой двигатель — ВРШ. Рассмотрим некоторые характерные особенности выполнения реверсов перечисленных пропульсивных комплексов.
Рассмотрим некоторые характерные особенности выполнения реверсов перечисленных пропульсивных комплексов,
Реверсирование ДВС-ВФШ. На большинстве теплоходов установлены ДВС, напрямую связанные с гребным валом. Чтобы выполнить реверс, сначала закрывается подача топлива на ДВС. Затем, когда обороты снизятся, из пусковых баллонов в цилиндры подается воздух, проворачивающий двигатель в обратном направлении, после этого впрыскивается топливо, которое в результате сжатия воспламеняется, т. е. происходит запуск двигателя на топливе.
Для большинства теплоходов характерен замедленный реверс при торможении с полного переднего хода. Это объясняется тем, что давление контрвоздуха, подаваемого при реверсе в цилиндры, оказывается недостаточным для преодоления момента, приложенного к винту со стороны набегающего потока воды. Для большинства ДВС уверенный реверс возможен лишь тогда, когда обороты переднего хода вращающегося в турбинном режиме винта (после прекращения подачи топлива) снизятся до значения 25—35 % от оборотов полного переднего хода, что соответствует снижению скорости судна примерно до значения 60—70 % от скорости полного переднего хода. При этом судно длительное время движется по инерции и успевает пройти значительный путь, нередко намного превышающий путь, проходимый судном после запуска двигателя на задний ход.
На рис. 3.1 приведены графики скорости V(t) и тормозного пути s(7), частоты вращения винта n(t), построенные по результатам натурных испытаний теплохода «Серов» водоизмещением 19 500 т при торможении с полного переднего хода (1/0=16,4 уз) полным задним ходом (ПХП—ПХЗ [1]).
Если же торможение выполняется при сниженной начальной скорости, например с малого переднего хода, то реверс выполняется быстро за 10—15 с и путь торможения резко сокращается.
Двигатели внутреннего сгорания на заднем ходу развивают практически такую же мощность, как и на переднем.
Реверсирование ТЗА-ВФШ. На турбоходах при торможении используется турбина заднего хода, мощность которой составляет примерно 50% мощности турбины переднего хода (обе турбины имеют общий вал).
Для выполнения реверса с помощью маневрового клапана перекрывается пар на сопла турбины переднего хода и открывается на сопла заднего хода.
Необходимо учитывать, что ротор турбины вращается с частотой порядка нескольких тысяч оборотов в 1 мин, поэтому его остановка с помощью контрпара, подаваемого на лопатки турбины заднего хода, не может быть выполнена мгновенно. Тем не менее реверс турбины с полного переднего хода выполняется значительно быстрее, чем на теплоходах, обычно не более чем за 1 мин, но упор винта на заднем ходу сравнительно невелик. Благодаря указанным свойствам тормозные пути турбоходов при торможении с полного переднего хода обычно бывают того же порядка, что и на теплоходах при прочих равных условиях. Однако при малых начальных скоростях тормозные характеристики турбоходов из-за малой мощности турбины заднего хода значительно хуже, чем у теплоходов.
Реверсирование ГЭД-ВФШ. Существуют различные типы электроприводов на постоянном и переменном токе. Судовые энергетические установки электроходов обычно состоят из нескольких дизель- или турбогенераторов, питающих гребные электродвигатели, что позволяет оперативно варьировать мощностями в зависимости от конкретных условий работы судна. Особенно удобны электроприводы на многовинтовых ледоколах и других судах специального назначения, условия работы которых изменяются в широких пределах.
Реверсирование электродвигателей осуществляется коммутированием питающего напряжения. Тормозные характеристики электроходов обычно несколько лучше, чем теплоходов.
Реверсирование ВРШ. Изменение направления упора ВРШ происходит в результате поворота лопастей винта без изменения направления вращения двигателя и без снижения частоты вращения.
Эффективность ВРШ при торможении существенно зависит от скорости срабатывания привода поворота лопастей. Механизмы поворота лопастей современных ВРШ, управляемые с мостика, позволяют изменить шаг вита с полного переднего на полный задний ход за 5—10 с, что обеспечивает резкое уменьшение тормозного пути. Суда с такими приводами обладают наилучшими реверсивными характеристиками.
Винт в направляющей насадке по сравнению с аналогичным винтом без насадки при одинаковой частоте вращения создает силу упора при торможении приблизительно на 15% меньше.
3.2. Движение при изменениях режиме работы двигателя на переднем ходу
При плавании в условиях ограниченной видимости, в районах скопления других судов, на подходах к портам, маневрировании на рейдах приходится для движения нужными скоростями часто менять режим работы двигателя на переднем ходу, т. е. изменять силу упора винта.
Судно, обладающее большой массой и, следовательно, инерционностью, не может сразу приобретать скорость, соответствующую новому режиму движения.
На всех судах устанавливаются определенные дискретные ре>кй- мы двигателя (двигателей) для работы передним и задним ходом, которые по установившейся традиции имеют следующие названия: самый малый ход, малый ход, средний ход, полный маневренный ход, полный ход. В конце каждого из указанных названий добавляется слово «вперед» или «назад». В дальнейшем для обозначения режимов будем пользоваться для краткости сокращениями: СМХП, МХП, СХП, ПХПм, ПХП, а также СМХЗ, МХЗ и т. д. Для каждого из перечисленных режимов устанавливается частота вращения винта. При этом для ПХП частота вращения соответствует мощности главного двигателя, обеспечивающей движение судна с эксплуатационной плановой скоростью. Поскольку коэффициент сопротивления воды зависит от осадки судна, то для реализации мощности двигателя в грузу и в балласте устанавливаются обычно разные значения частоты вращения: в балласте частота вращения винта и соответствующая ей эксплуатационная скорость судна несколько выше, чем в грузу.
Для промежуточных режимов частоты вращения устанавливаются таким образом, чтобы скорости судна имели по отношению к скорости полного хода примерно следующие значения: СХП «0,7 ПХП; МХП« «0,5 ПХП; СМХГ1«0,ЗПХП.
Иногда для СМХП выбирается минимальная частота вращения, при которой еще обеспечивается устойчивая работа двигателя внутреннего сгорания. При этом скорость судна, соответствующая этой частоте, может быть меньше 0,3 от скорости полного хода.
Скорость ПХПм выбирается обычно несколько выше скорости среднего хода.
Примерная зависимость между частотами вращения винта и соответствующими им скоростями судна выражается формулой

|
(3.7)
Эта формула позволяет приближенно определить скорость судна, соответствующую заданной частоте вращения винта, если известна скорость при какой-то другой частоте вращения.
Процесс движения судна после изменения частоты вращения работающего передним ходом двигателя описывается дифференциальным уравнением (3.1), которое для данного случая и с учетом подстановки
(3.3) приобретает вид

|
| т. |
(3.8)
где Рв — текущее значение силы упора винта на переднем ходу, Н.
•Как показывает анализ модельных и натурных экспериментов, полезная сила упора винта на переднем ходу при изменении режима двигателя быстро приобретает значение, соответствующее этому новому режиму, после чего изменяется мало, т. е. остается близкой к постоянному значению в процессе изменения скорости судна Сказанное позволяет сделать допущение, что полезная сила упора винта на переднем ходу в переходном процессе изменения скорости судна остается постоянной, т. е.
(3.9)
Когда переходный процесс изменения скорости заканчивается, т. е. скорость приобретает установившееся значение (У=УуСт), ускорение
(или замедление) судна становится равным нулю -dJt — 0^ . Следовательно, уравнение (3.8) для этого предельного случая приобретает вид
kV^r = Pe, (3.10)
а так как Ре в процессе изменения скорости принята постоянной (3.9), то дифференциальное уравнение (3.8) можно записать в виде
m*-7T=k(vUr-v*), (зло
где Vyc-r — значение установившейся скорости для используемого режима двигателя, м/с;
V — текущее значение скорости, м/с.
Если в конкретном случае V<VyCT, то уравнение (3.11) описывает процесс увеличения скорости судна. Если же У>УуСт, то происходит снижение скорости.
После разделения переменных
m.v dV
d/ = -
V% — V*
r уст r
Время изменения скорости от V\ до Уч выражается определенным интегралом в соответствующих пределах
£ . (3.12)
dV dV
Теперь, если учесть, что ——V ■ -» то после подстановки этого
выражения в уравнение (3.11) и разделения переменных получим определенный интеграл, выражающий путь судна в процессе изменения скорости от Vi до VV
Г УМ
-—[-тг^г 13131
После интегрирования выражений (3.12) и (3.13) получим формулы соответственно для времени в секундах и пути в метрах при изменении скорости судна от V\ до V'2 (Vi, V2 и VycT выражаются в м/с, тх — в кг, k — в кг/м):
Следует отметить, что формулы (3.14) и (3.15) не дают определенного решения для случая, когда ^2= Ууст. Это объясняется тем, что в процессе изменения скорости судна последняя стремится к установившемуся значению асимптотически, т. е. время этого процесса и проходимый при этом путь стремятся к бесконечности, что и выражается указанными формулами.
С учетом сказанного формулы позволяют получить конечные решения, когда V2 имеет любое промежуточное значение между значениями V\ и VVt, но равное УуСт или нулю.
3.3. Торможение судна
Тормозные характеристики судна, под которыми подразумеваются время и путь торможения в зависимости от начальной скорости, имеют важное значение для обеспечения безопасности мореплавания.
Торможение бывает пассивным и активным.
Пассивное торможение выполняется при остановленном двигателе только за счет сопротивления воды.
Активное торможение обеспечивается за счет реверсирования главного двигателя, после чего создается сила упора винта назад.
Реверс главного двигателя не может быть выполнен мгновенно, поэтому активному торможению всегда предшествует участок пассивного.
В общем случае процесс торможения принято делить на три периода.
Первый период—прохождение команды продолжается от момента подачи команды по машинному телеграфу до момента закрытия топлива на ДВС, пара на ТЗА или выключения питания ГЭД. Первый период длится недолго, примерно 5 с.
Второй период — пассивное торможение длится с момента прекращения подачи топлива (пара) на двигатель до момента реверса.
Третий период — активное торможение длится с момента реверса до момента полной остановки судна или снижения скорости до какого-то заданного значения.
Полное время Т и полный тормозной путь 5 определяются как суммы соответствующих элементов по трем периодам:

|
(3.16)
где римскими цифрами в индексах указаны периоды торможения.
На судах с ВРШ началом третьего периода можно считать момент прохождения лопастями нулевого положения.
Процесс торможения судна на основании (3.1) с учетом (3.8) описывается дифференциальным уравнением вида
 mx— = _*y2_/V. at
mx— = _*y2_/V. at
Решения записанного в общем виде уравнения (3.17) относительно времени и пути торможения зависят от конкретного вида зависимости для силы упора винта РСу которое должно быть подставлено в это уравнение.
Начало исследованиям торможения судна в нашей стране было положено в 50-е годы В. Г. Бакаевым л В. М. Лаврентьевым, предло
жившими для определения текущих значений Ре использовать диаграммы винтовых характеристик, полученных по результатам модельных испытаний гребных винтов в опытных бассейнах. Расчетная схема, основанная на данном предложении, предусматривала пошаговое численное интегрирование уравнения (3.17), т. е. требовала громоздких вычислений.
Проанализировав результаты, даваемые дайной расчетной схемой, М. А. Гречин (ЦНИИМФ) предложил считать полезную силу упора в процессе торможения постоянной величиной, численно равной значению силы упора в режиме на швартовах, т. е.
 Рр ~ Р\ц в ~ COnst.
Рр ~ Р\ц в ~ COnst.
Коэффициент k с учетом квадратичной зависимости силы сопротивления от скорости определяется выражением:

|
(3.19)
где V'o — исходное значение скорости, м/с;
R0 — полная сила сопротивления воды при скорости Vo, Н.
Подстановка (3.18) и (3.19) в дифференциальное уравнение
(3.17) дает

|
(3.20)
 После разделения переменных получается выражение для времени активного торможения от начальной скорости Ун до текущей V:
После разделения переменных получается выражение для времени активного торможения от начальной скорости Ун до текущей V:
(3.21)
dV х, dV
а после подстановки = V —^-------- соответствующее выражение
 для тормозного пути
для тормозного пути
(3.22)
В результате интегрирования выражений (3.21) и (3.22) получены рабочие формулы для расчета времени и пути торможения (время, с; путь, м):
для пассивного торможения (Ршв=0):
для активного торможения (РШв>0) : m* V,
/ =
 УЛ.Рп
УЛ.Рп
ршв
jn*Vi_ (3.26)
 2Rt I V \* P,
2Rt I V \* P,

Следует отметить, что сложный характер переходных гидродинамических процессов при реверсировании гребного винта, не имеющих пока строгих теоретических решений, делает необходимыми экспериментальные исследования, результаты которых позволяют оценивать адекватность математических моделей.
Пример такой оценки иллюстрирует рис. 3.2, на котором приведены результаты натурных измерений скорости с интервалом 0,5 уз на двухвинтовом дизель-электроходе «Черное море» при выполнении следующих маневров торможения: ПХП—ПХЗ; МХП—ПХЗ, СМХП— ПХЗ, ПХП—Стоп. На этом же рисунке показаны графики V(t) для соответствующих маневров, построенные по формулам (3.23) — маневр ПХП—Стоп и (3.25) —^остальные маневры. Необходимые для
расчетов значения коэффициента сопротивления k ) и с#лы
упора винта Ршв были предварительно найдены по этим же формулам из условия равенства значений расчетного и экспериментального времени торможения, чем обеспечивается возможность оценки математической модели путем сравнения с данными эксперимента.
Сравнение показывает, что (см. рис. 3.2) рассчитанный график V(t) для маневра ПХП—Стоп (пассивное торможение) вполне удовлетворительно соответствует экспериментально измеренным скоростям. Что же касается маневров торможения с реверсированием двигателей, то на участках графиков активного торможения наблюдается существенное расхождение между расчетной и экспериментальной скоростью. Расчетные графики V(t) располагаются ниже фактических значений скорости.
 Такой систематический характер отклонения приводит к тому, что расчетные тормозные пути (значения пути пропорциональны площади, ограниченной графиком скорости) получаются меньше их действительных значений.
Такой систематический характер отклонения приводит к тому, что расчетные тормозные пути (значения пути пропорциональны площади, ограниченной графиком скорости) получаются меньше их действительных значений.
Обработка результатов натурных испытаний, выполненных на различных судах, позволила получить следующие выводы.
1. Характер снижения скорости при пассивном торможении, выражаемый экспериментальными графиками V (0, вполне удовлетворительно согласуется с квадратичной зависимостью силы сопротивления от скорости (3.3).
2. Оценка графиков У(/) для ак
тивного торможения показывает, что эффективная сила упора винта после реверсирования от начального значения, близкого нулю, возрастает постепенно и достигает некоторого максимального значения к моменту остановки судна относительно воды.
Регрессионный анализ результатов экспериментов позволил получить эмпирическое выражение, удовлетворительно аппроксимирующее значение полезной силы упора винта Ре при торможении в виде:
^шах ^ 1 уЪ (3.27)
где V — текущее значение скорости при активном торможении, м/с;
VH — скорость в момент реверсирования винта (начальная скорость активного торможения), м/с;
Ртах — максимальная сила упора винта, которая достигается к моменту остановки судна относительно воды, Н.
Подстановкой (3.27) в (3.17) после простых преобразований и использования обозначения
кУГ
выражающего отношение максимальной силы упора винта к максимальной силе сопротивления воды, получим дифференциальное уравнение движения судна при торможении в окончательном, удобном для интегрирования виде
(з!9>
Назовем константу а коэффициентом активности торможения.
После разделения переменных получим выражение для времени торможения
mx/k Г dV
~vj~ • (3 M)
а
V*
dV w dV
а после подстановки —^— = V■ в соответствующее выражение для тормозного пути
mxfk ? VdV /oolv
J— • (З-ЗО
V*
Коэффициент активности торможения для разных конкретных условий может быть меньше единицы, больше единицы, равен единице или равен нулю. В каждом из перечисленных случаев меняется вид исходного уравнения (3.29), следовательно, меняется и вид его решений.
Приведем решения уравнения (3.29) относительно времени и пути торможения в зависимости от значений константы а.
а < 1
(1+1/ГГТ)(,. у ,/7П)
_______ l„i-------------- У v- У • ; (3.33)
Путь торможения при:
О < а 1
In Ц- ; (3.36)
2(1—в) „ V*
(1 —а) уг -f- а
| (■-*> |
 | |||
| |||
s=T£',,1_v!"- (3-38)
Дифференциальное уравнение (3.29) и его решение (3.32—3.38) представляют собой математическую модель торможения, разработанную в ОВИМУ на основе анализа результатов натурных испытаний судов.
Данная модель способна воспроизводить любое практически встречающееся изменение скорости при активном торможении. Это обеспечивается тем, что изменяющаяся по закону (3.27) сила упора винта в сумме с силой сопротивления (3.3) может давать суммарную тормозящую силу как возрастающую (а>1), так и снижающуюся (а< 1) в процессе торможения, т. е. описывать как выпуклые, гак и вогнутые графики V(t) разной степени кривизны вплоть до предельного случая, каковым является пассивное торможение (а=0).
Дата добавления: 2016-07-09; просмотров: 1222;