Судно как объект управления
Морское судно как транспортное средство совершает движение на границе двух сред — воды и воздуха, испытывая при этом гидродинамическое и аэродинамическое воздействия. ,
Для обеспечения заданных параметров движения (например, движение постоянным курсом или по требуемой криволинейной траектории, движение с заданной скоростью или изменение скорости) судном необходимо управлять. В указанном смысле судно является управляемой системой.
В соответствии с теорией управления каждая управляемая система состоит из трех частей: объекта управления (т. е. то, чем управляют), средства управления (с помощью чего управляют) и управляющего устройства (что управляет — автомат или человек).
Управление в обобщенном понимании это такая организация того или иного процесса, которая обеспечивает достижение определенных целей, соответствующих задаче управления. При этом цель управления сводится к поддержанию или изменению какой-то величины, от которой зависит состояние системы в процессе управления. Такие величины в теории управления называются координатами, а та из них, поддержание или изменение которой является целью управления, — управляемой координатой.
Так, например, при плавании в открытом море вдали от навигационных опасностей, задача управления заключается в переходе судна из одной точки в другую по прямолинейной траектории, что достигается выдерживанием заданного курса с периодической его корректировкой после получения обсерваций. В этом случае курс является управляемой координатой, а поддержание его постоянного значения и периодические коррекции являются в соответствующие периоды времени целью управления.
Мгновенными значениями ряда координат управляемой и неуправляемых определяется состояние судна (управляемЬ# системы) в данный момент. В рассмотренном примере такими координатами являются курс, скорость, угол дрейфа, поперечное смещение относительно линии генерального курса и т. п. Такие координаты, определяющие состояние системы и сами являющиеся следствием управления, называются выходными координатами. В отличие от них координаты, являющиеся причинами управляемого движения, называются входными. В приведенном примере входными координатами являются угол перекладки руля й частота вращения гребного винта.
При выборе значений входных координат, характеризующих состояние средств управления (руль, гребной винт), управляющее уст-
ройство (судоводитель, рулевой или авторулевой), руководствуются значениями выходных координат. Такая связь между следствием и причиной называется обратной связью.
Отметим, что рассмотренная управляемая система является замкнутой, так как в ней действует управляющее устройство (в данном случае — судоводитель). Если же по какой-либо причине управляющее устройство перестает функционировать, то система становится разомкнутой, а характер поведения объекта управления (корпуса судна) в данном случае будет определяться тем состоянием, в котором зафиксированы средства управления (угол перекладки руля, частота и направление вращения винта).
Вообще говоря, в состав морского судна входит много различных систем, которыми необходимо управлять (главный двигатель, якорное устройство и др.), каждая из которых в общем случае содержит три указанные выше составные части.
На приведенном примере были кратко рассмотрены наиболее общие принципы функционирования управляемых систем.
В данном учебнике рассматривается главным образом управление движением судна в горизонтальной плоскости, которое обычно сводится к задаче перехода судна из одной точки в другую по заданной траектории.
Отметим, что точно такая же по форме задача управления рассматривается и в курсе «Навигация», однако указанное совпадение задач управления имеет лишь формальный характер.
В навигации изучаются задачи управления судном, движение которого происходит обычно с постоянной скоростью на более или менее значительном расстоянии от берегов и других навигационных опасностей, что позволяет рассматривать судно (объект управления) как материальную точку.
Что же касается дисциплины «Управление судном», то в ней изучаются задачи управления судном, движение которого происходит с изменяющейся скоростью в непосредственной близости от препятствий, т. е. на расстояниях, сопоставимых с размерами самого объекта управления, что исключает возможность рассматривать его как точку.
Если в задачах навигации движение судна обычно называют плаванием, то при управлении судном его движение называется маневрированием.
При управлении судном приходится учитывать такие его характеристики, как длину, ширину, форму и размеры подводной и надводной частей корпуса, а также характеристики судовых средств управления— основных и вспомогательных.
Приходится учитывать также соотношение между глубиной и осадкой, так как при маневрировании на мелководье, а также вблизи стенок канала возникают силы гидродинамического взаимодействия, существенно влияющие на поведение судна как объекта управления.
Управление судном особенно усложняется при маневрировании в условиях ветра, воздействие которого сильно влияет на характер поведения объекта управления и эффективность управляющих устройств.
Сравнительно сложный характер поведения судна, обусловленный как свойствами самого объекта управления, так и влиянием многих внешних факторов, делает процесс маневрирования весьма напряженным, требующим от судоводителя не только глубоких познаний, но и высоких психомоторных качеств — наблюдательности, умения анали-
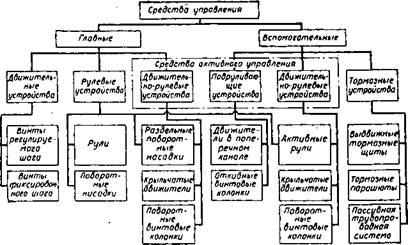 Рис. 1.1. Классификация средств управления
Рис. 1.1. Классификация средств управления
|
зировать и оценивать обстановку, быстроты реакции, способности обоснованно принимать ответственные решения, а также умения организовать работу людей, участвующих в процессе управления.
Рассмотрим в общих чертах основные характеристики средств управления.
Все средства управления (СУ), которые устанавливаются или могут устанавливаться на судах, подразделяются на две основные группы: главные средства управления (ГСУ) и вспомогательные средства управления (ВСУ).
Средства управления в каждой из указанных групп делятся по цели управления на два вида устройств: устройства, управляющие движением судна, а также разгоном и торможением в продольной плоскости (вперед или назад), и устройства, управляющие угловым движением, т. е. курсом и угловой скоростью.
Схема классификации СУ представлена на рис. 1.L В соответствии с данной классификацией к ГСУ относятся главные двйжитель- ные устройства (ГДУ) и рулевые устройства (РУ), а к ВСУ — подруливающие устройства (ПУ) и дополнительные тормозные устройства (ДТУ). Кроме указанных, существуют комбинированные устройства, позволяющие управлять как поступательным, так и угловым движением судна. Это главные движительно-рулевые устройства (ГДРУ), относящиеся к ГСУ, и вспомогательные движителы^о-рулевые устройства (ВДРУ), относящиеся к ВСУ. Отметим, что приведенная схема классификации СУ (см. рис. 1.1) не является общепринятой. В различных литературных источниках по управляемости судов встречаются и другие варианты классификации.
Те устройства, которые способны создавать боковую силу при неработающем главном двигателе и (или) отсутствии хода судна относительно воды, принято называть средствами активного управления (САУ). На схеме (см. рис. 1.1) САУ обведены пунктирной линией.
Характеристики САУ, а также ДТУ будут рассмотрены в 4 гл. настоящего раздела.
С точки зрения управления судном, интерес главным образом представляют рабочие органы устройств. Для главных движительных устройств такими органами на морских транспортных судах чаще всего бывают винты фиксированного шага (ВФШ) или винты регулируемого шага (ВРШ), а для рулевых устройств — руль (перо руля). Рассмотрим основные характеристики указанных рабочих органов.
Гребной винт представляет собой систему лопастей (от 2 до 8), каждая из которых является участком винтовой поверхности.
Сила упора, создаваемая винтом при его вращении с заданной частотой, зависит от его основных геометрических характеристик: диаметра DB, шага Я, дискового отношения 0 и числа лопастей z, а также от скорости самого судна. Существенное влияние на силу упора оказывает взаимодействие винта с корпусом судна. Силу упора без учета такого взаимодействия называют упором изолированного винта, а с учетом взаимодействия — полезным упором или тягой.
Для ВФШ изменение направления упора достигается реверсированием двигателя (изменением направления вращения гребного вала). ВФШ имеет максимальный коэффициент полезного действия (КПД) только при одном ^выбранном при проектировании режиме движения (для транспортных судов это обычно скорость полного переднего хода),
ВРШ позволяет за счет дистанционного поворота лопастей менять шаг винта и получать максимальный КПД при любом режиме движения. Изменение направления упора ВРШ осуществляется соответствующим поворотом лопастей без реверсирования главного двигателя.
На двухвинтовых судах гребные винты противоположного вращения устанавливаются симметрично относительно диаметральной плоскости (ДП). Направление вращения обычно выбирается таким образом, чтобы на переднем ходу лопасти вращались наружу.
Руль (перо руля) представляет собой крыло за кормой судна, способное поворачиваться с помощью баллера вокруг вертикальной оси на углы 30—35° вправо и влево. На отклоненном от ДП руле при движении в потоке воды возникает поперечная ДП сила, создающая момент относительно вертикальной оси, проходящей через центр тяжести судна. Эта сила при данном угле перекладки пропорциональна квадрату скорости потока воды, обтекающей перо руля, и зависит от геометрических характеристик руля и его размещения относительно гребного винта.
Основными геометрическими характеристиками, определяющими эффективность руля как управляющего устройства, являются площадь SP и высота h (по баллеру), а также размерения и форма подводной части корпуса.
Эффективность руля, установленного за гребным винтом, существенно возрастает за счет струи, отбрасываемой винтом при его работе передним ходом. По этой причине эффективность руля, расположенного в ДП, на одновинтовых судах существенно выше, чем на двухвинтовых. Поэтому на двухвинтовых судах иногда устанавливают два пера руля за винтами, что резко улучшает поворотливость таких судов.
Свойства крыла применительно к корпусу судна следующие. Корпус судна в подводной и надводной частях представляет удлиненное тело, симметричное относительно ДП, т. е. подобен вертикальному крылу симметричного профиля.
Теория крыла, рассматриваемая в гидромеханике судна, позволяет определить характер распределения аэро- и гидродинамических воздействий на корпус при его движении на границе двух сред и найти величину, направление и точку приложения
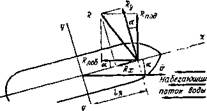 равнодействующих этих сил, а х\-(х—' у г значит аэро- и гидродинамический моменты относительно вер- рис j 2. Гидродинамическая сила Rt при- тикальной оси. Эти данные в со- ложенная к корпусу судна, и ее проекции четанин с силами и моментами,
равнодействующих этих сил, а х\-(х—' у г значит аэро- и гидродинамический моменты относительно вер- рис j 2. Гидродинамическая сила Rt при- тикальной оси. Эти данные в со- ложенная к корпусу судна, и ее проекции четанин с силами и моментами,
приложенными к корпусу со стороны средств управления, определяют поступательное и угловое движение судна данной массы.
Теоретические расчеты сил и моментов, возникающих на корпусе судна, сложны, трудоемки, поэтому не всегда могут использоваться при практическом маневрировании. Тем не менее существуют общие закономерности, знание которых имеет большое значение для правильной оценки и предсказания поведения судна как объекта управления.
Для получения этих закономерностей рассмотрим основные свойства крыла применительно к корпусу судна.
1. Если крыло перемещается прямолинейно в потоке воды или воздуха под некоторым углом атаки, то, помимо силы лобового сопротивления, направленной противоположно движению, возникает также подъемная сила, направленная перпендикулярно набегающему потоку. Величина подъемной силы в первом приближении пропорциональна углу атаки. Она может существенно превышать силу лобового сопротивления, в связи с чем равнодействующая этих сил не совпадает с направлением потока, а отклонена в сторону траверзного направления.
2. Точка приложения равнодействующей силы смещена по ДП от центра площади крыла навстречу потоку. Величина этого смещения (плечо поперечной проекции гидродинамической силы) тем больше, чем острее угол атаки. При углах атаки, близких к 90°, плечо стремится к нулю, т. е. точка приложения приближается к центру площади; для надводной части — к центру парусности (ЦП), для подводной — к центру площади проекции погруженной части на ДП, называемому центром бокового сопротивления (ЦБС).
Применительно к подводной части корпуса углом атаки является угол дрейфа, а к надводной — курсовой угол кажущегося ветра
При изучении вопросов управления судном удобнее рассматривать вместо сил, связанных с направлением движения, проекции их равнодействующей на судовые оси — продольную X и поперечную Y.
На рис. 1.2 в качестве примера показаны гидродинамическая сила R и ее составляющие (подъемная /?гюд и лобового сопротивления Ялов), а также проекции силы R на судовые оси (поперечная Ry и продольная /?х). Очевидно, что поперечная гидродинамическая сила Ry создает относительно вертикальной оси, проходящей через центр тяжести (ЦТ) судна, момент RvIr.
Отметим, что ЦБС располагается всегда вблизи ЦТ, а положение ЦП зависит от архитектуры надводной части и от дефферента судна.
Все силы, действующие на судно, по принятой в настоящее время классификации разделяются на три группы: движущие, внешние и реактивные.
К движущим относят силы, создаваемые средствами управления с целью придания судну требуемого линейного и углового движения. К таким силам относятся упор гребного винта, боковая сила руля, силы, создаваемые САУ, и т. п.
К внешним относятся силы давления ветра, волнения моря, течения. Эти силы, обусловленные внешними источниками энергии, в большинстве случаев создают помехи при маневрировании.
К реактивным относятся силы и моменты, возникающие в результате движения судна под действием движущих и внешних сил. Реактивные силы зависят от линейных и угловых скоростей.
По своей природе реактивные силы и моменты разделяются на инерционные и неинерционные.
Инерционные силы и моменты обусловлены инертностью судна и присоединенных масс жидкости. Эти силы возникают только при наличии ускорений — линейного, углового, центростремительного.
Инерционная сила всегда направлена в сторону, противоположную ускорению. При равномерном прямолинейном движении судна инерционные силы не возникают.
Неинерционные силы и их моменты обусловлены вязкостью забортной воды, следовательно, являются гидродинамическими силами и моментами. При рассмотрении задач управляемости обычно, как уже отмечалось в п. 1.1, используется связанная с судном подвижная система координат с началом в ц. т. Положительное направление осей: X — в нос; У — в сторону правого борта; Z — вниз. Положительный отсчет углов принимается по часовой стрелке, однако с оговорками в отношении угла перекладки, угла дрейфа и курсового угла ветра.
За положительное направление перекладки руля принимают перекладку, вызывающую циркуляцию по часовой стрелке, т. е. перекладку на правый борт (перо руля при этом разворачивается против часовой стрелки).
За положительный угол дрейфа принимается такой, при котором поток воды набегает со стороны левого борта и, следовательно, создает положительную поперечную гидродинамическую силу на корпусе. Такой угол дрейфа возникает на правой циркуляции судна.
Общий случай движения судна описывается системой из трех дифференциальных уравнений движения: двух уравнений сил — по продольной X и поперечной Y осям и уравнения моментов вокруг вертикальной оси Z.
Эта система в несколько упрощенном варианте имеет вид: dVv
{т-\ Хп) -^--И/п+Хм) Vyv=—Rx — Ррх + Ре — Ах\ dV,,
(т | Ха2)—~ < (m-ЬХц)Ух <•> -= Я гг -Рру-\ Ау* 0*1)
йы
(J } Х*,) ^ - f Mq -\ МА>
где т — масса судна;
Хн —присоединенная масса при движении i»o оси Х\
Я22 — присоединенная масса при движении по оси У;
Vx — проекция скорости судна на ось Х\
Vy — проекция скорости судна на ось Y\ о> — угловая скорость судна;
J — момент инерции судна относительно оси Z;
Хее — момент инерции присоединенных масс относительно оси 1\
Rx — продольная гидродинамическая сила на корпусе;
Ry — поперечная гидродинамическая сила на корпусе;
Я, — полезная сила упора гребного винта;
Яр* — продольная сила давления воды на руль;
РрУ —поперечная сила руля;
Аж —продольная аэродинамическая сила;
Ау —поперечная аэродинамическая сила;
Мл — момент гидродинамической силы на корпусе;
Мр — момент поперечной силы руля;
Мл — момент аэродинамической силы.
В левых частях системы (1.1) стоят инерционные силы и моменты: в первых двух уравнениях — соответствующие проекции силы ннер- цин и центробежной силы, а в третьем уравнении — инерционный момент относительно вертикальной оси. В правых частях стоят неинерционные силы и моменты, записанные в общем виде. Все неннерцион- ные силы и моменты, входящие в систему (1.i), выражаются нелинейными зависимостями от поступательной и угловой скоростей, поэтому данная система не может быть проинтегрирована до конца при строгой постановке. Однако система в принципе может решаться численными методами с помощью ЭВМ для моделирования движения судна при маневрировании. Решение же в конечном виде возможно только для частных случаев движения и при некоторых упрощающих допущениях.
Так, первое уравнение системы (1.1) характеризует движение судна по оси X при разгоне и торможении, поэтому его решения позволяют оценивать инерционно-тормозные характеристики судов. Решения второго уравнения, описывающего закономерности поперечного смещения, позволяют получить зависимости для дрейфа судна на циркуляции и под влиянием ветра. Третье уравнение, характеризующее угловое движение, используется при оценке управляемости судов.
В последующих главах при более подробном рассмотрении указанных характеристик судов мы будем обращаться к соответствующим уравнениям системы (1.1).
Контрольные вопросы. 1. Из каких частей состоит любая управляемая система в соответствии с теорией управления? 2. В чем заключается различие между замкнутой и разомкнутой управляемыми системами? 3. Какие координаты являются входными по отношению к судну как объекту управления? 4. В чем заключается основная особенность средств активного управления? 5. При каком условии сила инерции судна по продольной оси равна нулю? в. При каком условии отсутствует центробежная сила инерции судна?
Глава 2. СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ 2.1. Устойчивость на курсе и поворотливость
Управляемость зависит как от свойств самого судна, определяемых комплексом корпус — рулевое устройство — винт и скоростью, так и от внешних условий: ветра, волнения, глубины и рельефа дна при плавании на мелководье, глубины и ширины канала при плавании в узкосшх. Следует особо остановиться на оценке влияния скорости судна на его управляемость, гак как это влияние проявляется неоднозначно. Гидродинамические силы и моменты на руле и корпусе судна пропорциональны квадрату скорости набегающего потока, поэтому при движении судна с установившейся скоростью независимо от ее ибсо- лютного значения, соотношения между указанными силами и моментами остаются постоянными. Следовательно, на разных установившихся скоростях траектории (при одинаковых углах перекладки руля) сохраняют свою форму и размеры. Но если в процессе маневра изменить частоту вращения винта, то изменится скорость потока, набегающего на руль, расположенный за винтом. При этом момент, создаваемый рулем, изменится сразу же, а гидродинамический момент на корпусе судна будет изменяться медленно по мере изменения скорости самого судна, поэтому прежнее соотношение между этими моментами временно нарушится, что приведет к изменению кривизны траектории. При увеличении частоты вращения винта кривизна траектории увеличится (радиус кривизны уменьшится), и наоборот. Когда скорость судна придет в соответствие с новой частотой вращения винта, кривизна траектории снова станет равной первоначальному значению.
Все сказанное выше справедливо для случая штилевой погоды. Если же судно подвергается воздействию ветра определенной силы, то в этом случае управляемость существенно зависит от скорости судна: чем скорость меньше, тем больше влияние ветра на управляемость.
Управляемость характеризуется главным образом двумя свойствами судна: устойчивостью на курсе и поворотливостью.
Дата добавления: 2016-07-09; просмотров: 2983;