Главные движительно-рулевые устройства. 2 страница
Откидные винтовые колонки. Откидные винтовые колонки используются в основном как ПУ в средствах активного позиционирования на буровых установках и судах. Конструктивно они проще, чем винтовые поворотные колонки и создают упор только вдоль одного предусмотренного для них направления. Обычно на одном объекте устанавливается несколько откидных винтовых колонок, направленных в разные стороны. При перемещении объекта в новое положение откидные винтовые колонки убираются для уменьшения сопротивления.
Вспомогательные движительно-рулевые устройства(ВДРУ), в отличие от ПУ, могут создавать необходимую тягу, направление которой меняется в широких пределах.
 Использование ВДРУ определяется необходимостью улучшения маневренных качеств судов отдельных типов или составов в тех случаях, когда главные устройства управления не удовлетворяют предъявляемым к этим качествам требованиям. В качестве ВДРУ могут использоваться активные рули, носовые рули, поворотные винтовые колонки, силовые приставки и вспомогательные суда-кантовщики.
Использование ВДРУ определяется необходимостью улучшения маневренных качеств судов отдельных типов или составов в тех случаях, когда главные устройства управления не удовлетворяют предъявляемым к этим качествам требованиям. В качестве ВДРУ могут использоваться активные рули, носовые рули, поворотные винтовые колонки, силовые приставки и вспомогательные суда-кантовщики.
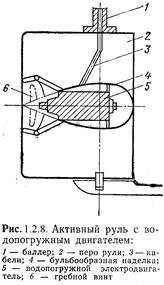
Активные рули (АР) - это рули с установленными на них вспомогательными винтами, расположенными обычно за задней кромкой пера. Винт, как правило, имеет направляющую насадку, которая повышает его к. п. д. и защищает от повреждений.
Энергия к винту может быть подведена двумя путями:
|
посредством конической зубчатой передачи и вертикального вала, проходящего через расточку баллера руля. В последнем случае приводной двигатель располагается в румпельном отделении.
Винт активного руля устанавливают так, чтобы его ось находилась на одной линии с осью основного гребного винта.
 Активный руль перекладывается с борта на борт обычной рулевой машиной, но с целью увеличения эффективности действия угол перекладки должен быть не менее 70°. Когда судно следует под главным движителем (винт АР не работает) со скоростью более 5 уз, перекладка руля осуществляется в обычных пределах - 35° на оба борта. Для этой цели на рулевых машинах устанавливают ограничители, сблокированные с датчиком, помещенным на гребном валу, или управляемые с мостика.
Активный руль перекладывается с борта на борт обычной рулевой машиной, но с целью увеличения эффективности действия угол перекладки должен быть не менее 70°. Когда судно следует под главным движителем (винт АР не работает) со скоростью более 5 уз, перекладка руля осуществляется в обычных пределах - 35° на оба борта. Для этой цели на рулевых машинах устанавливают ограничители, сблокированные с датчиком, помещенным на гребном валу, или управляемые с мостика.
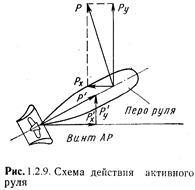
Схема действия активного руля показана на рис. 1.45. При перекладке пера руля на нем возникает боковая сила Ру, к которой добавляется составляющая Ру упора винта. В результате увеличивается боковая сила, действующая на корму судна, и при повороте руля на 90° относительно ДП судна эффект разворачивающего действия винта АР будет максимальным.
Из опыта эксплуатации активных рулей можно сделать некоторые выводы об их достоинствах. Так, активный руль:
позволяет осуществлять повороты не только на малом ходу, но и при полном отсутствии хода;
может служить запасным движителем, причем судно способно двигаться только с его помощью при полном сохранении управляемости;
|
Кроме того:
при совместной работе в результате противоположного вращения основного винта и винта АР снижаются потери на закручивание потока основного винта, что способствует увеличению пропульсивного к. п. д. комплекса;
применение АР в сочетании с носовыми подруливающими устройствами позволяет обеспечивать движение судна лагом;
маневренные качества судна еще более улучшаются, если в качестве движителя АР используется ВРШ.
Но при этом:
наличие АР усложняет и утяжеляет конструкцию пера руля;
в общем случае полное сопротивление судна за счет применения активного руля вместо обычного может увеличиваться на 6- 15%;
этот недостаток можно несколько компенсировать применением ВРШ;
упор винта АР, как и всякого винта фиксированного шага, на заднем ходу меньше упора переднего хода; этот недостаток в известной мере может быть устранен за счет применения ВРШ.
Активные рули, широко применявшиеся в зарубежном и отечественном судостроении в течение 50-70-х годов, в настоящее время устанавливаются на суда сравнительно редко.
Носовые рули. Для улучшения поворотливости и уменьшения ширины ходовой полосы, занимаемой толкаемым составом или крупнотоннажным грузовым теплоходом при прохождении крутых поворотов, на реках находят применение носовые опускающиеся рули. Эти рули размещаются в сквозных нишах корпуса в носовой части передней баржи толкаемого состава или судна с санными обводами и составляют с ДП судна угол 35 -45°. Подъем и опускание носовых рулей производятся с помощью специального дистанционно управляемого привода. В обычных условиях эксплуатации рули подняты, за пределы корпуса судна не выступают и их не используют. При движении по лимитирующему перекату реки носовой руль того борта судна, в сторону которого осуществляется поворот, опускается и на нем возникает боковая сила, способствующая повороту судна или состава.
Поворотные винтовые колонки.Поворотные винтовые колонки (ПВК) уже описывались в разделе главных движительно-рулевых устройств.В качестве ВДРУ ПВК применяются на судах, к которым предъявляются высокие требования в отношении управляемости на предельно малых скоростях хода, а также на судах, которым по условиям эксплуатации необходимо длительное время без хода удерживать в определенном положении ДП или находиться в определенной точке открытого моря. К таким судам относятся рыбоперерабатывающие базы, океанографические и научно-исследовательские суда, кабелеукладчики, суда для обслуживания нефтяных промыслов, плавучие буровые установки и др. ПВК, используемые как ВДРУ, обычно менее мощные, чем ПВК ГДРУ, и выполняются, как правило, откидывающимися или выдвижными. Это позволяет убрать устройство внутрь корпуса, если надобность в нем отсутствует, что предотвращает увеличение сопротивления воды движению судна из-за лобового сопротивления ПВК, а также поломки последних.
Силовые приставки и вспомогательные суда- кантовщики.Силовые приставки (автономные плавучие движительно-рулевые агрегаты) и вспомогательные суда пришвартовываются к борту в носовой части судна или состава для улучшения их управляемости в сложных условиях эксплуатации. Они применяются в речном плавании при недостаточном обеспечении судна или состава главными и вспомогательными устройствами управления и поэтому могут быть отнесены к ВДРУ.
К ВДРУ относятся также вспомогательные буксиры-кантовщики использующиеся в морских портах для перемещения крупных морских судов, не обладающих автономностью в отношении управляемости.
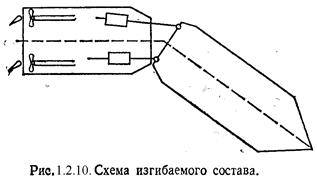 Изгибающие устройствасоставных судов или толкаемых составов представляют собой специфические устройства, рабочим органом которых служит сам корпус судна либо корпуса барж толкаемого состава (рис. 1.46). Изгиб составных судов применяется для облегчения прохода крупнотоннажного речного состава по извилистым рекам с узким судовым ходом. Отдельные суда состава счаливаются в нитку и соединяются шарнирно, благодаря чему переднее судно имеет возможность поворачиваться на некоторый угол относительно заднего, что ведет к ломаному изгибу оси состава. Шарнир снабжен размещаемым на палубе устройством принудительного поворота и удержания взаимного положения судов. Изгибающих устройств по длине состава может быть несколько.
Изгибающие устройствасоставных судов или толкаемых составов представляют собой специфические устройства, рабочим органом которых служит сам корпус судна либо корпуса барж толкаемого состава (рис. 1.46). Изгиб составных судов применяется для облегчения прохода крупнотоннажного речного состава по извилистым рекам с узким судовым ходом. Отдельные суда состава счаливаются в нитку и соединяются шарнирно, благодаря чему переднее судно имеет возможность поворачиваться на некоторый угол относительно заднего, что ведет к ломаному изгибу оси состава. Шарнир снабжен размещаемым на палубе устройством принудительного поворота и удержания взаимного положения судов. Изгибающих устройств по длине состава может быть несколько.

Изгиб состава, меняя его форму, приводит к изменению усилий, действующих на движущийся корпус со стороны воды, и тем самым изменяет движение состава. Практическое распространение получили балочные и безбалочные гидравлические устройства, позволяющие осуществлять принудительный поворот одного судна в составе относительно другого на угол, величина которого колеблется в пределах от 13 до 27°.
Одним из конструкторских бюро Санкт-Петербурга создано гидравлическое изгибающее устройство, позволяющее отклонять толкач от ДП состава и использовать его как большой руль. Это устройство также существенно улучшает управляемость толкаемых составов, особенно при воздействии на них ветра.
Буксирные устройстваслужат для передачи движущей силы с буксира на буксируемый объект (судно, плот, буровую установку и т. п.), могут рассматриваться как вспомогательное средство управления, поскольку эта сила дополняет те силы, которые создают основные СУ буксируемого объекта.
В морских условиях при отсутствии ветра и волнения буксировка больших трудностей не представляет и может быть выполнена любыми судами. В штормовых условиях на буксирном тросе возникают большие усилия, поэтому буксировка крупных объектов (плавдоков, кранов и т.п.) осуществляется специальными океанскими буксирами, которые оборудованы автоматическими буксирными лебедками, подтравливающими буксирный трос в момент рывка. В качестве буксирного троса используют буксирную линию с 2-кратным запасом на разрывное усилие и 6-кратным – на рабочее. Скорость буксировки рассчитывают по упору винта буксира на швартовном режиме и суммарному сопротивлению воды для буксируемого и буксирующего судна. Буксировка может выполняться в кильватер или лагом. Буксировка в кильватер – наиболее простой и удобный способ. Различают буксировку на коротком буксире и на длинном, когда натяжение буксирного троса обеспечивается без выхода его из воды. Ледоколы в Арктике применяют буксировку вплотную. Буксировка лагом (борт о борт) применяют обычно на коротких переходах в тихую погоду с небольшими скоростями.
При буксировке по внутренним водным путям используют четыре способа: в кильватер, лагом, бочонком (в первом и третьем счале одно судно, а во втором - два) и безменом (в первом и втором счалах по одному судну, а в третьем - два).
Если в качестве буксирного судна используется не буксир, то такая буксировка называется буксировкой со вспомогательным судном.
Ограничивающие устройства управления служат для ограничения перемещений судна или его стабилизации в определенном положении. К ним относятся тормозные, якорно-швартовные устройства и системы позиционирования.
Тормозные устройства(ТУ) (рис.1.47), создают силу в направлении диаметральной плоскости, предназначены в отличие от главных движительных устройств не для произвольного управления скоростью, а лишь для уменьшения скорости переднего хода. Действие тормозных устройств проявляется только при наличии скорости судна, для набора которой используется главный двигатель. Если судно имеет скорость переднего хода, то ТУ может действовать и при неработающем главном двигателе, когда судно движется по инерции. Кроме того, ТУ используется и при работе винта на задний ход (режим реверса).
Принцип действия существующих ТУ заключается в увеличении сопротивления воды движению судна или путем протаскивания по дну лотов или волокуш. К тормозным устройствам относятся тормозные парашюты, тормозные щиты, раскрывающийся носовой бульб, опускающиеся носовые рули, лоты и волокуши. Тормозные устройства являются аварийным средством управления и используются, как правило, только в критических ситуациях.
Тормозные парашюты. Тормозные парашюты по принципу действия и назначению аналогичны авиационным. Система тормозных парашютов может рассматриваться как дополнительное средство торможения для больших судов. Парашюты сбрасывают с бортов, а не с кормы во избежание наматывания тросов на винт. Испытания тормозных парашютов в Японии на танкере дедвейтом 50 тыс. т при скорости 10,5 уз показали, что 2 парашюта диаметром 3 м с каждого борта позволяют вдвое сократить тормозной путь и на 20% время торможения.
Тормозные щиты. Идея применения бортовых тормозных щитов была высказана впервые за рубежом (в Нидерландах) и в Советском Союзе. Первоначально считалось, что тормозные щиты можно устанавливать в любом месте судна, но в дальнейшем было признано целесообразным иметь их в кормовой части. Это упростило систему гидравлического управления и улучшило управляемость судна при его движении задним ходом, т. е. при ра-
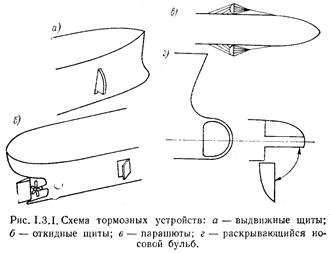 боте гребных винтов на задний ход. С по-мощью тормозных щитов путь свободного торможения может быть, например, сокра-щен в 2,6 раза, а время более чем в 3 раза.
боте гребных винтов на задний ход. С по-мощью тормозных щитов путь свободного торможения может быть, например, сокра-щен в 2,6 раза, а время более чем в 3 раза.
|
Для обеспечения аварийного тормо-жения носовой бульб крупнотоннажного судна может быть выполнен в виде двух раскрывающихся чаш или в виде закрыл-ков, напоминающих жабры, раскрытые навстречу движению. Эффективность рас-крывающегося носового бульба соответ-ствует эффективности тормозных щитов.
Опускающиеся носовые рули.Носовые рули уже были описаны в разделе вспомогательных устройств управления. Их одновременное опускание является довольно эффективным средством торможения толкаемых составов.
Лоты и волокуши. К тормозным устройствам плотов, а иногда и составов относятся лоты и цепи-волокуши, которые опускаются с кормовой части плота и волочатся по грунту. Создающаяся при этом сила трения тормозит движение плота и препятствует перемещению плота за пределы судового хода.
Якорно-швартовные устройства.Эти устройства широко используют в качестве дополнительного средств управления при маневрировании судов для ограничения перемещений и подтягивание их к береговым и плавучим сооружениям или постановке на якорь. Они способствуют также отвалу судна от причала при сильном ветре и течении навальных направлений.
Якорное устройство, помимо удержания судна в определенной позиции и обеспечения отвала судна от причала, может использоваться для экстренного торможения, для чего вытравливается якорь с небольшим количеством якорной цепи, обеспечивающей протаскивание якоря по дну.
Автошвартовые устройства отличаются от обычных швартовных наличием автоматического контроля за натяжением судовых концов. В портах с сильными приливными явлениями такие устройства облегчают работу команды и увеличивают безопасность судна у причала, предотвращая обрыв и провисание концов.
Системы позиционирования или стабилизирующие устройства имеют целью закрепить плавучее сооружение в определенном положении и в заданном ракурсе для осуществления им своих функций. Системы позиционирования в зависимости от типа и назначения плавучего сооружения и условий его эксплуатации в качестве рабочих органов имеют самые различные по своей конструкции системы.
Если на плавучем стабилизируемом объекте ПУ отсутствуют и ограничение его перемещений достигается только с помощью якорных связей, то такая система носит название пассивной. В том же случае, когда удержание установки или бурового судна производится с помощью главных движителей и ПУ, система позиционирования называется активной. В комбинированной системе позиционирования используются как якоря, так и движительно-рулевые и подруливающие устройства.
. На рис.1.48. показана комбинированная система позиционирования плавучей полупогружной буровой установки, состоящая из якорных цепей и ПУ и обеспечивающая определенное положение этой установки над точкой бурения. Наибольшие отклонения установки от вертикали, проходящей через точку бурения, не должны превышать 4% глубины моря при самых неблагоприятных сочетаниях ветра, волнения и течений. Натяжение якорных цепей осуществляется с помощью специальных лебедок. В качестве ПУ используют поворотные или откидные винтовые колонки, которые при переходе буровой установки с одной точки бурения на другую могут использоваться как главные движители. Если на плавучем стабилизируемом объекте ПУ отсутствуют и ограничение его перемещений достигается только с по-
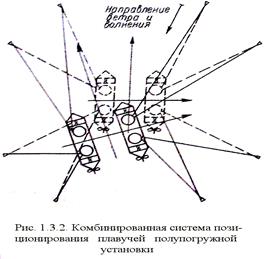 мощью якорных связей, то такая система носит название пассивной. В том же случае, когда удержание установки или бурового судна производится с помощью главных движителей и ПУ, система позиционирования называется активной. Управление системами позиционирования производится или с помощью специальных механизмов, или автоматически.
мощью якорных связей, то такая система носит название пассивной. В том же случае, когда удержание установки или бурового судна производится с помощью главных движителей и ПУ, система позиционирования называется активной. Управление системами позиционирования производится или с помощью специальных механизмов, или автоматически.
Конструкции стабилизирующих устройств для других типов плавучих сооружений (плавучего причала, плавучего крана, земснаряда, дока) имеют свои специфические особенности.
 Задача позиционирования судна, в конечном счете, сводится к контролю за его 3-мя из 6-сти степеней свободы: контролю за поступательным движением, движением лагом и вращением вокруг вертикальной оси. Для этого необходимо знать место судна (широту и долготу) и его курс. Измерение курса судна с достаточной точностью осуществляется с помощью гирокомпаса, а для определения его места применяются специальные высокоточные системы, такие как дифференциальная GPS, гидроакустические системы, система Artemis и Tautwire.
Задача позиционирования судна, в конечном счете, сводится к контролю за его 3-мя из 6-сти степеней свободы: контролю за поступательным движением, движением лагом и вращением вокруг вертикальной оси. Для этого необходимо знать место судна (широту и долготу) и его курс. Измерение курса судна с достаточной точностью осуществляется с помощью гирокомпаса, а для определения его места применяются специальные высокоточные системы, такие как дифференциальная GPS, гидроакустические системы, система Artemis и Tautwire.
Дифференциальная GPS , в отличие от обычной, дает возможность определить место с точно-
стью до 1-3 м благодаря сети береговых станций, передающих поправку к месту, определенному обычной GPS. В настоящее время дифференциальная GPS является наиболее используемой в системах позиционирования.
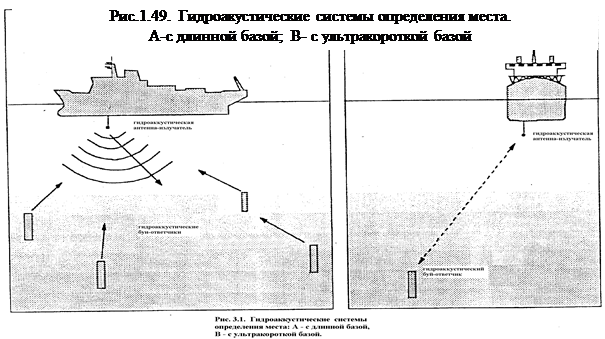 |
Определение места с помощью гидроакустической системы осуществляется с помощью гидроакустических буев-ответчиков, располагаемых на морском дне, и гидроакустической антенны-излучателя, располагаемой на судне и способной с достаточной точностью определить расстояние и направления на буй-ответчик. Различают гидроакустические системы с длинной и ультракороткой базой (рис.1.49).
Система определения места Artemis является микроволновой, и в ее состав входят две микроволновые антенны, расположенные на судне и ориентированы в сторону станции и
 |
на объекте с известным местоположением (рис.1.50). Антенны являются направленными и
на судне такая антенна устанавливается на гидростабилизируемой платформе. Радиус действия такой системы всего 5-10 км.
 |
Принцип определения места с помощью системы Tautwire заключается в измерении угла отклонения от вертикали и вытравленной длины туго натянутого стального конца, при- крепленного к грузу, расположенному на дне (рис. 1.51. )
| |
 |
Определение положения судна и его позиционирование осуществляется для точки, расположенной в пределах судна, называемой центром вращения (ЦВ). В одних системах за центр вращения принимают центр тяжести судна, в других за ЦВ может быть принят, к примеру, кабелеукладочный блок, поворотная платформа буровой передвижной вышки или любая другая точка, позиционирование судна относительно которой необходимо для выполнения его специфических функций. Некоторые системы позиционирования могут иметь несколько ЦВ, выбор которых осуществляется оператором системы.
Современные системы позиционирования являются довольно сложным комплексом, основным контролирующим элементом которого является один или несколько компьютеров. В основном суда с системами позиционирования являются электроходами, т.к. электродвигатели более приспособлены для работы с часто изменяемыми большими нагрузками. В связи с этим, системы позиционирования очень чувствительны к ситуациям полного или частичного обесточивания, поэтому их силовые установки довольно сложны и предусматривают дублирование элементов.
В настоящее время системы позиционирования в основном используют следующие типы судов: танкера-челноки; буровые суда; суда, обеспечивающие водолазные операции; суда, обслуживающие нефтяные подводные скважины; суда для укладки подводных труб;
| |
суда для прокладки подводного кабеля; суда для укладки камней на морское дно; плавучие краны; земснаряды; различные вспомогательные суда; различные пассажирские и специальные грузовые суда; военные суда.
 |
На рис. 1.52. изображены типичные варианты расположения подруливающих устройств на различных специализированных судах, снабженных системами активного позиционирования.
 |
1.3. Маневренные характеристики судна
Для описания поведения судна, как объекта управления, используют совокупность параметров, которые позволяют судить о физических процессах, происходящих при изменении режима его движения, называют маневренными характеристиками. Их подразделяют на две основные группы: инерционно-тормозные и циркуляции (рис.1.53).
| Разгон Spаз, Tpаз |

| Подтормаживание Sптр, Tптр |

  Инерционно-тормозные характеристики Инерционно-тормозные характеристики
|
| Пассивное торможение Sпт, Tпт |

| Активное торможение Sат, Tат |

|
Маневренные характеристики
|
| Постоянная времени задержки поворота Т(d) |

| Устойчивость на курсе, критерий Q |
| Зона неустойчивости +wо, -wо, +dро, -dро |

 Характеристики циркуляции Характеристики циркуляции
|
| Характеристики одерживания поворота tо, qо |
| Выдвиг l1,(d) |
| Прямое смещение l2(d) |
 |

| Диаметр установившейся циркуляции Dу(d) |

Рис.1.53. Классификация маневренных характеристик
К инерционно-тормозным характеристикам относятся: разгон, подтормаживание, пассивное и активное торможение.
Пассивное торможение представляет собой процесс уменьшения скорости движения судна при остановленном главном двигателе за счет сопротивления воды и воздуха.
Активное торможение представляет собой процесс уменьшения скорости движения за счет упора винта, работающего на задний ход.
Разгон представляет собой процесс увеличения скорости от меньшей ступени к большей.
Подтормаживание представляет собой процесс уменьшения скорости от большей ступени к меньшей.
Для характеристики режимов движения установлены градации числа оборотов и соответствующей им скорости переднего хода и числа оборотов заднего хода: передний полный ход ( ПП ); передний полный маневренный ход ( ППм ); передний средний ход ( ПС ); передний малый ход ( ПМ ); передний самый малый ход ( ПСМ ); задний полный ход ( ЗП ); задний средний ход ( ЗС ) ; задний малый ход ( ЗМ ) ; задний самый малый ход ( ЗСМ ) .
Обычно промежуточные режимы задаются по отношению к числу оборотов и скорости полного переднего хода: ППм » 0.9 ПП ; ПС» 0.7 ПП; ПМ » 0.5 ПП; ПСМ » 0.3 ПП. Аналогично для числа оборотов заднего хода : ЗС » 0.7 ЗП; ЗМ » 0.5 ЗП ; ЗСМ » 0.3 ЗП.
Необходимо отметить, что с возрастом на судах несколько уменьшают число оборотов полного хода, по сравнению с теми, которые приведены в судовых документах на момент постройки и считаются номинальными. У судов с ВРШ устанавливают условные деления на шкале ручки управления разворотом лопастей или телеграфа, которые обозначают установленные режимы движения судна. В связи с указанной особенностью при управлении режимом движения на таких судах команды подают не путем задания установленной градации скоростей, а назначают цифру, соответствующую указанному режиму. При этом рекомендуется сначала называть орган управления (руль, двигатель, подруливающее устройство), затем направление (веред, назад, вправо или влево) и затем установленный режим. Например: "Руль вправо 10", "Машина вперед 5", "Подруливающее устройство вправо 3".
Независимо от вида тормозных характеристик ( разгон, подтормаживание, пассивное или активное торможение) их значения могут быть представлены в виде графиков зависимости скорости V(t) и пути S(t) от времени, графиков зависимости значений времени t(V) и пути
S(V) от скорости, линейных графиков в форме Международной морской организации (ИМО)
или в виде таблиц конечных значений пути и времени для различных сочетаний режимов переднего и заднего ходов. В зависимости от способов определения, получения и представления маневренных характеристик различают ( рис.1.54 ):
 Экспериментальный Экспериментальный
|
 Эксперимен-тально-расчетный Эксперимен-тально-расчетный
|
По способу
определения
 коэффициента К и силы упора Рmaxдифференц.
уравнения
движения коэффициента К и силы упора Рmaxдифференц.
уравнения
движения
|
 Расчетный Расчетный
|
Дата добавления: 2015-11-18; просмотров: 2496;