Средства обеспечения движения судна и его управляемости.
Движение морского судна относительно воды обеспечивается различного типа движителями, наиболее распространёнными из которых является гребной винт ‑ располагаемый за кормой судна.
Сила упора винта создаётся за счёт реакции струи, отбрасываемой винтом назад или вперёд в зависимости от направления вращения.
Грузовые суда чаще бывают одновинтовыми, а пассажирские - двухвинтовыми.
Полезная сила упора движителя-сила тяги Ре- равна(при прямолинейном и равномерном движении судна и отсутствии ветра) и прямо противоположна силе сопротивления воды R, т.е.
Ре=R (1.1)
Эффективность движителя, создающего полезную мощность за счёт подводимой к нему мощности двигателя, измеряется величиной пропульсивного коэффициента
 (1.2)
(1.2)
где Pe –сила тяги, кН; V-скорость судна, м/с; Np-подводимая к движителю мощность, кВт.
Силой тяги движителя и силой сопротивления воды определяется мореходное качество-ходкость судна, под которой подразумевается способность преодолевать сопротивление внешней среды и двигаться с заданной скоростью.
Основным и наиболее распространённым средством управления (СУ) судном является рулевое устройство, рабочим органом которого является руль(перо руля), располагаемый в корме судна.
Расположение руля в струе от винта повышает его эффективность. Так руль, расположенный в диаметральной плоскости на одновинтовом судне, более эффективен, чем на двухвинтовом. Иногда двухвинтовые суда имеют два пера руля, располагаемые за винтами, что резко повышает их эффективность.
Средства управления как движущий и управляющий, а, следовательно, неотъемлемый элемент судна существуют столько времени, сколько существует судоходство и судостроение. Первыми СУ были парус, весла, рули. С развитием судостроения появились новые типы СУ, конструкции, и свойства которых связаны с типом и назначением судов, условиями их эксплуатации, особенностями энергетических установок.
В настоящее время на транспортных судах применяются многие десятки различных видов СУ, а число запатентованных СУ исчисляется многими сотнями. Наибольшее число видов СУ используется на судах внутреннего и смешанного (река - море) плавания эксплуатируемых в сложных условиях ограниченного фарватера и требующих повышенных маневренных качеств.
СУ, обеспечивающие маневрирование судна, подразделяют на главные, вспомогательные и ограничивающие. Их классификация приведена на рис. 1.8.
Главные устройства управления.Главные СУ характерны тем, что для их использования необходима работа главных двигателей судна. К ним относятся главные движительные устройства судна, рулевые устройства, главные движительно-рулевые устройства.
Главные движительные устройствасоздают силу, приближенно по направлению совпадающую с диаметральной плоскостью судна, поэтому они используются, когда цель управления состоит в поддержании или изменении скорости судна. В качестве главных движительных устройств могут использоваться винты фиксированного шага (ВФШ), винты регулируемого шага (ВРШ), водометные движители и гребные колеса. ВФШ и ВРШ для повышения их эффективности могут быть помещены в неподвижные или поворотные насадки.
Винты фиксированного шага (ВФШ). Наиболее распространенными главными движителями водоизмещающих судов являются ВФШ. Объясняется это простотой конструкции ВФШ, удобством его размещения на судне и передачи вращающего момента, малым весом, надежностью и высоким к. п. д. (60—65%, иногда до 75%). На судне может быть установлена одновальная (одновинтовая), двухвальная (двухвинтовая) и более установки.
С точки зрения пропульсивных качеств наиболее эффективной является одновальная механическая установка ВФШ. В этом случае можно максимально уменьшить выступающие части и достигнуть наиболее высокого значения коэффициента влияния корпуса. Однако в некоторых случаях (невозможность установки, например, винта большого диаметра) приходится отказываться от такой установки. Увеличение числа гребных винтов диктуется требо-
ванием повышения живучести судна, а также стремлением повысить его экономичность путем применения разных двигателей для малых и полных ходов. В последнем случае особенно удобна трехвальная компоновка, когда средний винт (или бортовые винты) обеспечивает экономичный ход.
На больших пассажирских судах для достижения повышенной скорости требуемая мощность столь велика, что затруднительно использование суммирующего редуктора большой мощности. Это обстоятельство обусловило применение на таких судах двухвальной движительно-двигательной установки.
Трех- и четырехвальные установки применяются на быстроходных судах большого водоизмещения и ледоколах.
В одновальных гребных установках направление вращения гребного винта определяется направлением вращения двигателя. При следовании судна прямым курсом, когда руль расположен в диаметральной плоскости, оно может уходить с курса: вправо - при правом вращении гребного винта и влево - при левом его вращении (для некоторых судов в балласте при оголении винта и руля имеет место обратная закономерность). Причина этого явления - действие сил С (влияние работы гребного винта на перо руля; для винта правого вращения стремится повернуть корму влево), b (сила, возникающая из-за неравномерности поля скоростей, вызванной попутным потоком; для винта правого вращения стремится повернуть корму влево) и D (возникающей вследствие возникновения на нижней лопасти винта большей силы реакции чем на верхней; для винта правого вращения стремится повернуть корму вправо). Неравенство этих сил приводит к появлению их результирующей, которая в итоге и влияет на уклонение судна с курса. При установке на судне двух гребных винтов одинакового вращения результирующие силы от каждого винта суммировались бы и для компенсации потребовалась бы значительная перекладка руля. Поэтому на двухвинтовых судах направление вращения гребных винтов принимается противоположным. Наружное вращение гребных винтов (лопасти в верхнем положении движутся к борту) предпочтительнее и с эксплуатационной точки зрения. При этом уменьшается вероятность повреждения лопастей винта плавающими предметами, а также заклинивания гребного винта битым льдом. Исходя из этих соображений, наружное направление вращения придают гребным винтам трех- и четырехвальных судов. Средний винт у трехвального судна может вращаться так же, как и у одновального, т. е. в произвольную сторону.
Направление вращения внутренних гребных винтов четырехвального судна выбирается исходя из модельных испытаний каждой серии судов отдельно.
Винты регулируемого шага (ВРШ).Одна из первых конструкций винта регулируемого шага (ВРШ) была предложена в 1844 г. В то время пароходы еще сохраняли парусное вооружение. Когда такое судно шло только под парусами, лопасти винта ставили во флюгерное положение (по потоку). Это уменьшало сопротивление винта.
В дальнейшем, с применением в качестве главных двигателей дизелей, паровых турбин и, особенно, с появлением нереверсивных газовых турбин снова возрос интерес к ВРШ, теперь уже как к реверсивному устройству.
Все более широкое распространение ВРШ на морских судах объясняется еще и следующим. Известно, что обычный винт фиксированного шага (ВФШ) может использовать полную мощность двигателя только при определенном значении сопротивления движению судна. Если это сопротивление в процессе эксплуатации судна изменяется (например, при переходе со свободного хода на режим буксировки или траления), то винт будет соответствовать двигателю лишь при каком-либо одном значении сопротивления, а при остальных его значениях он будет либо «тяжелым» (двигатель не может развить полного числа оборотов при полной мощности), либо «легким» (винт не использует при полном числе оборотов полной мощности двигателя).
Для полного использования мощности двигателя при всех значениях сопротивления необходимо, чтобы каждому значению сопротивления соответствовал определенный шаг гребного винта. Идея совмещения серии гребных винтов различного шага в одном движителе и нашла воплощение в конструкциях ВРШ.
В настоящее время ВРШ устанавливают на судах различного назначения.
Состав установки ВРШ. Система управления всеми видами ВРШ принципиально одинакова. ВРШ проектируется так, чтобы поворот лопастей винта осуществлялся из рулевой рубки. Обычно установка ВРШ состоит из следующих основных элементов (рис. 1.9.):


гребной винт 1 с поворотными лопастями (ВПЛ); в ступице ВПЛ размещается механизм поворота лопастей (МПЛ);
гребной вал 2;
механизм изменения шага 3 (МИШ), состоящий из сервомотора, создающего усилие для поворота лопастей, устройства для подведения энергии к сервомотору и устройства, управляющего положением лопастей;
силовая часть системы управления 4, которая служит для преобразования имеющейся на судне энергии в такой вид, который наиболее удобен для подведения к сервомотору;
пост дистанционной системы управления 5, функции которого заключаются в непосредственном управлении регулирующим элементом силовой части (например, распределительным золотником в ВРШ с гидравлическим приводом).
Классификация ВРШ. ВРШ классифицируются по:
диапазону поворота лопастей:
всережимные - лопасти могут быть зафиксированы в любом положении внутри диапазона «Полный вперед» - «Полный назад»,
многопозиционные, обеспечивающие несколько режимов (чаще всего три),
двухпозиционные - лопасти могут быть зафиксированы только в двух положениях, соответствующих крайним точкам диапазона;
принципу создания усилия, необходимого для поворота лопастей, т. е. с приводом:
гидравлическим - усилие создается в гидравлическом сервомоторе,
электромеханическим - усилие создается электродвигателем,
механическим - усилие создается за счет энергии вращающегося гребного вала,
ручным - перекладка лопастей производится мускульной силой человека;
принципу построения системы управления винтом системы:
следящая - каждому положению управляющей рукоятки соответствует определенное положение лопастей, т. е. лопасть как бы «следит» за управляющим органом;
не следящая - отклонение рукоятки от нейтрального положения влечет за собой поворот лопасти, а возвращение ручки в нейтральное положение останавливает лопасть.
Наибольшее распространение получили всережимные ВРШ с гидравлическим приводом и следящей системой управления.
Достоинства и недостатки ВРШ. Опыт многолетней эксплуатации ВРШ на судах различного назначения в самых разнообразных условиях показывает, что движитель является достаточно надежным механизмом, а применение его экономически вполне оправдано.
ВРШ обладают следующими преимуществами по сравнению с ВФШ:
обеспечение реверса судна без изменения направления вращения винта, что позволяет обойтись без турбины заднего хода на судах с паровыми и газовыми турбинами;
получение при неизменном числе оборотов (в том числе и при максимальном) любого значения скорости - от нулевой до наибольшей - за счет изменения шага лопастей путем их поворота;
возможность установки при длительном ходовом режиме наивыгоднейшего сочетания шага винта и оборотов главного двигателя;
сокращение на 30 - 40% времени реверса судна, причем сам реверс значительно упрощается;
существенное увеличение моторесурса главных дизелей благодаря резкому уменьшению числа их пусков и остановок при швартовке или плавании в сложных условиях;
возможность дистанционного поворота лопастей винта с мостика без подачи команд в машинное отделение;
облегчение швартовных и буксировочных операций, постановки и выборки сетей, траления благодаря большому диапазону изменения ходов;
уменьшение времени торможения и длины тормозного пути за счет ускоренного реверса;
уменьшение нагрузки на якорную цепь при съемке с якоря благодаря широкому выбору необходимого хода;
использование на электроходах с ВРШ в качестве гребных электромоторов наиболее простых синхронных электродвигателей переменного тока;
снижение на двух-трех винтовых судах сопротивления неработающего винта разворотом его лопастей;
практически постоянное соответствие винта двигателю, чего нельзя достичь при наличии ВФШ из-за возможного износа двигателя, обрастания корпуса и т. д.; в случае с ВРШ несоответствие всегда может быть устранено небольшим изменением шага;
получение на швартовных испытаниях полной мощности при полных оборотах двигателя путем уменьшения шага винта.
Наряду с перечисленными достоинствами ВРШ не свободны и от недостатков, так:
ВРШ по сравнению с ВФШ имеют более сложную конструкцию, а следовательно, и меньшую надежность;
диаметр ступицы ВРШ примерно в 1,5 раза больше, чем ВФШ, длина ступицы также несколько больше, что усложняет задачу создания обтекаемого комплекса «дейдвуд - ступица - руль»;
масса ВРШ в 2-2,5 раза больше массы ВФШ с теми же геометрическими элементами лопастей; это требует усиления подшипника кронштейна или дейдвуда;
коэффициент полезного действия (к. п. д.) ВРШ, как правило, несколько ниже к. п. д. ВФШ (на 1 - 3%);
главный двигатель в установке с ВРШ должен иметь регулятор числа оборотов: при проходе лопастей через положение «Стоп» винт снимает с двигателя очень малую нагрузку, поэтому при отсутствии регулятора в указанном положении двигатель начнет работать «вразнос».
ВФШ и ВРШ в неподвижных насадках. Направляющая насадка на гребной винт впервые была предложена в 1887 г. русским ученым Ф. А. Бриксом. Цель ее применения - повышение скорости, улучшение тяговых характеристик и маневренных качеств судов.
Направляющие насадки на гребные винты являются эффективным средством повышения пропульсивных качеств судов с тяжело нагруженными движителями. Направляющими насадками оборудуются буксирные суда и промысловые траулеры. Значительное распространение направляющие насадки различной конструкции получили также на транспортных судах и крупнотоннажных танкерах. В отдельных случаях направляющие насадки на гребные винты устанавливают для защиты лопастей от повреждений при плавании на мелководье, во льдах и других специфических условиях.
По конструктивным особенностям и назначению направляющие насадки разделяют на обычные осесимметричные и несимметричные. Обычная осесимметричная насадка образуется вращением крылового профиля заданной формы вокруг оси гребного винта. Несимметричная насадка характерна тем, что профили каждого ее меридионального сечения имеют различную форму, размеры и угол с осью гребного винта.
Неподвижная направляющая насадка жестко связана с корпусом судна и плавно сопрягается с ним.
Воздействие направляющей насадки на скорость потока в диске гребного винта является определяющим фактором в ее влиянии на КПД этого движительного комплекса. Значение и направление дополнительной скорости, вызываемой насадкой в диске гребного винта, зависят от ее геометрической формы. Для достижения наибольшего КПД комплекса и упора насадки необходимо при ее конструировании стремится к максимальному увеличению скорости протекания через диск гребного винта. Сложная картина формирования и отрыва трехмерного пограничного слоя на поверхности насадки не позволяет в настоящее время теоретически решить задачу выбора оптимальной геометрической формы ее профиля.
Направляющая насадка, увеличивая скорость протекания воды через гребной винт, разгружает сечение винта, и это должно приводить к отдалению начала его кавитации. Однако увеличение скорости протекания связано также с понижением давления вблизи гребного винта, что приближает начало его кавитации. Исследования показывают, что второе обстоятельство превалирует над первым и гребной винт комплекса, спроектированного на ту же мощность, что и открытый винт, при одинаковой площади лопастей начинает кавитировать раньше. Только на швартовном и близких к нему режимах наблюдается обратная картина, и значение необходимого для обеспечения одинакового запаса против возникновения кавита-
ции дискового отношения гребного винта в насадке примерно на 5% меньше, чем для открытого винта. При этом развиваемый комплексом упор на 20-25% больше, чем у открытого гребного винта.
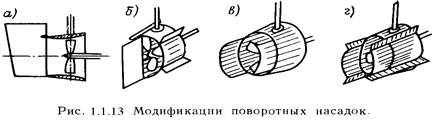
ВФШ и ВРШ в поворотных насадках. Пропульсивные свойства гребного винта в поворотной направляющей насадке аналогичны пропульсивным свойствам гребного винта в неподвижной насадке. Однако поворотная направляющая насадка обеспечивает также управление судном как рулем. Поворотные направляющие насадки будут более подробно рассмотрены ниже в разделе главных рулевых устройств. Здесь же следует еще указать на то, что поворотные направляющие насадки обычно бывают со стабилизатором для уменьшения момента на баллере и улучшения управляемости (рис. 1.10). По способу крепления к корпусу различают подвесные и двух опорные поворотные насадки. Кроме кольцевых насадок су-
 |
щеcтвуют и другие модификации (рис. 1.11).
| |||
|
Водометные движители. Водометный движитель (рис.1.12) включает следующие основные части:
 |

водозаборное устройство, предназначенное для приема воды из свободного потока и подачи к рабочему колесу;
рабочее колесо, которое передает энергию двигателя потоку, протекающему через движитель;
сопло, формирующее струю, реактивная сила которой создает тягу движителя;
реверсивно-рулевое устройство, обеспечивающее изменение направления действия тяги движителя без реверса приводного двигателя.
Коэффициент полезного действия водометного движителя и кавитационные качества рабочего колеса в значительной степени обусловлены гидродинамическим и внешним сопротивлением водозаборника, степенью равномерности потока, подводимого водозаборником к рабочему колесу.
Гидравлическое и внешнее сопротивление водозаборника, а также структура потока перед рабочим колесом зависят от конфигурации водоприемного патрубка и трубопровода, их геометрических размеров, относительной скорости протекания воды через водозаборный трубопровод, чистоты обработки поверхностей и т. п.
В качестве рабочих колес водометных движителей обычно применяют осевые и центробежные насосы. Путем комбинации нескольких насосов можно получить необходимое для водометного движителя сочетание напора и расхода.
Если не удается обеспечить требуемый напор (или расход) одной ступенью, возможно использование двух- и трехступенчатых рабочих колес (число ступеней может быть и больше). Полный напор рабочего колеса определяется как сумма напоров ступеней. Рассчитанный как сумма напоров одноступенчатых насосов напор многоступенчатого рабочего колеса в достаточно широком диапазоне поступи отличается от измеренного не более чем на 3-5 %. Это справедливо также при работе лопастей осевого насоса в условиях развитой кавитации.
На кратковременных режимах работы (например, во время выхода судна на крылья) для улучшения компоновки движителя иногда выгодно допустить кавитацию лопастей рабочего колеса, если обеспечиваются требуемые тяговые характеристики. Напорные характеристики насосов при развитой кавитации можно определить только по данным модельных испытаний. Напор рабочих колес с кавитирующими лопастями в реальных условиях меньше, чем в однородном потоке. Снижение напора зависит от характера неоднородности потока, конструкции рабочего колеса, режима работы и должно быть в каждом конкретном случае определено в результате испытания моделей. Модельные испытания показывают, что уменьшение напора вследствие неоднородности потока может достигать 25 %; момент на валу рабочего колеса снижается в меньшей степени. Эффективность рабочего колеса в этих случаях уменьшается на 10 – 20 %.
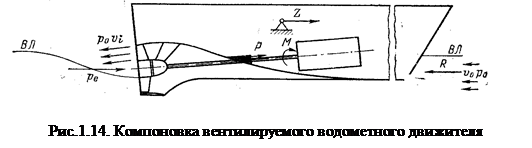
Проблема стабильной работы движителей вблизи свободной поверхности воды, когда попадание атмосферного воздуха в гидравлическое сечение движителя, особенно при волнении, неизбежно, радикально решается использованием в движителях вентилируемых лопастных систем. При работе подобных движителей на лопастях образуются воздушные каверны, полости которых соединены с атмосферой. Тяга вентилируемых водометных движителей (ВВД) создается на основном режиме работы только за счет повышения давления на нагнетающей стороне лопасти. Поэтому такие движители практически не изменяют гидравлические характеристики во время работы в потоке, насыщенном воздушными пузырями, и в случае частичного оголения гидравлического сечения. ВВД состоит из водозаборника, приводного вала с кронштейном и рабочего колеса, размещенного на выходном участке водозаборника. Для полной вентиляции лопастей, которая происходит при смыкании воздушной каверны на лопастях с атмосферным воздухом, компоновка движителя на корпусе судна должна предусматривать контакт струи с атмосферным воздухом, т. е. надводный или полузатопленный выброс струи. Пример компоновки ВВД с корпусом быстроходного судна показан на рис. 1.14.
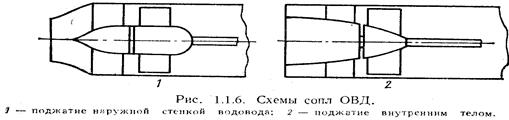
Сопло водометного движителя формирует струю, необходимую для обеспечения тяги. Площадь на срезе сопла меньше, чем на входе в него, поскольку рабочее колесо создает избыточную потенциальную энергию - повышенное давление, которое необходимо преобразо-
вать в кинетическую энергию струи, т. е. получить приращение скорости. Поджать сечение сопла можно в результате сужения наружного трубопровода, как это показано на рис.1.15.,
либо расширением центрального тела, которое является продолжением ступицы спрямляющего аппарата. В этом случае струя, истекая из кольцевого отверстия, будет иметь форму полого цилиндра. Второй вид оформления сопла рационален при большом диаметре ступицы последней ступени рабочего колеса, так как позволяет значительно сократить длину сопла.
Водометные движители снабжаются реверсивными устройствами. Эти устройства отклоняют струю, истекающую из сопла движителя на ~180° что приводит к изменению на-
 |
 |
|
правления действия силы реакции струи, а значит и направления тяги движителя. Путем отклонения струи движителя с помощью рулевого устройства можно получить боковую силу для управления судном. Обычно реверсивное и рулевое устройства совмещают в единую конструкцию, которая получила названий реверсивно-рулевого устройства (РРУ).
Эффективность реверсивного устройства оценивается тягой заднего хода на швартовых, которая измеряется в долях от тяги переднего хода при одинаковой мощности приводного двигателя или одинаковой частоте вращения рабочих колес. Тяга заднего хода у лучших образцов РРУ достигает 60-65%от тяги переднего хода; в среднем она составляет 45-55 %.
Водометные движители при умеренных скоростях судна уступают по КПД гребным винтам и применяются, когда необходимы малая осадка и лучшая защищенность рабочего органа. При больших скоростях судна эффективность водометных движителей близка к эффективности гребных винтов и вследствие конструктивных преимуществ они широко применяются на судах на воздушной подушке и подводных крыльях.
Гребные колеса.Гребное колесо представляет собой вращающуюся цилиндрическую конструкцию с осью, расположенной поперек судна, и укрепленной на ней по окружности прямоугольными лопастями – плицами. Относительно ватерлинии гребное колесо размещается так, что находящиеся в нижнем положении плицы погружены в воду. Упор гребного колеса создают силы, возникающие на погруженных в воду плицах. Для уменьшения потерь энергии из-за образования брызг при входе и выходе плиц из воды они шарнирно соединяются с эксцентриковым механизмом, регулирующим положение плиц при повороте колеса. Гребные колеса применялись на судах с начала XIX века. Первым колесным судном, совершавшим регулярные рейсы, был п/х “Клермонт” (США). В начале XX века на смену гребным колесам пришли более эффективные движители – гребные винты.
Главные рулевые устройства.Рулевые устройства (РУ) отличаются тем, что их действие проявляется только при наличии скорости судна. Рулевые устройства поэтому эффективны только при работе главных движителей (или в течение короткого времени после остановки последних) и непригодны для обеспечения управляемости судна на предельно малых скоростях хода и без хода.
Под термином «ход» понимается процесс перемещения судна в направлении ДП под действием приложенной к судну тяги. Термин «без хода» не означает, что судно неподвижно, а свидетельствует лишь об отсутствии продольной тяги, либо об отсутствии продольной проекции скорости движения судна. В последнем случае судно может двигаться лагом или вращаться относительно точки, расположенной на ДП. Под термином «предельно малая скорость хода» следует понимать скорость около 1 м/с и менее.
В качестве рабочих органов РУ применяются рули, рули повышенной эффективности, много перьевые рулевые комплексы, поворотные насадки на гребные винты, сопла водометных движителей.
Рули. Руль представляет собой крыло, которое поворачивается вокруг вертикальной оси и располагается в потоке воды за корпусом судна. Для увеличения скорости обтекания руля его часто размещают полностью или частично в струе, отбрасываемой гребным винтом.
Действие руля основано на том, что гидродинамическая сила, возникающая на пере руля при наличии угла атаки, через связи руля с корпусом передается на корпус судна.
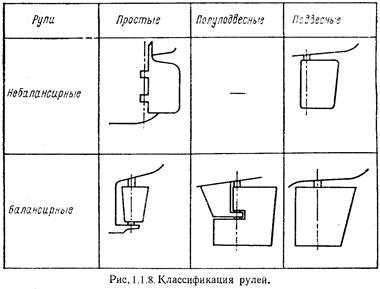
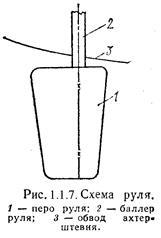 Сила, возникающая на руле, пропорциональна квадрату скорости обтекания руля или приближенно квадрату скорости движения судна. Поскольку гидродинамические силы и моменты, возникающие на корпусе судна, также пропорциональны квадрату скорости движения, эффективность работы руля на малых скоростях практически от скорости хода не зависит (при безветрии). Если скорость хода велика, эффективность руля может уменьшаться в результате кавитации руля или в результате проникновения к рулю атмосферного воздуха (аэрации). Для защиты от аэрации руль следует размещать за кормой судна таким образом, чтобы при перекладке его профиль не выходил за горизонтальную проекцию действующей ватерлинии и по возможности был удален от нее, в особенности от транца кормы. Руль состоит из пера руля и баллера руля (рис. 1.16). Перо руля представляет собой тело, непосредственно воспринимающее гидродинамическое давление. Часто под термином «руль» понимают только перо руля. Баллер руля служит для поворота пера руля относительно вертикальной оси и для крепления пера руля к корпусу судна. Судовые рули могут быть классифицированы следующим образом:
Сила, возникающая на руле, пропорциональна квадрату скорости обтекания руля или приближенно квадрату скорости движения судна. Поскольку гидродинамические силы и моменты, возникающие на корпусе судна, также пропорциональны квадрату скорости движения, эффективность работы руля на малых скоростях практически от скорости хода не зависит (при безветрии). Если скорость хода велика, эффективность руля может уменьшаться в результате кавитации руля или в результате проникновения к рулю атмосферного воздуха (аэрации). Для защиты от аэрации руль следует размещать за кормой судна таким образом, чтобы при перекладке его профиль не выходил за горизонтальную проекцию действующей ватерлинии и по возможности был удален от нее, в особенности от транца кормы. Руль состоит из пера руля и баллера руля (рис. 1.16). Перо руля представляет собой тело, непосредственно воспринимающее гидродинамическое давление. Часто под термином «руль» понимают только перо руля. Баллер руля служит для поворота пера руля относительно вертикальной оси и для крепления пера руля к корпусу судна. Судовые рули могут быть классифицированы следующим образом:
А. По способу соединения пера руля с корпусом судна (рис. 1.17): а) простые - с несколькими опорами на ахтерштевне; б) полуподвесные - висящие на баллере и опертые на корпус или специальный кронштейн в одной точке по высоте руля; в) подвесные - полностью висящие на баллере.

|
|
|
|
|
 |
|
| |||
|
В. По форме профиля руля: а) плоские; б) обтекаемые.
В настоящее время простые плоские рули иногда применяются на несамоходных судах. Современные рули самоходных судов имеют обтекаемый профиль.
Простые рули применяются на транспортных судах, имеющих развитый кормовой дейдвуд. Полуподвесные и подвесные рули, как правило, бывают балансирными. Эти рули весьма широко используются на судах всех классов и назначений. Небалансирные подвесные или полуподвесные рули практически не применяются.
Разновидностью простых небалансирных рулей являются рули за рудерпостом, отличительная особенность которых заключается в том, что они имеют общий профиль с рудерпостом (в не переложенном положении). Таким образом, комплекс руль - рудерпост представляет собой разрезной руль, передняя часть которого (рудерпост) не перекладывается. Как правило, протяженность (хорда) рудерпоста составляет 0,10-0,25 хорды профиля всего комплекса.
На судне могут быть установлены один, два, три и больше рулей. Один руль размещается в ДП (за винтом у одновинтового судна), два руля, как правило, устанавливаются за гребными винтами двухвинтовых судов. Рули за рудерпостом применяются чаще всего на крупнотоннажных одновинтовых судах и всегда устанавливаются за гребным винтом.
Угол поворота рулей относительно ДП судна называется углом перекладки рулей. Под термином «перекладка» понимается процесс поворота руля из одного положения в другое. Максимальный угол перекладки обычных рулей составляет, как правило, 35°. Дальнейшая перекладка руля невыгодна, поскольку она приводит лишь к небольшому увеличению силы, действующей на руль, но одновременно ведет к резкому увеличению момента на баллере, что диктует необходимость утяжеления привода рулей и роста мощности рулевой машины.
Суммарная площадь рулей, необходимая для обеспечения управляемости, зависит от размеров и назначения судна, формы кормы, максимальной скорости хода и расположения руля относительно винта.
Площадь руля реального судна должна выбираться с учетом как приведенных данных по коэффициенту К, так и результатов расчета управляемости либо данных модельных испытаний.
Рули повышенной эффективности. К рулям повышенной эффективности относятся рули с изменяемой геометрией профиля и роторные рули.
Рули с изменяемой геометрией профиля составляют большую группу конструктивных типов, отличительной чертой которых является наличие закрылка, предкрылка, щитков. Наибольшее распространение в этой группе получили рули за рудерпостом, представляющие собой рули с неподвижным предкрылком. Преимуществом этих рулей является удобство их размещения на ахтерштевне и высокая степень защищенности, чем и определяется их распространенность, так как поперечная сила рулей за рудерпостом меньше поперечной силы обычных рулей той же суммарной площади.
В группе рулей с закрылками выделяются рули Беккера, обладающие высокой эффективностью при относительно небольшом гидродинамическом моменте на баллере. Смысл конструкции рулей Беккера заключается в механизме совместного привода руля и его закрылка. Схема механизма привода руля Беккера приведена на рис. 1.18.
Перекладка основного руля 4 производится с помощью обычного баллера вокруг оси 3. Закрылок 1 поворачивается при этом вокруг оси 2. Положение закрылка относительно основного руля определяется направляющей 5, которая, будучи жестко связанной с закрылком, скользит своим пазом по штырю 6, закрепленному на корпусе судна.
 |
Роторный руль представляет собой поворотное перо, перед которым расположен цилиндр, способный вращаться вокруг собственной оси, соосной с осью поворота основного
|
пера. Лобовая часть этого цилиндра и основное перо образуют общий крыловой профиль (рис. 1.19).
 Вращение цилиндра может осуществляться различными способами: с помощью гидравлических двигателей, механических и гибких передач, электродвигателей, расположенных в самом теле руля или корпусе судна.
Вращение цилиндра может осуществляться различными способами: с помощью гидравлических двигателей, механических и гибких передач, электродвигателей, расположенных в самом теле руля или корпусе судна.
Направление вращения цилиндра зависит от знака угла перекладки пера руля, за исключением зоны углов ±10°, внутри которой цилиндр остается неподвижным.
|
На ходовых режимах, при которых не требуются большие перекладки руля, эффект вращения цилиндра практически отсутствует. Цилиндр останавливают, и роторный руль работает как обычный.
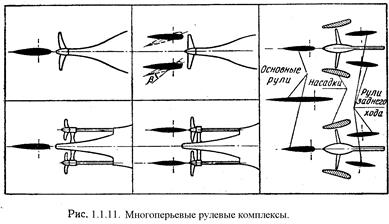 |
Многоперьевые рулевые комплексы (рис.1.20) нашли широкое применение на современных крупнотоннажных и судах внутреннего плавания. Число существующих модификаций многоперьевых систем рулей достаточно велико. Общим принципом построения всех таких систем является образование при больших углах перекладки рулей направляющих «каналов», обеспечивающих эффективный поворот струи движителя и значительную поперечную силу ДРК, сопоставимую с поперечной силой поворотных насадок.
|
Парные рули обычно поворачиваются синхронно на одинаковый угол, но больший поворачивающий эффект можно получить, если один из рулей в своем повороте отстает от другого на некоторый угол порядка 25°. Парные рули с отдельным приводом на каждом руле позволяют в широких пределах изменять направление струи от винта и даже давать судну задний ход.
Еще более эффективным средством улучшения поворотливости судна является применение строенных рулей или трехбаллерного рулевого устройства с рулями большого удлине-
ния. Их эффективность резко возрастает, если эти рули перекладываются на углы, превышающие в два и более раза предельный угол перекладки обычных рулей, практически перекрывают поток гребного винта и направляют его под углом к ДП, близким к 90°, создавая значительные боковую силу и поворачивающий судно момент.
 |
Поворотные и синхронные поворотные направляющие насадки.Поворотная направляющая насадка на гребной винт представляет собой обычно кольцевое крыло, закрепленное на баллере и окружающее гребной винт. Кроме баллера, насадка может быть также шарнирно соединена со специальным кронштейном на корпусе судна. Насадка, прикрепленная только к баллеру, именуется подвесной. Если она опирается на кронштейн - полуподвесной (рис. 1.21). Основное назначение любой (в том числе и поворотной) насадки заключается в повышении КПД движительного комплекса.
|
Важной характеристикой поворотной насадки является расположение оси баллера по длине насадки. Для осуществления поворота насадки необходимо, чтобы плоскость, в которой располагаются вершины лопастей гребного винта, совпадала с поперечной плоскостью, проходящей через ось баллера. Поскольку гребной винт всегда располагается в сечении с наименьшим внутренним диаметром, от положения оси баллера по длине насадки зависит форма профиля насадки.
Положение оси баллера по длине насадки в сильной степени влияет на гидродинамический момент на баллере насадки, который должен быть преодолен при ее перекладке. При переднем ходе момент на баллере оказывается минимальным в случае расположения оси баллера на 25-30 % длины насадки от носовой кромки. С ростом отстояния оси баллера от носовой кромки момент на баллере резко возрастает. На заднем ходу момент на баллере при указанном смещении оси баллера уменьшается.
Если на двухвинтовом судне устанавливают раздельные поворотные насадки, ось баллера целесообразно размещать посредине длины насадки. При этом с целью уменьшения гидродинамического момента на баллере в хвостовой части насадки должен быть укреплен стабилизатор, чаще всего неподвижный относительно насадки.
Угол поворота насадки относительно ДП судна составляет, как правило, 30- 35°. В непереложенном положении ось поворотной насадки чаще всего совпадает с осью гребного винта.
На судне могут быть установлены одна или две поворотные насадки. Если на одновинтовом судне имеется одна насадка, то она в соответствии с приведенной классификацией всегда относится к группе рулевых устройств. Если же на двухвинтовом судне поворотных насадок две, то к группе рулевых устройств они будут относиться лишь в том случае, если конструкция привода обеспечивает синхронную (т. е. в одном направлении и на одинаковый угол) перекладку насадок. В том случае, когда привод допускает раздельную перекладку (т. е. каждая насадка может быть переложена на любой угол в любом направлении независимо от другой насадки), насадки называются раздельными, и тогда они относятся к группе главных движительно-рулевых устройств. Однако, даже и в последнем случае эти насадки при движении судна, на скоростях свыше 3-4 уз перекладываются совместно (либо перекладывается только одна насадка).
 |
Известны многочисленные модификации поворотных насадок, преследующие цели увеличения поперечной силы насадки, в особенности при неработающем гребном винте, улучшения ее стабилизирующего действия, уменьшения момента на баллере. Наиболее характерные модификации: установка в диаметральной плоскости насадки стабилизатора большого размера, выступающего далеко вверх за пределы струи движителя (рис. 1.22, а); установка на насадке продольных ребер (рис. 1.22, б) с целью улучшения стабилизирующего действия ДРК и повышения управляемости судна при ходе судна по инерции; установка бо-
|
ковых цилиндрических стабилизаторов (рис. 1.22, в), представляющих собой частичное продолжение насадки с целью увеличения ее поперечной силы.
Одним из наиболее результативных путей повышения эффективности поворотной насадки как средства управления судном является установка на ней поворотного стабилизатора.
Неподвижную часть стабилизатора (рудерпост) устанавливают внутри насадки. Поворотную часть стабилизатора навешивают на рудерпост.
Привод поворотной части стабилизатора осуществляют по схеме, аналогичной схеме привода рулей Беккера, для чего на корпусе судна устанавливают штырь, входящий в паз на-
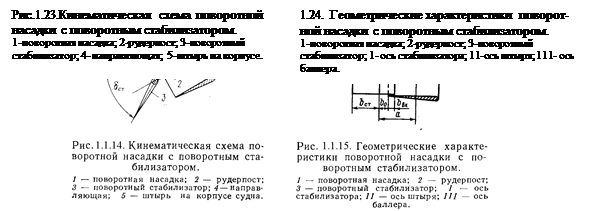 |
правляющей стабилизатора. Положение штыря относительно баллера выбирают таким образом, чтобы при перекладке насадки на максимальный угол 30° угол перекладки стабилизатора составлял 60°. Кинематическая схема поворотной насадки с поворотным стабилизатором изображена на рис. 1.23, а ее геометрические характеристики показаны на рис. 1.24.
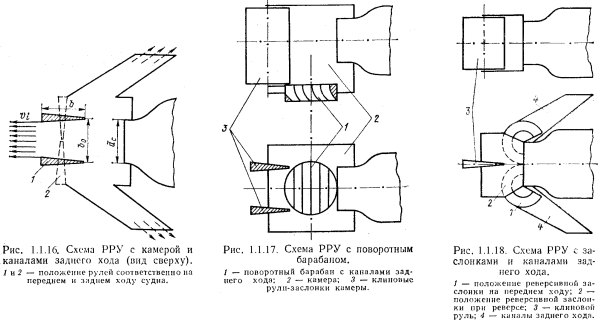
Сопла водометных движителей.Реверсивно-рулевое устройство (РРУ) водометных движителей можно условно подразделить на две группы. К первой относятся РРУ, состоящие из камеры за соплом водометного движителя и каналов заднего хода (рис. 1.25). При реверсировании задняя стенка камеры перекрывается рулями или специальными заслонками; вода, истекая через каналы заднего хода создает тягу обратного направления. Каналы заднего хода могут быть изготовлены поворотными, что позволяет обеспечить повышенную управляемость судна на заднем ходу. Разновидность подобной конструкции РРУ с поворотным барабаном-соплом приведена на схеме рис. 1.26. При реверсировании РРУ с камерами изменяется режим работы водометного двигателя; скорость протекания воды через движитель снижается, нагрузка двигателя увеличивается.
У второй группы РРУ реверсирование струи движителя осуществляется в пределах специальных профилированных заслонок, которые иногда примыкают к каналам заднего хода. Схема РРУ с заслонками показана на рис. 1.27. РРУ этой группы оказывают меньшее влияние на режим работы движителя в процессе реверсирования.
В качестве рулевого элемента устройства используют один или два клиновых руля, установленные за соплом движителя, реже применяют коробчатые и кольцевые рули, а также поворотные сопла водометных движителей.
На РРУ водометных движителей с надводным выбросом струи не рекомендуется применять рули обтекаемой формы, поскольку на таких рулях в диапазоне углов перекладки до ~ 15° практически нет боковой силы, необходимой для управления судном. Физически это объясняется тем, что на выпуклой нагнетающей стороне руля осредненное давление не становится больше атмосферного при перекладке его на ~ 15°, а на засасывающей стороне давление не снижается вследствие прорыва на ее поверхность атмосферного воздуха. На РРУ обычно применяют рули клиновидной формы; для улучшения прочностных характеристик руля форма его сечения может быть принята в виде параболического клина.
Дата добавления: 2015-11-18; просмотров: 9369;