Обгрунтуйте методи розвитку та контролю силових якостей спортсмена. 5 страница
4.9. Динамічна і статична діяльність м'язів
Діяльність м'язів проявляється у виконанні рухів, пов'язаних з переміщенням тіла або його частин у просторі (динамічна діяльність) і в утриманні тіла або його частин в певному положенні (статична діяльність).
Динамічна діяльність супроводжується вона позмінними скороченнями і розслабленнями м'язів і виконанням роботи, яку називають динамічною роботою.
Динамічна робота завжди характеризується певною потужністю (N), яка може бути визначена як відношення величини виконуваної роботи (А) до часу її виконання (t), або як добуток сили (F) на швидкість скорочення м'яза (v), тобто
N = A / t = F × v
Експериментально встановлено, що максимальну потужність м'яз розвиває, коли навантаження і швидкість скорочення становлять 30% від максимальної івеличини.
Тривалість виконання динамічної роботи залежить від її потужності. Ця залежність виражається гіперболічною кривою (рис. 10, Б), з якої видно, що динамічна робота невеликої потужності може виконуватись необмежено довго, а при збільшенні потужності до максимальних величин динамічна робота триває секунди.
Ньютонометр (Нм) дорівноює 9,81 кгм.
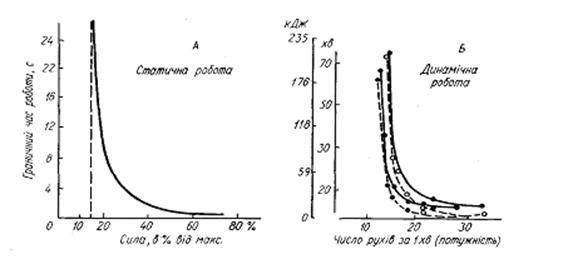
Рис. 4.9. Показники статичної (А) та динамічної (Б) витривалості:
А — зв'язок між силою скорочення (у процентах від максимальної) і тривалістю його утримання; Б — залежність максимального часу (суцільні лінії) та максимальної динаміч< ної роботи (переривчасті лінії) від потужності роботи, тобто від частоти рухів (вісь абсцис). Робота складалася з піднімання вантажу 6 кг з різною частотою. Основний працюючий м'яз — триголовий м'яз плеча.
При статичній діяльності м'язи не скорочуються, тому їх зовнішня робота дорівнює нулю.
Але розвиток і підтримання ізометричного напруження потребують певних витрат енергії. Тому у фізіології тривале ізометричне напруження позначають як статичну роботу. Величина статичної роботи визначається добутком сили напруження (F) на тривалість його підтримання ( t ). Максимальна тривалість статичної роботи у значній мірі залежить від величини напруження. Ця залежність представлена на графіку (рис. 10, А), з якого видно, що коли сила напруження (F) дорівнює 20% від максимальної, статична робота може виконуватись досить тривалий час (десятки хвилин). Збільшення сили напруження всього на 10% призводить до різкого зменшення тривалості статичної роботи. Коли сила напруження досягає 80% від максимальної, тривалість статичної роботи дорівнює 15 ... 20 с. Залежність тривалості статичної роботи від сили напруження може бути представлена аналітичнo спрощеною формулою:
t = K макс/ (F / Fмакс )n
де К – константа,
n – показник ступеня, що дорівнює приблизно 2,5.
Статична робота швидко викликає стомлення і не може продовжуватись тривалий час. Особливо стомлюючою статична робота є для дітей. Але існують види статичної діяльності м'язів, які можуть продовжуватись досить довго. Це напруження м'язів, що забезпечують положення тіла в полі сили земного тяжіння або підтримання певної пози при виконанні фізичних вправ, трудової діяльності. Такі тривалі напруження називають тонічною формою статичної діяльності, або м'язовим тонусом. Тонус м'язів має рефлекторне походження. Тонічне напруження м'язів виникає внаслідок почергової роботи різних рухових одиниць під впливом імпульсів від мотонейронів. Активність мотонейронів підтримується і регулюється імпульсами від пропріорецепторів м'язів і імпульсів від вищих відділів центральної нервової системи.
Тонічні напруження перш за все підтримуються завдяки скороченню повільних і спеціальних тонічних рухових одиниць, які, як відомо, можуть перебувати в режимі тетанічного скорочення при невеликій частоті подразнення. Здатність працювати при низькому ритмі і великі енергетичні ресурси забезпечують їм можливість перебувати в напруженні тривалий час [4, 5]
4.10. Енергетика скорочення м'язів
Безпосереднім джерелом енергії для скорочення м'язів є розщеплення АТФ (АТФ → АДФ + -г-Н3РО4 + 42 кДж). Але кількості АТФ у м'язах (приблизно 5× 10-6 моль/г) вистачає лише для кількох поодиноких скорочень. Тому ресинтез АТФ повинен йти безперервно. АТФ синтезується в результаті перенесення багатого на енергію фосфату з креатин-фосфату на АДФ. Ця реакція каталізується креатинкіназою. Креатин фосфорилюється в результаті окислювального (аеробного) або гліколітичного (анаеробного) розщеплення глюкози і м'язового глікогену.
Але анаеробний шлях ресинтезу креатинфосфату дуже неефективний. Він триває лише до того часу, поки не вичерпається запас глікогену в м'язах. При цьому в м'язових волокнах, а потім і в крові накопичується молочна кислота, яка при певних концентраціях зменшує активність ферментів, і тим самим порушує обмін речовин у м'язах.
В аеробних умовах вуглеводи розщеплюються до кінцевих продуктів (СО2 і Н20), а звільненої при цьому енергії вистачає для ресинтезу креатинфосфату і утворення АТФ.
Анаеробні умови в організмі людини виникають при виконанні роботи великої і максимальної потужності, коли киснево-транспортна система не забезпечує доставку м'язові необхідної кількості кисню.
Теплопродукція м'язів. Як уже зазначалось, коефіцієнт корисної дії м'язів не перевищує 30%, тобто більша частина енергії хімічних перетворень витрачається не на механічну роботу, а перетворюється на тепло. Процеси теплопродукції м'язів і нервів було детально вивчено А. Хіллом за допомогою високочутливих термопар.
Встановлено, що в скелетних м'язах при короткочасному тета-нусі, одночасно з ростом напруження, звільняється значна кількість тепла. Це тепло називають початковою теплопродукцією. За механізмом виникнення початкову теплопродукцію поділяють ще на теплоту активації, теплоту скорочення і теплоту розслаблення. Теплота активації — це сума термохімічних процесів, які підготовляють скорочення (вивільнення іонів кальцію, приєднання їх до активних центрів актину і міозину, розпад АТФ). Теплота скорочення утворюється в результаті перетворення хімічної енергії на механічну. Утворення теплоти розслаблення пов'язують із хімічними реакціями, оберненими тим, які відбулися при скороченні. Після повного розслаблення м'яза ще деякий час спостерігається виділення тепла, його називають запізненим теплом, або теплотою відновлення. Воно пов'язане з хімічними процесами, що забезпечують ресинтез АТФ. Теплота відновлення за своєю величиною дорівнює теплоті скорочення.
При тривалих тетанічних напруженнях виділяється невелика кількість тепла, яка називається теплом підтримання напруження. Таким чином, при динамічній роботі утворюється значно більше тепла, ніж при статичній. Утворене в м'язах тепло використовується для підтримання температурного гомеостазу в організмі.
4.11. Поняття про робочу гіпертрофію м'язів
Наслідком систематичних фізичних тренувань є збільшення анатомічного поперечника м'язів - робоча гіпертрофія. Вона розвивається в основному за рахунок потовщення існуючих м'язових волокон (від 10 до 100 мкм). Розрізняють два основних типи робочої гіпертрофії м'язів: саркоплазматичний і міофібрилярний.
Саркоплазматична гіпертрофія відбувається переважно за рахунок збільшення обсягу нескоротливої частини м'язового волокна -саркоплазми. Міофібрилярна гіпертрофія розвивається переважно за рахунок збільшення числа і обсягу міофібрил, збільшення щільності їх укладки в м'язовому волокні. Даний тип гіпертрофії м'язів сприяє значному збільшенню сили м'язів.
У звичайних умовах життя у людини розвивається змішана (саркоплазматично-міофібрилярна) гіпертрофія з перевагою, в залежності від професійної діяльності, першого або другого типу. У спортсменів направленість гіпертрофії визначається характером тренувань. Саркоплазматична гіпертрофія розвивається при виконанні великого обсягу динамічних вправ, міофібрилярна — при виконанні вправ з великими м'язовими напруженнями (більше 70% від максимальної довільної сили м'язів).
Протилежна робочій гіпертрофії є атрофія м'язів від бездіяльності. Атрофія - це часткова смерть протоплазми м'язової клітини у ще живому організмі. При атрофії спостерігається зменшення товщини м'язових волокон, у них зменшується вміст скоротливих білків, енергетичних речовин, в серцевому м'язі з'являються ділянки некрозу, в шлунку -виразки. Атрофія часто розвивається у людей, що тривалий час хворіють і знаходяться на ліжковому режимі, у людей з травмованими нервами, перерізаними сухожилками або з гіпсовими пов'язками. Прямим наслідком атрофії є зменшення маси м'язів і зниження їх працездатності. При своєчасному відновленні рухової активності наслідки атрофії поступово зникають.
v Питання для самоперевірки та контролю знань:
1. Сформулюйте поняття про руховий апарат людини як матеріальну основу руху.
2. Охарактеризуйте будову м'язових волокон.
3. Наведіть фізіологічну характеристику рухових одиниць м'язів.
4. Складіть порівняльну таблицю форм і типів м'язових скорочень.
5. Порівняйте поодинокі та тетанічні скорочення. Визначте види тетанусу та залежність форми тетанусу від частоти імпульсів.
6. Поясніть сутність характеристичних кривих м'язів.
7. Визначте силу і роботу м'язів як фізичні категорії.
8. Порівняйте динамічну і статичну діяльність м'язів.
9. Назвіть відомі Вам типи гіпертрофії м'язів.
Тема 5. Біомеханіка опоно – рухового апарату людини
Зміст
5.1. Геометрія мас тіла.
5.2. Поняття про ступені свободи і зв’язки рухів.
5.3. Ланки тіла як важелі та маятники.
5.4. Властивості біомеханічної системи.
Висока складність будови опорно – рухового апарату людини, з одного боку робить складними самі рухи, а з іншого – обумовлює високу різноманітність рухів. Біомеханічна наука використовує здобутки досліджень анатомії та фізіології опорно – рухового парату. Руховий апарат людини являє собою саморухому систему, яка складається із 600 м’язів, 200 кісток і кількох сотень сухожилків.
5.1. Геометрія мас тіла.
Геометрія мас тіла – це розподіл мас між ланками тіла і в середині цих ланок. Кількісно геометрія мас тіла описується мас – інерційними характеристиками – маса тіла, радіус інерції, момент інерції і координати центра мас.
Маса – це кількість речовини, яка міститься в тій чи іншій ланці. Маса – це також міра інертності тала: чим більша маса, тим вища інертність. При коловому русі інертність залежить не лише від маси, але і від того як вона розміщена відносно осі обертання: чим більша відстань від ланки до осі обертання, тим більший вклад цієї ланки у загальну інертність тіла. Кількісною мірою інертності тіла є момент інерції (J), який визначається як добуток маси тіла (m) на квадрат радіуса інерції (R2)
J = mR2ін
Центром мас тіла називається точка, в якій пересікаються лінії дії в сіх сил, що приводять тіло в поступальний рух і не викликають його обертання.
В полі гравітації центр мас співпадає з центром тяжіння – точкою, до якої прикладено рівнодіючу сил тяжіння всіх частин тіла.
Біомеханічна система – це спрощена копія, модель тіла людини, на якій можна вивчати рухи тіла. З погляду біомеханіки опорно – руховий апарат людини являє собою саморухому біомеханічну систему, структурною одиницею якої є ланка.
Ланка – це частина тіла, що розташована між двома сусідніми суглобами, або між суглобом і дистальним кінцем.
В тілі людини нараховують 70 ланок, але в практичній роботі використовується 15 – ланцюгова модель: голова, верхній відділ тулуба, плече, середній відділ тулуба, передпліччя, нижній відділ тулуба, кисть, стегно, гомілка, стопа.

В 15 – ти ланцюговій моделі деякі ланки складаються з кількох елементарних ланок, тому такі ланки називаються сегментами.
В.М. Селуянов визначив, що маси сегментів можна визначити за рівнянням:
mx = B0 + B1m + B2H
де mx - маса сегмента;
m – маса тіла, кг;
H – зріст, см;
B0, B1, B2 – табличні коефіцієнти (Додаток 4)
Рис. 5.1. 15 – ти ланцюгова модель тіла людини[15]
Володіючи даними про масу і моменти інерції ланок тіла і розташування їх центрів маси, практично можна визначити а) кількість руху – величину, що дорівнює добутку маси тіла на швидкість його переміщення; б) кінетичний момент – величину, що дорівнює добутку моменту інерції тіла на кутову швидкість; в) оцінити складність керування швидкістю тіла; г) визначити ступінь стійкості тіла.
Ланки утворюють біомеханічні пари. Біомеханічні пари – це рухоме з’єднання 2 ланок, в якому можливості рухів визначаються будовою з’єднання й управляючою дією м’язів. Ланки відносно своєї пари мають від 1 до 3 ступенів свободи, які регламентуються біомеханічними характеристиками суглобових з’єднань. Майже всі біокінематичні пари переважно шарнірні, деякі допускають поступальне ковзання ланок одна відносно іншої і лише одна пара – гомілкостоповий суглоб – гвинтовий рух.
Біокінетичні пари утворюють біокінетичні ланцюги – послідовне або розгалужене з’єднання ряду біокінетичних пар. Складовими елементами ланцюгів є сухожилки, зв’язки, суглоби, м’язи, мотонейрони, кістки. Кістки, зв’язки, сухожилки, суглоби є пасивними елементами біомеханічних систем. Активною частиною є м’язи та мотонейрони.
Розрізняють замкнені та незамкнені біокінетичні ланцюги. У незамкнених ланцюгах є остання ланка, що входить лише в одну пару. У незамкненому ланцюзі немає вільної кінцевої ланки. У незамкнутому ланцюгу, можливі ізольовані рухи у кожному окремо взятому суглобі. Під час виконання рухових дій у незамкнутих ланцюгах рух відбувається, як правило в багатьох суглобах, хоча і не виключена можливість ізольованих рухів. У замкнутих ланцюгах ізольовані рухи в одному суглобі не можливі: у рух включаються й інші з’єднання.
5.2. Поняття про ступені свободи і зв’язки рухів
Якщо у фізичного тіла немає ніяких обмежень (звязків), воно може рухатися в просторі у всіх трьох вимірах, тобто відносно трьох взаємноперпендикулярних осей (поступальний рух), а також навколо них (обертовий рух). Таке тіло має 6 ступенів свободи. (Рис 5.2.)
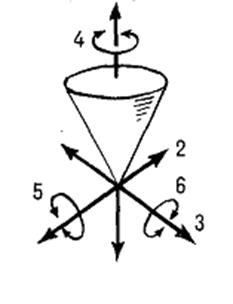
Рис. 5.2. Тіло, що має 6 ступенів свободи
Кожен зв’язок тіла зменшує ступінь його свободи. Фіксація тіла, яке стає ланкою пари, позбавляє його 3 ступенів свободи. Прикладом є кульшовий кулеподібний суглоб, що має 3 ступеня свободи (Рис 5.3.)
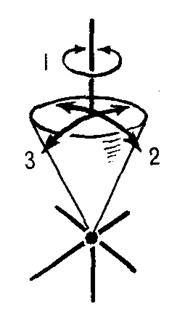
Рис. 5.3. Тіло з 3 ма ступенями свободи
Закріплення двох точок залишає тілу один ступінь свободи – міжфаланговий суглоб. (Рис 5.4)
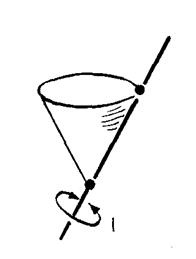
Рис.5.4. Тіло з одним ступенем свободи
Закріплення третьої точки взагалі позбавляє ланку свободи рухів (Рис 5.5.). Такі з’єднання до суглобів не відносяться.

Рис. 5.5. Тіло, що не має ступенів свободи
В анатомії виділяють також двовісні суглоби, які формуються внаслідок невідповідності за формою суглобових поверхонь – суглоб променево – зап’ястковий і п’ястково – фаланговий 1 – го пальця.
Високий ступінь свободи кінематичної пари в суглобах, що мають багато осей, потребує для виконанння кожного визначеного руху : а) вибору необхідної траекторії; б) управління напрямком і величиною швидкості руху ланки; в) регуляції рухів [15].
5.3. Ланки тіла як важелі та маятники
Прикладені до ланок сили діють на них як на важелі. Це дозволяє передавати дію сил по біокінетичному ланцюгу на віддаль, а також змінювати ефект прикладених сил.
Всі сили, що прикладені до ланки як до важеля, об’єднуються у дві групи:
А) сили, що лежать в площині осі важеля – вони не можуть викликати рух навколо цієї осі;
Б) сили, що лежать в площині, яка перпендикулярна до осі важеля – вони можуть впливати на рух навколо цієї осі в двох основних напрямках;
Розглядаючи вплив сил на важелі, враховують тільки сили, спрямовані по ходу руху (рушійні сили) та проти нього (гальмівні сили).
Коли групи сил прикладені по обидві сторони від точки опори важеля, його називають двоплечовим, або важелем першого роду, а коли по одну сторону – одноплечовим, або важелем другого роду. (Рис. 5.6. )
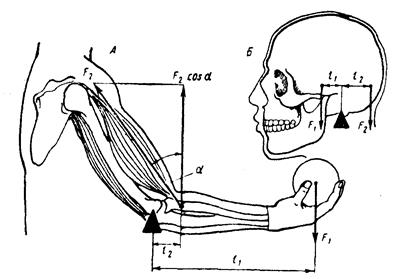
Рис. 5.6. Приклади двоплечового (А) та одноплечового (В) важелів
Кожен важіль складається із 4 елементів:
1. Точка опори (О)
2. Точка прикладення сили (А);
3. Плече важеля – відстань від точки опори до лінії дії сил (l);
4. Плече сили – відстань від точки опори до лінії дії сили (d).
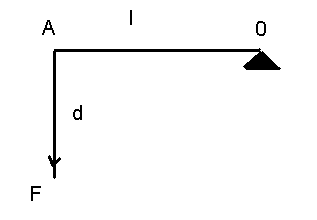
Рис. 5.7. Схематична будова важеля
У двоплечових важелях діючі на них сили розташовані з обох боків точки опори. Це важелі рівноваги, або спокою. Приклад – зчленування черепа з хребтом. У даному випадку точка прикладення сили руху (м’язи шиї) знаходяться позаду точки опори. Точка сили протидії (гравітаційна сила) лежить позаду неї.
В одноплечових важелях сили , що діють на них розташовані з одного боку від точки опори. Серед одноплечових важелів розрізняють важіль сили і важіль сили і швидкості.
Прикладом важеля сили є стопа, тут точкою опори є кістки плесна, точкою протидії є тяжість тіла, що зосереджена на таранній кістці. Силою, що піднімає тіло, є м’язи, прикріплені до п’яткової кістки. У даному випадку плече сили довше ніж плече протидії.
Важелі будуть знаходитися в рівновазі, якщо рівні моменти протидіючих сил. Якщо переважають моменти сил руху, то рух ланок прискорюється. Якщо переважають сили гальмування, то рух ланок гальмується. При прискоренні м’язи скорочуються і виконують переборюючу роботу. При гальмуванні м’язи розтягуються і виконують поступальну роботу.
Сили, які зумовлюють рух створюються м’язами, а протидіють руху – сили гравітації.
Ланка тіла, яка продовжує після розгону свій рух по інерції є подібною до фізичного маятника. Класичний маятник, виведений з рівноваги, спочатку під дією сили тяжіння качається вниз, а потім втрачаючи кінетичну енергію, піднімається по інерції вверх.
Період коливання маятника визначається за формулою:
Т = 2π √ l / mgr
l – момент інерції маятника відносно осі, що проходить через точку підвісу;
m – маса маятника;
g – прискорення вільного падіння;
r – радіус ЦМ, тобто відстань між точкою підвісу і ЦМ.
При значних коливаннях (коливання ніг приходьбі та бігові) частота коливань залежить від амплітуди. Крім того, двжина маятника при згинанні і розгинанні ноги змінюється, тому нога як маятник власної постійної частоти не має.
Ноги людини здійснюють власне коливальні рухи (низькочастотні 1,2 Гц і високочастотні 30 – 50 Гц). Цим кінцівки схожі з маятником. Власне частота коливань не залежить від маси тіла, але залежить від довжини маятника. Чим довший маятник тим менша частота власних коливань. Найменші витрати спостерігаються тоді, коли частота рухів, наближається або більша на 20 – 30% від частоти власних коливань руки або ноги. При найбільш економічному поєднанні частоти і довжини кроків людина демонструє підвищену фізичну працездатність. Резонансна частота – частота коливань близька до власних коливань. Вона зумовлена тим, що коливальні рухи верхніх і нижніх кінцівок супроводжуються рекуперацією механічної енергії. Рекуперація енергії – збереження або повернення енергії. Найпростіший приклад рекуперації – перехід потенційної енергії в кінетичну, а потім навпаки, потім знову і т.д. отже виконання рухів з типом близьким до резонансного є ефективним засобом збереження енергії.
Прискорення ланки як маятника залежить від прикладеного моменту сили і моменту інерції маятника, тому щоб збільшити прискорення, потрібно збільшити або силу, або плече або зменшити радіус інерції.
Групова взаємодія мязів
Діяльність м’язів в біокінематичних ланцюгах ніколи не буває ізольованою – мязи приймають участь у рухах групами. Мязи, що оточують суглоб, функціонують , утворюючи спільні функціональні групи: а) спільної дії - синергісти і б) протилежної дії - антагоністи
5.4. Властивості біомеханічної системи
Біомеханічна система характеризується процесами рухової діяльності, її енергозабезпечення і управління руховими діями. Властивості біомеханічної системи дозволяють регулювати підхід і витрати енергії і управління рухами в змінних умовах при зміні рухових завдань.
Енергетичне забезпечення рухів
Механічна енергія характеризується двома основними показниками – надходження та використання.
Надходження енергії має два джерела:
· Робота зовнішніх сил – енергія надходить із зовні;
· Внутрішнє перетворення – перетворення хімічної енергії в механічну.
Використання механічної енергії проходить у двох основних напрямках:
· Ефективний напрямок – використання енергії на виконання цілеспрямованих рухів;
· Мимовільний напрямок – розсіювання енергії (Дисипація енергії)
При виконанні рухів в біомеханічній системі проходять деформації, які бувають 3 – ох основних видів:
· Позиційна деформація – зміна пози як взаємного розміщення ланок під дією внутрішніх і зовнішніх сил;
· М’язова деформація – зміна довжини і поперечного перерізу м'язів при їх скороченні і розтягненні;
· Внутрішня деформація – зміщення м’яких і рідких тканин при прискореннях, що викликає появу внутрішніх сил інерції та тертя.
Пристосувальна активність біомеханічної системи
Висока ефективність рухів, а також відповідність нервової імпульсації, початкових умов руху, стану організму та умов рухового завдання забезпечується пристосувальною активністю біомеханічної системи.
На біомеханічну систему можуть здійснювати вплив велика кількість оточуючих тіл (снаряди, партнери, противники), середовище та особливості опори. Всі перелічені фактори відносяться до зовнішніх сил, вони характеризуються високою змінністю, напрямком і місцем прикладення. Внутрішні активні сили, до яких відносяться сили м’язової тяги також непостійні. Внутрішні пасивні сили (пружність, в’язкість, тертя ) також дуже змінні. Все це викликає відповідні складності при передачі силового зусилля. На відміну від твердих фізичних тіл, де прискорення всього тіла виникає в момент прикладення сил, в людському тілі прискорення може виникати з деяким запізненням – ефект запізнення. Кількісно виразити це запізнення дуже важко, оскільки воно визначається великою кількістю факторів.
Наявність ефекту запізнення не виключає можливості того, що під впливом сигнального подразнення організм підготується до виконання рухової дії і майбутнього очікуваного впливу. Цей ефект носить назву – ефект випередження. Він можливий лише в тому випадку, коли імпульси із центральної нервової системи будуть відповідними до початкових умов руху – тяга м'язів, прикладені сили, положення і швидкість ланок.
Тобто для створення відповідності між рухом і руховим завданням потрібне управління з врахуванням зовнішніх і внутрішніх умов, що забезпечується пристосувальною активністю біомеханічної системи.
Пристосувальна активність – це сукупна відповідність між нервовим імпульсом, силою тяги м'язів, і рухам відповідної ланки.
v Питання для самоперевірки та контролю знань:
1. Дайте визначення термінів „геометрія мас тіла” та „цент мас тіла.”.
2. Вкажіть яка залежність існує між кількістю ступенів свободи і характером руху ланки тіла. Наведіть приклади.
3. Визначте ланки тіла як важелі та маятники. Наведіть приклади.
4. В чому полягає принцип групової взаємодії м’язів.
5. Охорактеризуйте властивості біомеханічної системи.
Тема 6. Біомеханіка рухових якостей спортсмена
Зміст
6.1. Поняття про рухові якості людини.
6.2. Біомеханічна характеристика силових якостей.
6.3. Біомеханічна характеристика швидкісних якостей.
6.4. Біомеханічна характеристика витривалості.
6.5. Біомеханіка стійкості та координації.
6.6. Біомеханічна характеристика гнучкості.
6.1. Поняття про рухові якості людини
Кожна людина володіє певними руховими можливостями. Вся сукупність рухових можливостей називається моторикою. Рухові можливості людей суттєво відрізняються як кількісно так і якісно.
Руховими якостями називають окремі якісні сторони моторики людини.
Поняття „рухові якості” об’єднує ті сторони моторики, які відповідають двом основним характеристикам:
· Проявляються в однакових характеристиках рухів і мають однакову величину вимірювання (наприклад, максимальна швидкість);
· Мають аналогічні фізіологічні та біомеханічні механізми і потребують прояву однакових властивостей психіки.
Як наслідок цього, методика удосконалення певної рухової якості має однакові методики у різних видах спорту. Наприклад, витривалість у плаванні і ковзанярському спорті тренується майже однаково.
Руховим завданням називають рух із суворо встановленими умовами виконання – не просто біг, а біг на 200м, не просто штовхання ядра, а штовхання ядра масою 7257г.
Коли під час рухового завдання ставиться мета показати максимальний результат, то використовують поняття максимальної сили, швидкості і тривалості рухового завдання. Прояв цих значень залежить від заданих параметрів (умов) руху – довжина дистанції, вага снаряду тощо. Якщо змінюються параметри, то змінюються і їх значення. Така залежність називається параметричною.
Іноді при заданих параметрах (оптимальна маса штанги чи ядра) спортсмен може показати максимальний результат в силі, швидкості чи витривалості. За цих умов дані величини називають лімітними, а залежність непараметричною.
6.2. Біомеханічна характеристика силових якостей
Сила дії людини – це міра впливу її на зовнішнє фізичне оточення, яка передається через робочі точки (сила тиску на опору, сила тяги на гриф штанги). Сила — це здатність людини долати зовнішній опір або протистояти йому за рахунок м'язових зусиль.
Сила дії людини, як і будь – яка інша сила, може бути представлена у вигляді вектора і визначена за значенням: напрямку, скалярної величини і точки прикладення. Сила діїї людини залежить від стану організму, вольових зусиль і від зовнішніх параметрів, зокрема від параметрів рухового завдання.
Силові здібності виявляються не самі по собі, а через яку-небудь рухову діяльність. При цьому на прояв силових здібностей впливають різні чинники, внесок яких у кожному конкретному випадку змінюється в залежності від конкретних рухових дій і умов їх здійснення, виду силових здібностей, вікових, статевих і індивідуальних особливостей людини (Таблиця 6.1).
Таблиця 6.1.
Чинники, що впливають на прояв силових здібностей людини
| № п/п | Група чинників | Складові чинники |
| Власне м'язові чинники | Ø скоротливі властивості м'язів (співвідношення білих і червоних м'язових волокон); Ø активність ферментів м'язового скорочення; Ø потужність механізмів анаеробного енергозабезпечення м'язової роботи; Ø фізіологічний поперечник і маса м'язів; Ø якість міжм'язової координації. | |
| Центрально-нервові чинники | Ø інтенсивність (частота) ефекторних імпульсів, що надсилаються до м'язів; Ø координація скорочень і розслаблень м’язів; Ø трофічний вплив центральної нервової системи на функції м’язів. |
Продовження таблиці 6.1.
Дата добавления: 2016-06-13; просмотров: 1928;