Многомерные задачи оптимизации.
В большинстве реальных задач оптимизации целевая функция зависит от нескольких проектных параметров. Такая задача называется многомерной. Многомерная оптимизация представляет собой поиск наименьшего или наибольшего значения целевой функции
 , (14.1)
, (14.1)
заданной на множестве  , и определение проектных параметров, при которых целевая функция принимает экстремальное значение.
, и определение проектных параметров, при которых целевая функция принимает экстремальное значение.
Для решения подобной задачи в области проектирования , в которой ищется минимум целевой функции (13.1) можно использовать дискретное множество точек (узлов). Интервалы изменения параметров  разбиваются на части шагами
разбиваются на части шагами  . В полученных узлах вычисляется значение целевой функции, и среди них находим наименьшее. Такой метод поиска при многомерной оптимизации требует слишком большого объема вычислений.
. В полученных узлах вычисляется значение целевой функции, и среди них находим наименьшее. Такой метод поиска при многомерной оптимизации требует слишком большого объема вычислений.
Решение многомерной задачи оптимизации методом покоординатного спуска.
Первоначально выбирается некоторая точка  с координатами
с координатами  , как показано на рисунке (14.1). Затем фиксируются все координаты функции
, как показано на рисунке (14.1). Затем фиксируются все координаты функции  кроме первой и получаем функцию одной переменной
кроме первой и получаем функцию одной переменной  :
:
 . (14.2)
. (14.2)
Решая таким образом одномерную задачу оптимизации для этой функции, от точки переходим к точке 
 (см. Рис14.1). В ней функция принимает наименьшее значение по координате или первому проектному параметру при фиксированных остальных координатах. В этом состоит первый шаг процесса оптимизации, заключающийся в спуске по координате .
(см. Рис14.1). В ней функция принимает наименьшее значение по координате или первому проектному параметру при фиксированных остальных координатах. В этом состоит первый шаг процесса оптимизации, заключающийся в спуске по координате .
Следующий шаг заключается в фиксировании всех координат, кроме второй. Тогда целевая функция будет иметь следующий вид:
 . (14.3)
. (14.3)
Снова решая задачу одномерной оптимизации, находим наименьшее значение функции при  , т.е. в точке
, т.е. в точке 
 Аналогично производится спуск по координатам
Аналогично производится спуск по координатам  . В результате этого получаем последовательность точек , , …,
. В результате этого получаем последовательность точек , , …,  , в которых значение целевой функции составляет монотонно убывающую последовательность:
, в которых значение целевой функции составляет монотонно убывающую последовательность:
 (14.4)
(14.4)
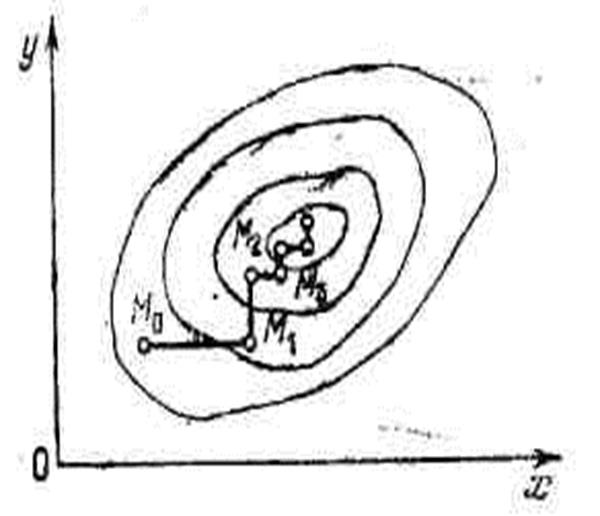
Рисунок 14.1 Пояснение к методу покоординатного спуска.
Таким образом, метод покоординатного спуска сводит задачу многомерной оптимизации к многократному решению одномерной оптимизации по каждому проектному параметру. Сходимость данного метода зависит от вида функции и выбора начального приближения.
Блок-схема метода покоординатного спуска.
Блок-схема данного метода показана на рисунке 14.2. В исходных данных задаются первоначальные значения всех проектных параметров и число этих параметров  . Затем выполняется нахождение целевой функции при исходных значениях всех проектных параметров. После чего определяется минимальное значение функции по одному параметру при фиксации всех остальных. Если не достигается требуемая точность
. Затем выполняется нахождение целевой функции при исходных значениях всех проектных параметров. После чего определяется минимальное значение функции по одному параметру при фиксации всех остальных. Если не достигается требуемая точность  , то вычисления продолжаются.
, то вычисления продолжаются.
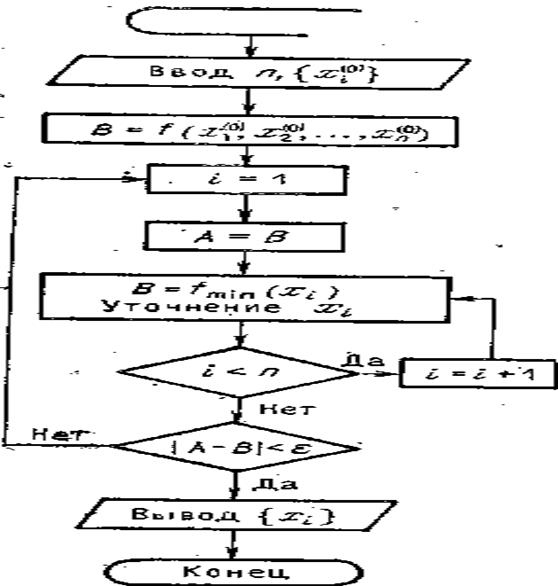
Рисунок 14.2 Блок-схема вычисления методом покоординатного спуска
Дата добавления: 2015-10-06; просмотров: 2733;