Ранг неопределенности модели
С целью однозначного и неизбыточного представления моделей систем управления на разных этапах исследования введено понятие «ранг наопределенности»  причинно-следственных отношений моделей, которое отражает степень информативности (полноту знаний) о системе и внешней среде, т.е. топологии (структуре) ситсемы, характере и видах операторов связей элементов системы и внешней среды, значениях их параметров.
причинно-следственных отношений моделей, которое отражает степень информативности (полноту знаний) о системе и внешней среде, т.е. топологии (структуре) ситсемы, характере и видах операторов связей элементов системы и внешней среды, значениях их параметров.
В результате представления моделей  на соответствующем ранге снимается неопределенность о модели:
на соответствующем ранге снимается неопределенность о модели:
на топологическом – неопределенность о топологии;
на структурно-операторном – неопределенность о структурах операторов;
на параметрическом – неопределенность о параметрах.
Исходным этапом получения математического описания системы, например, в виде частной модели  , является выделение множества переменных
, является выделение множества переменных  . Указанное множество называют моделью системы нулевого ранга неопределенности (
. Указанное множество называют моделью системы нулевого ранга неопределенности (  ) и обозначают как
) и обозначают как  . Геометрически данная модель представляет собой совокупность точек (вершин), т.е. нуль-граф. Нулевой ранг можно назвать элементным.
. Геометрически данная модель представляет собой совокупность точек (вершин), т.е. нуль-граф. Нулевой ранг можно назвать элементным.
4.3. Модели первого (топологического) ранга
неопределенности
Теоретико-множественный (теоретико-графовый) способ представления. Множество переменных и заданное на этом множестве полинарное (  е, многоместное), в частности, бинарное (двуместное), отношение
е, многоместное), в частности, бинарное (двуместное), отношение  называют моделью первого ранга неопределенности
называют моделью первого ранга неопределенности  . Отношение представляет собой множество из неупорядоченных между собой переменных
. Отношение представляет собой множество из неупорядоченных между собой переменных  , в частности, двоек
, в частности, двоек  . При однородности всех индексированных переменных достаточно указывать только их индексы:
. При однородности всех индексированных переменных достаточно указывать только их индексы:  ,
,  .
.
В общем случае, топологическим (структурным) представлением го отношения является гиперграф.
Неориентированным гиперграфом (просто гиперграфом) называют тройку множеств  , в которой
, в которой  – множество вершин;
– множество вершин;  – множество ребер;
– множество ребер;  – инцидентор (двуместный предикат), определенный на множестве всех пар
– инцидентор (двуместный предикат), определенный на множестве всех пар  . Вершины и ребра составляют элементы гиперграфа
. Вершины и ребра составляют элементы гиперграфа  (предикат – это условие, т.е логическая функция, принимающая значения «истина-1» или «ложь-0»):
(предикат – это условие, т.е логическая функция, принимающая значения «истина-1» или «ложь-0»):

Указанное представление является теоретико-множественным (теоретико-графовым) способом задания модели систем первого ранга неопределенности.
Вершина  и ребро
и ребро  инцидентны, если
инцидентны, если  .
.
Вводят понятия множества вершин, инцидентных данному ребру (область инциденции ребра), и множества ребер, инцидентных данной вершине (область инциденции вершины). Мощности указанных множеств называют степенями, т.е. степенями ребер и степенями вершин.
Две вершины и  смежны в гиперграфе , если существует ребро, которому они инцидентны, т.е. соединены этим ребром.
смежны в гиперграфе , если существует ребро, которому они инцидентны, т.е. соединены этим ребром.
Два ребра смежные в гиперграфе , если существует вершина, инцидентная этим ребрам, т.е. связанная с этими ребрами.
Другой способ теоретико-множественного представления гиперграфа – через множество  ребер гиперграфа, заданных в виде подмножеств множества вершин:
ребер гиперграфа, заданных в виде подмножеств множества вершин:  . Другими словами, каждой вершине сопоставляется элемент множества , представляющий собой подмножество вершин, связанных ребрами с данной вершиной.
. Другими словами, каждой вершине сопоставляется элемент множества , представляющий собой подмножество вершин, связанных ребрами с данной вершиной.
Причинно-следственная модель системы первого ранга неопределенности характеризуется отношением , представляющим собой множество из  упорядоченных переменных , в частности, упорядоченных двоек , где первая по порядку следования переменная соответствует следствию, а остальные – причинам. Каждая упорядоченная последовательность переменных – элемент связей, – есть кортеж.
упорядоченных переменных , в частности, упорядоченных двоек , где первая по порядку следования переменная соответствует следствию, а остальные – причинам. Каждая упорядоченная последовательность переменных – элемент связей, – есть кортеж.
Модель  задает топологию системы. Число связей, т.е. мощность множества , обозначают
задает топологию системы. Число связей, т.е. мощность множества , обозначают  . С учетом причинно-следственных связей модель представляет собой ориентированный граф с
. С учетом причинно-следственных связей модель представляет собой ориентированный граф с  вершинами и
вершинами и  дугами.
дугами.
На рисунке 4.1 показан пример ориентированного графа (орграфа), который может описывать топологию линейной стационарной системы.
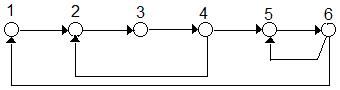
Рисунок 4.1 – Орграф линейной стационарной системы
Топология системы в виде бинарных отношений имеет следующее описание:  ;
;  ;
;  .
.
С использованием полинарных отношений топология имеет описание: ;  ;
;  .
.
Другим способом теоретико-множественного описания причинно-следственной модели в виде орграфа является задание множества переменных и отображения  , т.е.
, т.е.  . Отображение
. Отображение  , называемых множеством правых инциденций, показывает, причиной изменения каких переменных является переменная . Для системы, изображенной на рисунке 4.1, описание имеет вид:
, называемых множеством правых инциденций, показывает, причиной изменения каких переменных является переменная . Для системы, изображенной на рисунке 4.1, описание имеет вид:  ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Еще один способ – через использование обратного отображения  , показывающего, следствием изменения каких переменных является . Множество
, показывающего, следствием изменения каких переменных является . Множество  называю множеством левых инциденций. Для рассматриваемого примера имеем:
называю множеством левых инциденций. Для рассматриваемого примера имеем:  ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Алгебраический способ представления. Данный способ представления опирается на использовании матриц смежности, инциденций, изоморфности.
Матрица смежности  – квадратная матрица размерности
– квадратная матрица размерности  , где размерность вектора . Элемент
, где размерность вектора . Элемент  , если существует связь (дуга) между переменной-причиной
, если существует связь (дуга) между переменной-причиной  и переменной-следствием . Несвязанным переменным соответствует
и переменной-следствием . Несвязанным переменным соответствует  .
.
Для примера, показанного на рисунке 4.1, матрица смежности имеет вид:
Недостатком матриц смежности является их «разреженность», достоинством – возможность определения важных характеристик графа (наличие петель и контуров, изолированных элементов, тупиков и т.д) путем вычисления степеней матрицы смежности. В частности, для определения контура из  вершин, необходимо вычислить
вершин, необходимо вычислить  . Тогда на главной диагонали полученной матрицы будут ненулевые элементы в тех позициях, которые соответствуют вершинам, лежащим на контуре. Для определения всех контуров необходимо вычислить все степени матрицы смежности Эти операции используются, в частности, при анализе так называемых «информационных» графов, используемых при описании документооборота на предприятиях.
. Тогда на главной диагонали полученной матрицы будут ненулевые элементы в тех позициях, которые соответствуют вершинам, лежащим на контуре. Для определения всех контуров необходимо вычислить все степени матрицы смежности Эти операции используются, в частности, при анализе так называемых «информационных» графов, используемых при описании документооборота на предприятиях.
Матрица инциденций  , где число вершин,
, где число вершин,  число дуг, является прямоугольной матрицей, состоящей из элементов -1, 0, 1. При этом
число дуг, является прямоугольной матрицей, состоящей из элементов -1, 0, 1. При этом  , если элементы не связаны между собой;
, если элементы не связаны между собой;  , если дуга, соединяющая с , исходит из ;
, если дуга, соединяющая с , исходит из ;  , если дуга, соединяющая с , приходит в . Для примера рисунка 4.1. матрица инциденций имеет вид:
, если дуга, соединяющая с , приходит в . Для примера рисунка 4.1. матрица инциденций имеет вид:
Матрица изоморфности  имеет размер
имеет размер  , где число вершин, а
, где число вершин, а  максимальная степень вершин, определяемая по формуле
максимальная степень вершин, определяемая по формуле  , где
, где  число входящих дуг,
число входящих дуг,  число исходящих дуг. В
число исходящих дуг. В  ю строку матрицы
ю строку матрицы  со знаком «+» вписывают номера дуг, входящих в ю вершину, а со знаком «–» вписывают номера исходящих дуг. Название объясняется тем, что с помощью данной матрицы с точностью до изоморфизма (геометрического образа) можно восстановить диаграмму графа. В сравнении с матрицами смежности и инциденций матрица изоморфности наиболее компактная. Для примера рисунка 4.1. матрица изоморфности имеет вид:
со знаком «+» вписывают номера дуг, входящих в ю вершину, а со знаком «–» вписывают номера исходящих дуг. Название объясняется тем, что с помощью данной матрицы с точностью до изоморфизма (геометрического образа) можно восстановить диаграмму графа. В сравнении с матрицами смежности и инциденций матрица изоморфности наиболее компактная. Для примера рисунка 4.1. матрица изоморфности имеет вид:
Здесь использована следующая нумерация дуг: 1 – (2, 1); 2 – (3, 1); 3 – (4,1); 5 – (5, 4); 6 – (6, 5); 7 – (5, 6); 8 – (1, 6), где при обозначении дуг на первом месте указана вершина-приемник, на втором месте – вершина-источник.
Пример определения контуров. Для графа рисунка 4.1 имеют место три контура: (2, 3, 4), (5, 6), (1,2,3,4,5,6). Перемножая матрицы  , получаем:
, получаем:
 ,
,  ,
,
 .
.  ,
,
 .
.
Из  следует наличие контура из двух вершин (5, 6). Из
следует наличие контура из двух вершин (5, 6). Из  следует наличие контура из трех вершин (2, 3, 4). Из
следует наличие контура из трех вершин (2, 3, 4). Из  следует, что контуров длиной 4 нет, т.к. здесь на диагонали для контура длиной 4 должны быть 4 ненулевых элемента, а есть всего два. Из
следует, что контуров длиной 4 нет, т.к. здесь на диагонали для контура длиной 4 должны быть 4 ненулевых элемента, а есть всего два. Из  также следует, что контуров длиной 5 нет. Из
также следует, что контуров длиной 5 нет. Из  следует наличие контура (1, 2, 3, 4, 5, 6). Сравнивая полученные результаты с рисунком 4.1, видим, что изображенный граф содержит именно эти контуры.
следует наличие контура (1, 2, 3, 4, 5, 6). Сравнивая полученные результаты с рисунком 4.1, видим, что изображенный граф содержит именно эти контуры.
5. МОДЕЛИ СИСТЕМ УПРАВЛЕНИЯ ВТОРОГО и ТРЕТЬЕГО
РАНГОВ НЕОПРЕДЕЛЕННОСТИ
Дальнейшее раскрытие неопределенности моделей систем управления возможно при установлении структуры операторов связи между переменными – модель второго (структурно-операторного) ранга неопределенности. Данные модели определяют систему с точностью до параметров.
Существуют несколько форм представления таких моделей, рассмотренных ниже.
5.1. Представление моделей в форме пространства
состояний
Достоинством данной формы является однородный вид и возможность использования матричных операций. Традиционно данный аппарат применяется для описания линейных систем, однако его можно обобщить и на нелинейные системы. Характерными особенностями данного описания являются: 1) задание модели системы в виде системы дифференциальных уравнений первого порядка, разрешенных относительно производной, т.е. нормальной формы Коши; 2) учет входных воздействий в виде отдельного (для линейных или аффинных систем) векторно-матричного члена в правых частях дифференциальных уравнений; 3) учет выхода системы в виде отдельного векторно-матричного соотношения.
Модель состояния имеет вид:
 (5.1)
(5.1)
где  – вектор состояния размерности ;
– вектор состояния размерности ;  – вектор входов размерности
– вектор входов размерности  ;
;  – вектор выходов размерности .
– вектор выходов размерности .
Модель (5.1) нестационарная ввиду явной зависимости от текущего времени  . Для нелинейных систем, когда вектор-функции
. Для нелинейных систем, когда вектор-функции  и нелинейные, нестационарные системы легко сводятся к стационарным введением дополнительного дифференциального уравнения вида
и нелинейные, нестационарные системы легко сводятся к стационарным введением дополнительного дифференциального уравнения вида  , в результате чего размерность увеличивается на единицу, а модель приобретает стационарный вид
, в результате чего размерность увеличивается на единицу, а модель приобретает стационарный вид
 (5.2)
(5.2)
Линейная модель состояния – частный случай (5.1), когда:
 (5.3)
(5.3)
Линейную нестационарную систему (5.3) также можно свести к стационарной указанным выше способом, однако в общем случае эта замена приведет к появлению нелинейностей. По этой причине в линейной теории управления стационарные и нестационарные системы анализируются и синтезируются различными методами.
Дата добавления: 2016-04-02; просмотров: 1444;