Главные движительно-рулевые устройства. 1 страница
|
|
|
на нем может отсутствовать. Аналогично РУ действие ГДРУ сопряжено с работой главных двигателей.
К ГДРУ относятся парусные движители, фланкирующие рули, гребные винты, работающие в противоположные стороны, П-образные поворотные насадки, раздельные поворотные насадки, неподвижные несоосные насадки, поворотные винтовые колонки и крыльчатые движители.
Парусные движители.Парусные движители предназначены для преобразования энергии ветра в работу полезной тяги судна, а также для придания судну нужного направления движения. Парус представляет собой полотнище из льняной, хлопчатобумажной или синтетической ткани, укрепленное на деталях рангоута, которое ставится поперек судна (прямой парус) или вдоль него (косой парус). К парусам также относятся аэродинамически эквивалентные им жесткие оболочки (парус-крыло). Совокупность парусов, рангоута, такелажа, палубных механизмов и дельных вещей, предназначенных для постановки, уборки и управления парусами называется парусным вооружением.
Паруса и парусное вооружение появилось 5-6 тысяч лет назад в Египте и Месопотамии, несколько позже и независимо – в Китае, Восточной Азии, Океании и Южной Америке. В настоящее время существует довольно большое разнообразие в парусном вооружении, и парусные суда различают по числу мачт (от 1 до 7) и типу парусного вооружения.
До середины XIX века парусные суда были основным средством транспорта на море. В настоящее время парусные суда используются в качестве спортивных, прогулочных и учебных судов.
Несмотря на сложность парусного вооружения и управления им, а также зависимость управляемости парусного судна от направления и силы ветра, рост цен на топливо и ужесточение требований к охране окружающей среды привели к разработке проектов и постройке ряда новых коммерческих парусно-моторных судов.
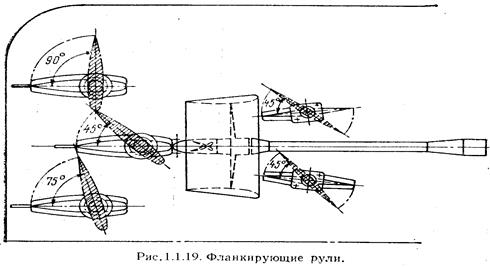 |
Фланкирующие рули. Фланкирующие рули (рис. 1.28) отличаются от многоперьевых рулевых комплексов наличием рулей не только за, но и перед винтами, что улучшает управ-
ляемость судна при работе винтов на задний ход. Причем совместная перекладка всех рулей, размещенных перед винтами, происходит независимо от совместной перекладки рулей за винтами. Работа винтов «враздрай» при соответствующей перекладке рулей обеспечивает получение боковой силы желаемого направления. Фланкирующие рули применяются на реч-
ных и озерных буксирах-толкачах. Часто под термином «фланкирующие рули» понимают только рули, расположенные перед винтами.
 |
Гребные винты, работающие в противоположные стороны.На многовинтовых судах управление судном можно осуществлять работой одних лишь винтов в разные стороны (“враздрай”). Разворачивающий момент у многовинтового судна появляется за счет смещения гребных винтов от диаметральной плоскости. Благодаря наличию момента от винтов многовинтовые суда при использовании винтов “враздрай” и руля обладают повышенной управляемостью.
|
 Трехвинтовые суда практически объединяют в себе маневренные свойства одно- и двухвинтовых судов. Благодаря наличию трех винтов судно может в широких пределах менять циркуляцию и даже разворачиваться на месте. Быстрый разворот трехвинтового судна получается, если средняя машина будет работать вперед, а бортовые машины - «враздрай» при руле, положенном на соответствующий повороту, борт.
Трехвинтовые суда практически объединяют в себе маневренные свойства одно- и двухвинтовых судов. Благодаря наличию трех винтов судно может в широких пределах менять циркуляцию и даже разворачиваться на месте. Быстрый разворот трехвинтового судна получается, если средняя машина будет работать вперед, а бортовые машины - «враздрай» при руле, положенном на соответствующий повороту, борт.
При движении кормой, поскольку на заднем ходу судно плохо слушается руля, рекомендуется два режима работы:
1) работать средней машиной на задний ход, а управлять судном при помощи бортовых машин;
|
при отклонении судна от заданного курса следует переложить руль в сторону уклонения кормы и дать ход вперед средней машиной.
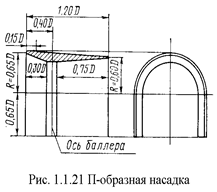 П-образные поворотные насадки.Одним из новых вариантов ГДРУ, получающих в последние годы широкое распространение, является гребной винт в П-образной или Г-образной поворотных насадках, предложенных Г.И. Беззубовым. (рис. 1.30). Высокая технологичность изготовления, простота ремонта, возможность агрегатной замены, меньшая забиваемость битым льдом и другие эксплуатационные преимущества обусловили внедрение этого типа ДРК взамен обычных поворотных насадок.
П-образные поворотные насадки.Одним из новых вариантов ГДРУ, получающих в последние годы широкое распространение, является гребной винт в П-образной или Г-образной поворотных насадках, предложенных Г.И. Беззубовым. (рис. 1.30). Высокая технологичность изготовления, простота ремонта, возможность агрегатной замены, меньшая забиваемость битым льдом и другие эксплуатационные преимущества обусловили внедрение этого типа ДРК взамен обычных поворотных насадок.
Гребной винт в П-образной поворотной насадке отличается от гребного винта в обычной поворотной насадке как по своим пропульсивным качествам, так и по особенностям работы в качестве средства управления.
|

не переложенной насадке поперечную силу, направление которой зависит от направления вращения гребного винта. На переднем ходу у гребных винтов правого вращения эта сила направлена вправо, у гребных винтов левого вращения - влево (при взгляде с кормы).
Образование поперечной силы на гребном винте вызывает реактивное отклонение его струи. Не переложенная насадка оказывается в зоне неравномерного косого обтекания, и на
ней возникает поперечная сила, направленная в сторону, противоположную поперечной силе гребного винта.
Степень взаимной компенсации поперечных сил, развивающихся на гребном винте и насадке в этих условиях, зависит от конфигурации комплекса, т. е. от геометрических характеристик насадки и положения в ней гребного винта.
Испытания модели ДРК этого типа показали, что гидродинамические характеристики П-образной насадки в качестве средства управления линейны в широком диапазоне углов перекладки и дрейфа и несколько хуже, чем у обычной кольцевой.
Раздельные поворотные насадки.Раздельные поворотные насадки (РПН) на двухвинтовых судах при работе винтов «враздрай» развивают значительную боковую силу при отсутствии хода, т. е. обладают качествами, присущими САУ. При этом направление равнодействующей тяг комплексов и ее положение по длине судна зависят от того, как переложены насадки.
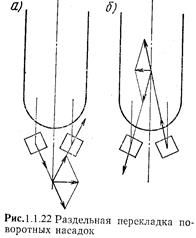 При перекладке обеих насадок внутрь (рис. 1.31, а) равнодействующая приложена в точке диаметральной плоскости за кормой судна, и последнее разворачивается на месте тем интенсивнее, чем больше углы перекладки насадок.
При перекладке обеих насадок внутрь (рис. 1.31, а) равнодействующая приложена в точке диаметральной плоскости за кормой судна, и последнее разворачивается на месте тем интенсивнее, чем больше углы перекладки насадок.
Когда обе насадки переложены наружу (рис. 1.31, б), равнодействующая перемещается в нос и в корму соответственно, судно не только дрейфует, но и поворачивается в сторону, зависящую от величины и направления упоров винтов. При некотором среднем угле перекладки точка приложения равнодействующей может совпасть с центром сопротивления воды при боковом движении судна. В этом случае оно дрейфует без вращения, т. е. движется лагом.
|

РПН установлены на многих судах, главным образом речного флота - буксирах-толкачах, сухогрузных и наливных судах. Испытания показывают высокую эффективность РПН, обеспечивающих судам повышенную маневренность.
Неподвижные несоосные насадки.Неподвижные несоосные насадки представляют собой средство управления, предложенное Г. Я. Першицем. В отличие от обычных неподвижных насадок, соосных с гребным винтом, эти насадки повернуты вокруг вертикальных осей задними кромками к ДП судна с таким расчетом, чтобы продолжения осей насадок пересекались на ДП за кормой судна (рис. 1.32). Угол отворота насадок от осей гребных валов
|

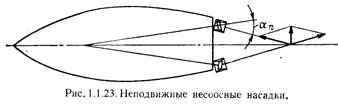 составляет около 4-8°. Поскольку при малых углах отворота насадки от линии вала, тяга комплекса винт - насадка практически совпадает с осью насадки. Равнодействующая тяг обоих комплексов приближенно располагается в точке пересечения осей насадок, а изменением частоты вращения винтов, в том числе винтов, работающих враздрай, направление равнодействующей может быть изменено на любой угол.
составляет около 4-8°. Поскольку при малых углах отворота насадки от линии вала, тяга комплекса винт - насадка практически совпадает с осью насадки. Равнодействующая тяг обоих комплексов приближенно располагается в точке пересечения осей насадок, а изменением частоты вращения винтов, в том числе винтов, работающих враздрай, направление равнодействующей может быть изменено на любой угол.
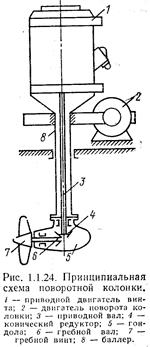
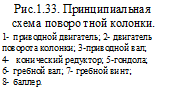
Поворотные винтовые колонки.Поворотная винтовая колонка (ПВК) представляет собой гребной винт (или комплекс винт-насадка), направление тяги которого может меняться в широких пределах вследствие поворота устройства относительно оси, перпендикулярной к оси гребного винта (рис.1.33).
Если ось гребного вита колонки параллельна ДП судна, ПВК является главным движительным устройством. Действие ПВК как ГДРУ проявляется при повороте ее на некоторый угол относительно вертикальной оси. Как правило, угол поворота ПВК составляет 360°, что позволяет менять направление тяги ПВК, не прибегая к реверсированию приводного двига-
|
Если на судне установлены две ПВК, каждая из которых может поворачиваться независимо от другой, эффективность их действия повышается. Принципиально схема действия на судно сил от ПВК не отличается от соответствующей схемы, относящейся к раздельным поворотным насадкам, однако углы отклонения векторов тяг в случае ПВК не ограничены, а поэтому и эффективность двух ПВК, используемых как ГДРУ, оказывается много большей эффективности РПН (при равной мощности устройств),
 В 70-х годах некоторые зарубежные фирмы начали выпускать устройства, состоящие из двух ПВК, объединенных с автоматизированной системой управления ими. Такие устройства кардинально упрощают управление ПВК, сводя участие человека (рулевого) к постановке в определенное положение рукоятки, задающей требуемое направление перемещения или поворота судна. Автоматизированная система по сигналу от этой рукоятки поворачивает в необходимое положение обе ПВК.
В 70-х годах некоторые зарубежные фирмы начали выпускать устройства, состоящие из двух ПВК, объединенных с автоматизированной системой управления ими. Такие устройства кардинально упрощают управление ПВК, сводя участие человека (рулевого) к постановке в определенное положение рукоятки, задающей требуемое направление перемещения или поворота судна. Автоматизированная система по сигналу от этой рукоятки поворачивает в необходимое положение обе ПВК.
Крыльчатые движители.Впервые крыльчатый движитель, получивший практическое применение, был предложен в 1926 г. австрийским инженером Шнейдером. Крыльчатый движитель (рис. 1.34.) - это устройство, использующееся не только для создания упора, но и для изменения его направления. Помимо этого, крыльчатый движитель позволяет регулировать его гидродинамические характеристики, т. е. сочетает в себе свойства движителя регулируемого шага и средства управления.
|

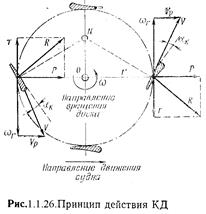 Конструктивно крыльчатый движитель представляет собой диск (ротор) с вертикальной осью вращения, установленный заподлицо с днищевой обшивкой (либо с платформой, если движитель расположен в поперечном канале). Диск несет на себе четыре-восемь поворотных вертикальных лопастей, размещенных на равном расстоянии друг от друга по окружности диска и представляющих собой профилированные крылья. При вращении движителя каждая лопасть совершает вращательное движение по отношению к диску и вместе с диском относительно воды. В воде находятся только лопасти, а механизмы вращения диска и поворота лопастей размещены внутри корпуса судна.
Конструктивно крыльчатый движитель представляет собой диск (ротор) с вертикальной осью вращения, установленный заподлицо с днищевой обшивкой (либо с платформой, если движитель расположен в поперечном канале). Диск несет на себе четыре-восемь поворотных вертикальных лопастей, размещенных на равном расстоянии друг от друга по окружности диска и представляющих собой профилированные крылья. При вращении движителя каждая лопасть совершает вращательное движение по отношению к диску и вместе с диском относительно воды. В воде находятся только лопасти, а механизмы вращения диска и поворота лопастей размещены внутри корпуса судна.
|

Перемещение точки N вдоль диаметра движителя изменяет величину упора, зависящую от длины отрезка ON. Направление упора перпендикулярно этому отрезку.
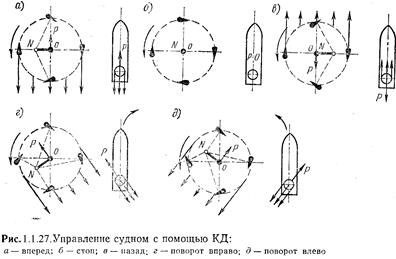
Регулируя величину упора, можно осуществить все режимы движения судна от «полного хода вперед» через «Стоп» до «Полного хода назад». Положение «Стоп» соответствует совмещению точки N с центром диска О. В этот момент упор лопастей равен нулю.
Перемещением точки N в стороны от диаметра меняется не только величина, но и направление упора, т. е. производится поворот судна. Скорость и направление вращения диска движителя при этом могут оставаться постоянными.
Управление судном при помощи КД показано на рис.1.36. Суда, оборудованные крыль- чатыми движителями, имеют ряд преимуществ перед винтовыми:
сочетание функций винта и руля, вследствие чего отпадает необходимость в рулевом устройстве;
возможность направления силы тяги в любую сторону;
некоторое повышение к. п. д. установки в сравнении с ВФШ;
возможность расположения буксировщика при буксировке лагом как в носовой, так и в кормовой оконечности судна, так как упор буксировщика на переднем и заднем ходу одинаков;
 осуществление перемены хода без реверса двигателя;
осуществление перемены хода без реверса двигателя;
возможность создания упора в направлении, перпендикулярном борту швартующегося судна при любом положении буксировщика.
Хорошие маневренные качес-тва судов с КД позволяют особо выгодно использовать эти движители на буксировщиках.
|

|

Путь торможения судна с КД обычно не превышает длины корпуса, так как выступающие лопасти движителя быстро гасят инерцию;
существенно сокращается и время торможения. Буксировщик с КД затрачивает на прием буксира на ходу на 30 - 40% времени меньше, чем винтовой буксир, а при сильном ветре и течении время сокращается в 3-4 раза. При швартовке транспортных судов к причалу примерно в 5 раз сокращается время, необходимое для соответствующего маневрирования буксировщика.
Необходимо отметить и некоторые недостатки судов, оборудованных КД:
суда, имеющие КД в качестве основного движителя, для плавания в открытом море не приспособлены, так как на волнении несущий диск и лопасти будут подвергаться чрезмерным напряжениям;
для плавания во льду КД требует надежной конструктивной защиты;
сложность конструкции самих КД и относительно большая масса (10 кг на 1 л. с. и более) позволяет применять их лишь при небольших мощностях нереверсивного двигателя;
КД увеличивают фактическую осадку судна.
Вспомогательные устройства управления(ВУУ) характерны тем, что для их работы включения главных двигателей не требуется, поскольку ВСУ оборудованы собственными двигателями. Предназначены ВУУ для обеспечения управляемости судна только на предельно малых скоростях и без хода, и эффективность их, как правило, растет по мере уменьшения скорости хода. Судно, оборудованное ВУУ, должно иметь обычный руль или любое другое РУ. Иногда ВУУ устанавливаются на суда, снабженные ГДРУ.
Вспомогательные устройства управления по характеру своего воздействия на судно подразделяются на подруливающие устройства и вспомогательные движительно-рулевые устройства, изгибающие устройства и буксирные устройства.
Подруливающие устройства(ПУ) является одним из наиболее распространенных вспомогательных средств управления судном. Оно представляет собой автономную систему, независимую от главных двигателей, размещенную в корпусе судна. ПУ, кроме откидных винтовых колонок, создают поперечную силу (тягу ПУ) путем засасывания забортной воды и выбрасывания ее в поперечном по отношению к ДП судна направлении.
Подруливающее устройство предназначается для управления судном в условиях, в которых эффективность основных средств управления оказывается недостаточной. Подруливающее устройство должно обеспечивать маневрирование судна, не имеющего хода, при швартовных операциях, при отходе от стенки, при развороте в условиях ветра и течения, оно должно способствовать маневрированию судна на малых скоростях при самостоятельном движении на акваториях портов, при различных ограничениях фарватера, в узостях и т. п.
Носовые и кормовые подруливающие устройства. Общим конструктивным признаком этих ПУ является наличие поперечного канала в корпусе судна и встроенного в него импеллера или насоса.
Носовые ПУ (НПУ) и кормовые ПУ (КПУ) различают по месту расположения на судне. Для увеличения действующего на судно вращающего момента носовое ПУ размещают на возможно большем удалении от миделя.
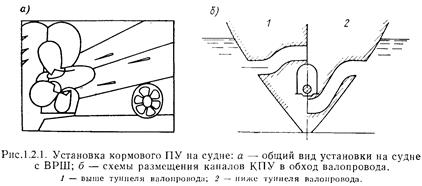
Кормовое ПУ устанавливают в дополнение к носовому для обеспечения судну движения лагом или других специальных маневров. Для увеличения вращающего момента кормовое ПУ также размещают возможно дальше от миделя. Размещение КПУ вызывает обычно значительные трудности, связанные с расположением в этом районе валопроводов гребных винтов. На судах с большой осадкой КПУ может размещаться ниже линии гребного вала (рис.1.37). На судах с малой осадкой применяют КПУ с каналами сложной формы. Мощность КПУ обычно меньше или равна мощности НПУ.
 |
По числу каналов ПУ разделяются на одно- и двухканальные. Наиболее распростране-
|
ричную, относительно ДП судна, конструкцию (рис. 1.38).
|
|
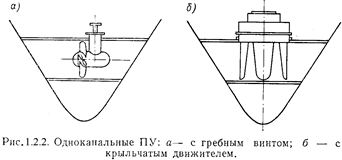 |
Двухканальные ПУ могут представлять собой комбинацию двух ПУ одностороннего действия (рис. 1.39). Подобная конструкция позволяет несколько повысить эффективность ПУ благодаря более рациональной, несимметричной относительно ДП, профилировке канала и использованию более экономичного импеллера одностороннего действия (например, ВФШ с авиационным профилем сечения лопастей). Однако реализовать эффект от расширения выходной части канала и соответствующего снижения скорости в струе ПУ, как правило, не
удается. При обычной длине канала, не превышающей четырех его диаметров, эффективное расширение выходной части канала возможно только при большом угле раствора диффузора, приводящем к не компенсируемым вязкостным потерям. Кроме того, расширение канала приводит к росту разрежения на засасывающей стороне импеллера, увеличивая тем самым опасность кавитации. Стоимость таких ПУ выше стоимости эквивалентного по тяге одноканального ПУ, а их размещение на судне требует больше места.
Двухканальные симметричные ПУ устанавливают при необходимости разделения мощности ПУ, т. е. в тех случаях, когда осадка судна не допускает размещения одного ПУ достаточно большого диаметра.
|
 |
|
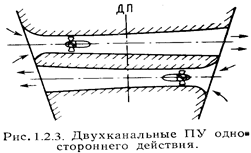
По типу используемого импеллера ПУ разделяются на ПУ с ВРШ, реверсивными ВФШ, двумя ВФШ противоположного вращения, крыльчатыми движителями, а также ПУ с центробежными, осевыми и эжекционными насосами. ПУ с крыльчатым движителем называют ротаторными, а с винтами или насосами – водометными. Применение импеллера того или иного типа определяется его эффективностью в конкретных условиях размещения, видом энергоснабжения, различными специальными требованиями к ПУ.
Канал ПУ. Наиболее распространенной формой канала одноканальных, симметричных ПУ является цилиндрическая, круглая в сечении у ПУ с гребными винтами или прямоугольная у ПУ с крыльчатыми движителями.
Особое значение для эффективности ПУ имеют входная и выходная части канала. Конфигурация входной части канала ПУ должна обеспечивать отсутствие отрыва потока, благоприятное распределение давления и минимум сопротивления входу жидкости.
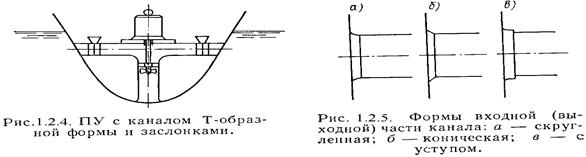
Конфигурация выходной части канала должна обеспечивать устойчивый отрыв струи и минимум потерь на выходе, т. е. иметь острые кромки. Необходимость одновременного удовлетворения обоих требований приводит для симметричных ПУ к компромиссным решениям (рис. 1.41). Наибольшее распространение среди таких решений получило незначительное округление кромок отверстий канала. Иногда используются конические раструбы, но эта форма является уступкой технологии, и ее применение нежелательно.
Большой интерес представляет ступенчатая форма, позволяющая совместить устойчивый отрыв выходящей струи с минимумом потерь на входе.
|
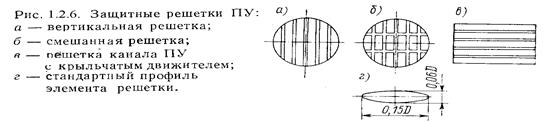 |
Защитные решетки. Защитные решетки устанавливают во входных отверстиях каналов ПУ для предотвращения поломок и засорения ПУ посторонними предметами (рис. 1.42). Следует оговорить, что установка решеток не только защищает ПУ, но и в определенной мере способствует скоплению в его канале посторонних предметов. Поэтому в конструкции ПУ, оборудованного защитными решетками, должна предусматриваться возможность очистки канала от мусора.
Для ПУ с гребными винтами наиболее рациональны вертикальные решетки. При установке ПУ в зоне значительного наклона шпангоутов целесообразно использование горизонтальных решеток с профилировкой, обеспечивающей безотрывное течение в нижней части канала. В некоторых конструкциях применяется смешанный тип решеток, состоящих из вертикальных и горизонтальных элементов. Для защиты каналов ПУ с крыльчатыми движителями обычно применяются горизонтальные решетки. Загромождение сечения канала защитной решеткой во всех случаях не должно превосходить 10%, хотя уже при этом снижение тяги ПУ достигает в зависимости от профилировки и качества исполнения решетки 6-10%. Дальнейшее увеличение загромождения приводит к резкому снижению тяги ПУ (при загромождении, равном 15%, снижение тяги достигает 20%).
 |
|
Дата добавления: 2015-11-18; просмотров: 35116;