Система управления движением.
Теоретические основы управления судном.
Система управления движением.
Движение судна происходит на границе двух сред – воды и воздуха, поэтому на него действуют гидродинамические и аэродинамические силы. Величины, которые описывают состояние судна и его перемещение будем называть параметрами. Очень часто, особенно в теории корабля и автоматического управления, их называют координатами, что вызывает путаницу, при рассмотрении процессов маневрирования в судовождении.
Для обеспечения заданных параметров движения судном необходимо управлять. Управление в обобщенном понимании можно определить как, такая организация функционирования процесса движения судна, которая обеспечивает выполнение поставленных целей, способствующих выполнению функционального назначения судна.
Сам процесс движения с изменяющимися параметрами называется маневрированием. В указанном смысле судно является управляемой системой.
Системой называется, по определению профессора Овчинникова П.Ф., совокупность объектов любой природы, объединенных какими - либо (минимум одним) признаками. Такое определение является обобщенным. Уточняя такое определение, для процесса судовождения, можно предложить такую формулировку понятия "система управления судном": совокупность судовых устройств и элементов, обеспечивающих управление судном при выполнении производственных задач и маневрировании.
Основным свойством системы управления движением судна является его экстремальность. Она имеет двоякую природу. Во первых это означает, что задачей управления является достижение экстремума функции, которая описывает состояние объекта управления (на- пример прийти из одного порта в другой кратчайшим путем, за минимальное время и т.д.).
Во вторых вопрос об экстремальности управления встает при необходимости достижения цели управления минимальными затратами, т.е. использовать ее с максимальной эффективностью (например управление по курсу минимальным числом перекладок руля, с минимальными отклонениями от заданного пути и т.д.).
В первом случае экстремальность управления определяется экстремальностью целей этого управления. Во втором она связана с экстремальностью самого процесса управления. Это означает, что он должен быть оптимальным в определенном смысле. Таким образом управление обладает несколькими иерархическими уровнями, которые схематически изображены на рис.1.1.
При различной степени детализации и использовании других подходов такую иерархию можно строить и дальше. Практически иерархия управления движением судна невелика и существует до 2-го, 3-го уровня. Из рис 1.1. видно, что органами управления, на которые воздействует 2-ой уровень, являются, прежде всего цель и алгоритм 1-го уровня. Кроме того 2-ой уровень может воздействовать непосредственно на первый, с целью повышения эффективности его функционирования. Растригин Л.А. [11] считает, что экстремальное управление является универсальным, которое обобщает все другие способы.
 |
Рис.1.1. Блок-схема иерархической системы управления движением судна.
Применительно к процессу управления судном система имеет функциональную и пространственную замкнутость. По одну сторону стоит судно и его устройства, а по другую внешняя среда. У системы можно выделить составляющие объекты двух типов - множество устройств, элементов и множество связей. Процесс разделения системы на устройства и связи называется структуризацией.
В зависимости от количества устройств и элементов системы можно разделить на два вида: простые и сложные. Если в состав системы входит большое количество взаимосвязанных устройств и элементов различной физической природы, включая человека, которые взаимодействуют между собой для достижения единой цели, то система называется сложной. Поскольку в состав контура управления входит человек, то такие системы называются человеко-машинными (ЧМ). Таким образом, систему управления судном можно определить как сложную структурированную человеко-машинную систему. ЧМ система обладает свойством адаптивности, поскольку она позволяет решать основную задачу при изменяющихся условиях плавания.
Для изучения поведения сложной системы при различных режимах работы, необходимо создать ее модель. Здесь будет уместно отметить, что, несмотря на сложность системы управления судном, цель ее является достаточно четкой и описывается небольшим количеством критериев.
Сложную систему можно разделить на подсистемы, которые, обладая определенной самостоятельностью, подчинены единой цели функционирования системы в целом. Процесс декомпозиции (разделения) на подсистемы предназначен для анализа алгоритма ее функционирования и оптимизации структуры ее синтеза. Для того, чтобы определить важность подсистемы и ее место в системе управления предлагается рассматривать два вида подсистем - главная и подчиненная. Структура системы представляет собой фиксированную совокупность устройств и элементов, а также порядок взаимодействие между ними.
Для описания процесса функционирования системы ее изображают в виде графов, структурной или блок-схемы. Для понимания закономерностей взаимодействия между устройствами и элементами необходимо произвести их упорядоченное размещение в соответствии с существующими связями и поставленной функциональной задачей.
Организация системы управления судном состоит в том, чтобы определенным образом построить упорядоченное расположение судовых устройств и элементов, показать алгоритм их взаимодействия и порядок функционирования при управлении для достижения поставленной цели. При этом возможны различные способы организации системы. Каждый способ организации определяет ее структуру и набор различных устройств и элементов для обеспечения поставленной цели.
Различают структурную и функциональную организацию. При структурной организации определяется совокупность и назначение отдельных устройств и элементов. При функциональной организации определяется способ распределения обязанностей и взаимодействия между устройствами и элементами. Состояние системы характеризуется параметрами, описывающими ее начальное состояние и протекание процесса при управлении.
На систему действуют различные факторы, которые принято называть входные величины, и они численно характеризуются входными параметрами. Их будем подразделять на внутренние и внешние. Если источник воздействия лежит за пределами судна, то они называются внешними. Если воздействия происходят от судовых устройств, то они называются внутренними. Для судна, как объекта управления, внешними являются силы от воздействия ветра, течения, волнения, взаимодействия с причалом, от буксира, взаимодействия с другими судами и другие. Внутренними воздействиями являются силы от руля, движителя, подруливающего устройства. Их можно также подразделять на контролируемые, те, которые назначает судоводитель, и неконтролируемые, действующие на судно произвольно по времени и величине.
Реакция системы на эти воздействия описывается параметрами, которые называются выходными. Для судна, как объекта управления, выходными являются кинематические параметры движения судна и его координаты на земной поверхности. Выходные параметры, изменение либо сохранение значений которых является целью управления, называются управляемыми. Если управляемые параметры, характеризующие направление и скорость перемещения судна являются неизменными, то можно говорить о том, что судно движется в установившемся режиме. Если курс и/или скорость преднамеренно изменяются, то это означает, что судно маневрирует.
Управление системой представляет собой процесс сбора, обработки информации и выработки управляющего воздействия для изменения выходных параметров, с целью приведения системы в заданное состояние. Основой для функционирования любой системы - простой или сложной является заданный алгоритм ее работы (функционирования). Без выработки "заданного алгоритма функционирования системы", ее работа невозможна, поскольку именно таким способом задается цель и назначение данной системы или подсистемы. Кроме того необходимо особенно подчеркнуть, что при синтезе заданного алгоритма внешние возмущения не учитываются. Он определяется только конфигурацией акватории для маневрирования.
Сложность системы определяется количеством устройств и элементов, которые она содержит, а также числом целей, которые перед ней стоят. По числу целей системы бывают одно-целевыми и многоцелевыми. Количество устройств и элементов определяет число контуров управления, по которым проходят потоки информации. При этом преобладающим является, по - видимому, число целей. Например, подсистема управления якорным устройством имеет одну цель - отдача или выборка якоря, и один контур управления, поэтому ее логично назвать простой.
В зависимости от расположения источника воздействия или информации будем различать внутренний и внешний контуры управления. Внешним контуром будем называть путь прохождения информации, при котором ее источник расположен за пределами судна. Внутренним контуром будем называть путь прохождения информации, при котором ее источник расположен на самом судне.
Управление судном представляет собой многоцелевую задачу. При этом цели управления бывают различной природы и направленности. Они направлены на обеспечение навигационной и мореходной безопасности мореплавания, а также эффективного выполнения производственных задач. Наличие в контуре управления человека, при сбоях в функционировании системы, дает основание говорить о влиянии "человеческого фактора" на безопасность мореплавания и эффективность работы судна.
На основании многочисленного выполнения автором швартовок судов в море ( 1645) и в порту (980) был произведен анализ функционирования системы управления движением. В соответствии с полученными результатами выше, анализом и систематизацией существующих сведений в технической литературе по вопросу исследования процесса судовождения, структурную схему системы управления судном предлагается представлять так, как это приведено на рис. 1.2.
В соответствии с указанной схемой в системе можно выделить три главных подсистемы - "Управление движением судна", "Управление технической эксплуатацией судна" и "Управление экипажем судна". Для целей обеспечения навигационной безопасности мореплавания определяющее значение имеет подсистема "Управление движением судна".
Поскольку рассмотрение всех аспектов управления судном представляет собой многогранную задачу, мы в дальнейшем будем рассматривать только подсистемы обеспечения навигационной безопасности.
 |
|
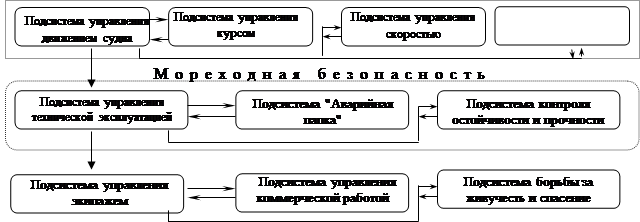
Рис.1.2. Структурная схема системы "Управление судном"
В самом общем виде целью (задачей) управления движением судна, является проводка его, по заданной на карте точками линии безопасного пути, с минимальными отклонениями.
При этом линия пути задается совокупностью прямолинейных и криволинейных участков. Задача управления движением может быть распределена по нескольким уровням- подсистемам и контурам управления (внешним и внутренним). Подчиненными по отношению к этой подсистеме являются подсистемы управления курсом, скоростью и решения задачи расхождения.
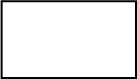
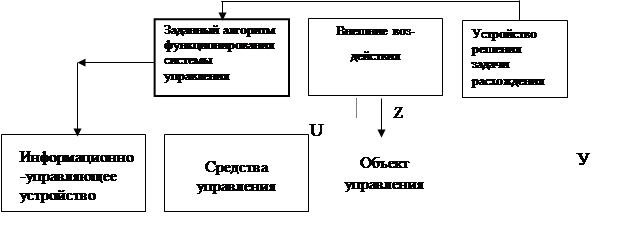
Систему управления движением судна можно представить в виде структурной схемы, представленной на рис.1.3.
 |
 |


|
|
|
|


 Хз
Хз

|
|

 У
У

 | |||
|
Объектом управления является корпус судна, который при рассмотрении процесса маневрирования будем представлять в виде траектории точки, расположенной в центре тяжести G.
Информационно-управляющее устройство, получая сведения о курсе, скорости судна, глубине моря, параметрах внешних воздействий и сигнале рассогласования вырабатывает команду на средства управления , для приведения системы в заданное состояние. В качестве элемента этого устройства входит человек-оператор (ЧО).
Средствами управления (устройства - рулевое, движительное, подруливающее, якорное, тормозные и буксиры) вырабатывается управляющее воздействие U, которое приводит систему в заданное состояние Х. Величину и продолжительность управляющего воздействия назначает судоводитель, который является ответственным за процесс маневрирования.
Внешние воздействия(Z) -ветер (угол дрейфа a), течение (снос от ветрового, приливного или постоянного течений bт), волнение(качка, слемминг, заливаемость), взаимодействия ( с судами при обгоне и расхождении на небольших расстояниях, с причалами, стенками каналов и фарватеров, дном моря) воздействуют на судно и вызывают его смещение относительно линии заданного пути. При этом существует два подхода: поправки на их учет вводят при выработке управляющего воздействия; поправки не учитывают при выработке управляющего воздействия, а их действие учитывается по величине сигнала рассогласования. В таком случае сигнал рассогласования может быть настолько большим, что управляющего воздействия будет недостаточно, чтобы привести систему в заданное состояние. Как следствие происходит потеря управления системой, возникают предпосылки для возникновения аварийного происшествия. Если координаты судна выходят за пределы допустимых, то возникает авария.
Заданный алгоритм функционирования системы управления движением определен технологически конфигурацией акватории для маневрирования и представляется в виде географических координат точек на карте, через которые судно должно и может пройти при перемещении и маневрировании. Обычно разрабатывается судоводителем на основании сведений о предстоящем переходе, содержащихся на картах, в лоциях и других пособиях. Он заключается в выборе прямолинейных участков пути и нанесении на карту или в память ЭВМ координат точек пересечения линий пути до и после поворота и прокладке или расчете истинных курсов из предыдущей в последующую. Для построения криволинейных траекторий требуется знание характеристик поворотливости и методов построения или расчета координат точек по их значениям. Необходимо особенно отметить, что он не зависит от внешних и внутренних воздействий. Другой особенностью является то, что он подлежит корректировке только тогда, когда навигационные условия плавания изменяются из-за наличия других судов, которые не позволяют безопасно пройти по линии заданного пути.
Если заданный алгоритм разрабатывается судоводителем устно, а контроль фактического положения производится визуально, без использования технических средств, то надежность системы управления существенно снижается. Обычно по этой причине происходит конфликт между капитаном и лоцманом. Заданный алгоритм функционирования системы управления разрабатывает лоцман, на основании знания им местных условий, и фактически управляет судном, а ответственность за его реализацию, несет капитан. При маневрировании в момент захода в порт и выполнении швартовных операций заданный алгоритм вырабатывается устно, а судном управляют на основании визуальной оценки его положения на акватории, как правило без использования технических средств.
Кроме того, он позволяет объяснить причину навигационных аварий. Можно предложить такое ее определение - "происшествие с судном в процессе маневрирования, при котором управляющего воздействия недостаточно для приведения его в заданное состояние".
Устройство решения задачи расхождения вырабатывает исходные данные для формирования заданного алгоритма функционирования системы управления движением с учетом наличия опасных судов и его корректировки при изменении ситуации сближения с ними.
Устройство сравнения оценивает значения фактических и заданных допустимых координат и вырабатывает сигнал рассогласования Хр, на основании которого информационно-управляющее устройство вырабатывают команду на средства управления. Если устройства сравнения нет и сигнал Хр не вырабатывается, то судно никогда на сможет выполнить поставленную цель управления и прийти в пункт назначения. Необходимо особо подчеркнуть, что система управления движением не может функционировать, без наличия информации о фактическом положении судна. Подсистема управления курсом и скоростью может работать без наличия информации о местоположении.
Устройство определения координат работает на основании использования различных способов получения данных о местоположении - астрономических, визуальных, РЛС, радионавигационных, спутниковых и других.
Устройство курсоуказания и скорости определяет направление движения судна по гироскопическому или магнитному компасам, а также скорость по лагу или оборотам винта.
Подсистема управления движением судна работает по следующему алгоритму. Заданный алгоритм функционирования системы управления движением вырабатывает координаты точек пути следования. Данные о фактическом положении, поступающие от устройства определения координат, и заданные координаты поступают в устройство сравнения и вырабатывается сигнал об отклонении Хр, значение которого поступает на информационно-управляющее устройство. Сюда же поступают данные о предыдущем заданном курсе, фактических координатах, информация о величине внешних воздействий. На основании полученных данных рассчитываются поправки курса на внешние воздействия и погрешности приборов, и определяется новое значение курса, которое приводит объект управления на линию заданного пути.
Приведенный алгоритм функционирования подсистемы управления движением судна будем называть работающим по внешнему контуру. В ее состав входят подчиненные подсистемы, которые, находясь в составе главной подсистемы, работают по внутреннему контуру и обеспечивают управление определенными устройствами и элементами.
Подсистема управления движением и подчиненные подсистемы образуют систему управления навигационной безопасностью. Блок-схема устройств, обеспечивающих навигационную безопасность движения судна при маневрировании, приведена на рис.1.4.
В процессе функционирования подсистемы управления движением используются основные, фундаментальные принципы, которые определяются способом учета влияния внешних возмущений и использования подсистемы управления курсом. Предлагается рассматривать четыре основных принципа: курсовой, курсовой по возмущению, курсовой по отклонению и комбинированный курсовой.
Курсовой принцип. Структурная схема подсистемы управления движением судна при курсо- вом принципе управления приведена на рис.1.5. Ее особенностью является отсутствие элементов - устройства определения координат, определения параметров и учета внешних воздействий и устройства сравнения. При функционировании системы работает только подсис-
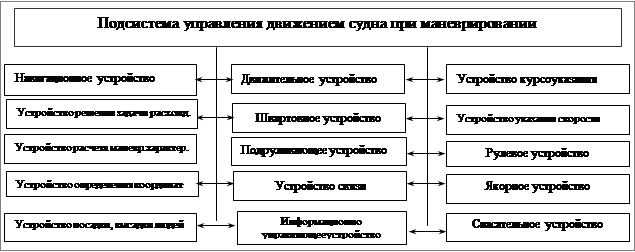
Рис.1.4. Блок - схема устройств, обеспечивающих навигационную безопасность.
тема управления курсом по внутреннему контуру. Заданный алгоритм функционирования вырабатывается вручную или автоматически, путем графического определения, аналитического расчета вручную или автоматически пути судна, исправляется поправками компаса и поступает в информационно-управляющую систему, которая автоматически или вручную поддерживает его значение постоянным. Влияние внешних условий, путем введения поправок на их воздействие на судно, не производится. Это не означает, что они отсутствуют, а просто их влияние не учитывается при выработке управляющего воздействия системы U.
Обычно при математическом описании системы управления движением объект управления рассматривают в виде "черного ящика" и описывают функциональную зависимость между управляющим воздействием на входе U, выходом Y и ее состоянием Х.
 |
Хз
 |

 | |||||
 | |||||
|
Курсовой по возмущению. . Структурная схема подсистемы управления движением судна при курсовом по возмущению принципе приведена на рис.1.6. Ее особенностью является отсутствие элементов - устройства определения координат, и устройства сравнения. При функционировании системы работает только подсистема управления курсом по внутреннему контуру, с учетом поправок на действие внешних возмущений. Заданный алгоритм функционирования вырабатывается вручную или автоматически, путем графического определения, аналитического расчета вручную или автоматически пути судна, исправляется поправками компаса и за счет действия внешних возмущений, поступает в информационно-управляющую систему, которая автоматически или вручную поддерживает его значение постоянным. Определение положения судна не производится из-за отсутствия системы определения места или возможности произвести такую процедуру.
 |

 Хз
Хз
 |

 | |||||||
| | |||||||
 | |||||||
|
Курсовой по отклонению. . Структурная схема подсистемы управления движением судна при курсовом по отклонению принципе приведена на рис.1.7. Ее особенностью является отсутствие элементов - устройства определения действия поправок на внешние воздействия. При функционировании системы работает подсистема управления курсом по внутреннему контуру без учета поправок на действие внешних возмущений, и внешнему контуру. Заданный алгоритм функционирования вырабатывается вручную или автоматически, путем графического определения, аналитического расчета вручную или автоматически пути судна, исправляется поправками компаса без учета действия внешних возмущений, поступает в устройство сравнения, вырабатывается сигнал рассогласования, который поступает в информационно-управляющую систему, которая автоматически или вручную приводит объект управления в заданное состояние. Влияние внешних условий, путем введения поправок на их воздействие на судно, не производится. Это не означает, что они отсутствуют, а просто их влияние не учитывается при выработке управляющего воздействия .
| |||
 | |||
|

 |
|
|
|
|
|
|
 Хз
Хз
 | |||
 | |||
|
 У
У

 | |||
|
Курсовой комбинированный. Структурная схема подсистемы управления движением судна при курсовом комбинированном принципе совпадает с обобщенной структурной схемой, приведенной на рис.1.3. Ее особенностью является наиболее полное присутствие устройств и элементов подсистемы. При функционировании системы работает подсистема управления курсом по внутреннему контуру с учетом поправок на действие внешних возмущений, и внешнему контуру. Заданный алгоритм функционирования вырабатывается вручную или автоматически, путем графического определения, аналитического расчета вручную или автоматически пути судна, исправляется поправками компаса и с учетом действия внешних возмущений, поступает в устройство сравнения, вырабатывается сигнал рассогласования, который поступает в информационно-управляющую систему, и она автоматически или вручную приводит объект управления в заданное состояние.
Предложенный системный подход к управлению движением судна позволяет аргументировано планировать организацию процесса его перемещения, с учетом маневренных характеристик, навигационной обстановки и интенсивности судоходства.
Рассмотренные принципы управления и приведенные их структурные схемы, позволяют строить различные модели управления движением судна, анализировать их функционирование, синтезировать систему и определять оптимальный ее состав для обеспечения безопасности мореплавания в различных условиях плавания. Кроме того, такой подход позволяет производить адекватное математическое описание процесса управления движением судна, формализовать и автоматизировать его .
Дата добавления: 2015-11-18; просмотров: 4489;