Главные движительно-рулевые устройства. 4 страница
Процесс изменения скорости за счет уменьшения числа оборотов главного двигателя или силы упора движителя получил названиеподтормаживание. При этом процесс движения судна описывается дифференциальным уравнением (1.22), с интегрированием от текущей скорости V1 до Ууст В результате получим формулы для расчета времени tптр и пути Sптр подтормаживания:
 (1.29)
(1.29)
Учитывая, что процесс подтормаживания длится продолжительное время, его можно считать законченным когда значение текущей скорости Vx равно 1.05 Vycт. Подставив его значение в формулы (1.29) получим формулы для расчета конечных значений пути и времени подтормаживания:
 (1.30)
(1.30)
При расчете времени подтормаживания из ходового режима необходимо учитывать время перевода главной силовой установки в маневренный режим. По приведенным формулам можно рассчитать время и путь, проходимый судном за период подтормаживания от ППм до ПСМ.
1.5. Формы представления данных о тормозных характеристиках.
Наиболее полное представление об инерционно-тормозных качествах судна дают значения пути и времени торможения при состоянии в грузу и в балласте для всех возможных сочетаний режимов переднего и заднего ходов. Такими сочетаниями будут:
Таким образом, как видно из приведенного перечня, все возможные случаи использования сочетаний режимов переднего и заднего ходов будут описывать 50 значений пути и такое же количество времени, а с учетом двух состояний - в грузу и в балласте, всего 200.
Столь большое количество характеристик, которые необходимо не только знать, но и учитывать при маневрировании, представляет собой большие трудности для судоводителя. По этой причине представляется чрезвычайно важным определить, в каком виде должны быть приведены данные, чтобы судоводитель мог использовать при работе на мостике. Другим важным вопросом является методика их учета при маневрировании. Обоснованные ответы на поставленные вопросы можно получить только после рассмотрения всех возможных способов представления данных и анализа достоинств и недостатков каждого из них. На основании такого анализа можно определить, какой вид представления и для каких целей необходимо использовать.
По способу представления характеристик различают :- в виде графиков зависимости V и S от времени; - в виде линейных графиков ИМО; - в виде графиков зависимости S и t от скорости переднего хода;- в виде таблиц конечных значений времени и пути.
Графики зависимости V(t) и S(t) (рис.1.59) достаточно подробно описывают процесс маневрирования, однако их требуется большое количество для полной характеристики динамики судна, как объекта управления (около 18 листов по 5 характеристик на каждом). Выборка данных о t и S торможения на мостике практически исключена, поскольку сам процесс их получения занимает достаточно много времени, которое соизмеримо со временем маневрирования и необходимые данные запаздывают кмоменту принятия решения. Поэтому такой вид представления рекомендуется при проведении научно-исследователь-ских работ и в учебном процессе в морских учебных заведениях.
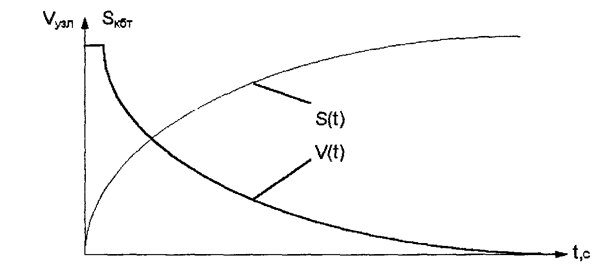
Рис. 1.59 График зависимости скорости и пути от времени для режима ППм - ЗС
Линейные графики ИМО (рис.1.60) обладают той же информативностью, что и V(t) и S(t). Однако они неудобны в работе из-за трудности интерполяции при выборке t и V на нелинейной шкале. Кроме того, они громоздки, требуется 5 листов по 20 характеристик на каждом. Несмотря на то, что они рекомендованы ИМО и требуется их наличие на судне, трудоемкость процесса выборки и большое их количество, отсутствие данных для используемых режимов, по-видимому, делают нецелесообразным, а иногда и невозможным, их использование на мостике.
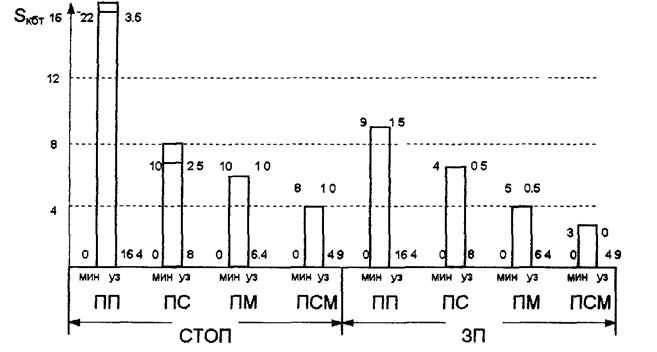
Рис. 1.60 Фрагмент линейных графиков в форме ИМО в грузу
Графиков зависимости времени и пути от начальной скорости при различных режимах работы машины на задний ход (рис. 1.61), требуется 6 листов по 8 характеристик на каждом. Они удобны для выбора при назначении безопасной скорости, не требуется градация скоростей переднего хода. Достаточно подробны, однако выборка данных на мостике затруднена, из-за необходимости интерполяции. Рекомендуется для использования в ЭВМ при проведении научных исследований, при выполнении дипломных и курсовых работ в морском учебном за
 |
ведении.
Таблицы характеристик торможения конечных значений времени и пути для состояний в грузу и в балласте для всех режимов помещаются на одной странице, а выборка данных занимает мало времени (см.табл.1.2.).
Таблица 1.2 - Инерционно-тормозные характеристики т/х " Харитон Греку "
| Режим переднего хода в балласте Тср =8.05 м, D=41770 т. | ||||||||||
| ПСМ | ПМ | ПС | ППм | ПП | Режим ЗХ | |||||
| t,мин | S,кбт | t,мин | S,кбт | t,мин | S,кбт | t,мин | S,кбт | t,мин | S,кбт | |
| 28.7 | 16.9 | 31.7 | 21.0 | 33.8 | 24.9 | 34.0 | 25.5 | 34.7 | 27.0 | Стоп |
| 5.6 | 4.1 | 6.3 | 5.7 | 7.4 | 8.2 | 7.6 | 8.7 | 8.2 | 10.3 | ЗП |
| 7.8 | 5.3 | 8.7 | 7.25 | 9.8 | 9.9 | 10.1 | 10.4 | 10.7 | 12.0 | ЗС |
| 12.1 | 7.3 | 13.3 | 9.7 | 14.5 | 12.55 | 14.7 | 13.1 | 15.4 | 14.6 | ЗМ |
| 19.0 | 9.95 | 20.5 | 12.85 | 21.8 | 15.9 | 22.1 | 16.4 | 22.7 | 17.95 | ЗСМ |
| Режим переднего хода в грузу Тср =12.33 м, D=66000 т. | ||||||||||
| ПСМ | ПМ | ПС | ППм | ПП | Режим ЗХ | |||||
| t,мин | S,кбт | t,мин | S,кбт | t,мин | S,кбт | t,мин | S,кбт | t,мин | S,кбт | |
| 43.9 | 24.8 | 49.6 | 32.1 | 53.5 | 39.0 | 53.5 | 39.0 | 55.0 | 42.35 | Стоп |
| 6.7 | 4.65 | 7.8 | 7.0 | 9.5 | 10.85 | 9.5 | 10.85 | 10.9 | 14.2 | ЗП |
| 9.5 | 6.2 | 10.9 | 9.05 | 12.7 | 13.25 | 12.7 | 13.25 | 14.2 | 16.6 | ЗС |
| 15.1 | 8.8 | 16.9 | 12.5 | 18.9 | 17.15 | 18.9 | 17.2 | 20.4 | 20.5 | ЗМ |
| 24.00 | 12.5 | 26.4 | 17.0 | 28.7 | 22.15 | 28.7 | 22.15 | 30.2 | 25.5 | ЗСМ |
Рекомендуется для использования на мостике и в ЭВМ, при планировании маневров судна.
Из представленных в табл. 1.2. данных характеристик только 20 имеются в настоящее время на судне. Сложилась парадоксальная ситуация, когда на судне имеются характеристики, которые не должны использоваться в нормальных условиях, а тех, которые необходимы для планирования маневров, нет.
Для получения полных данных о динамике судна необходимо дополнить программу сдаточных испытаний, введением в перечень выполняемых маневров - разгон из неподвижного состояния, подтормаживание и торможение ЗС и ЗМ. Результаты определений и расчетов целесообразно свести в одну книгу "Информация о маневренных характеристиках для капитана". Характеристики пассивного и активного торможения, разгона и подтормаживания можно представить в виде рекомендуемом ИМО и в виде таблиц, которые рекомендуется поместить в штурманской рубке, для оперативного получения сведений, при необходимости планирования маневров.
В соответствии с рекомендациями ИМО каждое судно должно быть обеспечено информацией о маневренных элементах. Наставлением по организации штурманской службы на судах Украины (РШСУ-98) предусмотрен минимум сведений, включаемых в информацию о маневренных элементах, а также указана форма их представления.
Поворотливость судна представляется в Информации в виде вычерченных в масштабе траекторий движения судна (циркуляций) при перекладке руля на борт и на 150 вправо и влево. На траекториях указываются точки, соответствующие определённым изменениям курса с начала циркуляции: в первой четверти циркуляции - через 100, во второй – через 300, и далее – через 900.
По инерционно-тормозным характеристикам в Информацию включаются сведения о свободном торможении и торможении полным задним ходом соответственно с полного, полного маневренного, среднего, малого и самого малого передних ходов. Эти сведения для каждого манёвра даются в виде линейного вертикального графика, длина которого в принятом масштабе выражает тормозной путь. Кроме того, на графиках через каждую минуту времени от начала торможения делаются засечки, против которых указывается скорость судна в данной точке. В начале графика, внизу, указывается начальная скорость для данного манёвра.
Графики активного торможения строятся до полной остановки судна, а для пассивного ‑ до скорости, составляющей 20% от скорости полного хода судна. Элементы поворотливости и торможения повторяются для двух состояний судна - в грузу и в балласте.
В Информацию включаются также элементы ходкости в виде таблиц и графиков зависимости скорости судна от оборотов винта в грузу и в балласте.
Маневренные элементы могут определяться любыми натурными или натурно-расчётными методами, обеспечивающими точность конечных результатов не хуже ±10% от измеряемой величины. Натурные наблюдения допускается проводить при ветре до 4 баллов и волнении до 3 баллов.
Для приближенного определения характеристик активного торможения автором совместно с Интабли Мухаммедом было предложено рассчитывать их по значению коэффициента энерговооруженности:
 (1.31)
(1.31)
где 0,8 - коэффициент, учитывающий использование главной машины в маневренном режиме при работе на задний ход; Ne - мощность главного двигателя; D - водоизмещение судна.
Как следует из самой сути введенного коэффициента между величиной тормозного пути S и Кэн существует функциональная зависимость в вид< гиперболы:
 (1.32)
(1.32)
Выполнив исследования зависимости тормозного пути от Кэн на ММ маневрирования Pilot, разработанной профессором Деминым С.И., для тринадцати типов судов - "Харитон Греку", "Капитан Темкин", "Профессор Аничков" и др. для состояния в грузу и в балласте, при различных значениях начальных скоростей и режимов работы назад автором и Интабли Мухаммедом были получены зависимости S(Кэн). После проведения регрессионного анализа были рассчитаны выражения для определения S (в длинах корпуса судна) по значению Кэн:
При Vн= 2 узла  (1.33)
(1.33)
При Vн= 4 узла  (1.34)
(1.34)
При Vн= 6 узлов  (1.35)
(1.35)
Функциональная зависимость тормозного пути в длинах корпуса судна может быть представлена в виде, учитывающем и начальную скорость:
 (1.36)
(1.36)
где Fr – число Фруда равное  .
.
Приведенная зависимость (1.36) может быть использована на любом морском судне для оценки величины тормозного пути при лоцманской проводке и плавании в стесненных условиях для глазомерной оценки обстановки.
1.5. ОПРЕДЕЛЕНИЕ МАНЕВРЕННЫХ ЭЛЕМЕНТОВ ИЗ НАТУРНЫХ ИСПЫТАНИЙ.
Организация натурных наблюдений.Натурные методы определения маневренных элементов, способные обеспечить достаточно высокую точность, основаны, как правило, на последовательных определениях места судна по каким-либо ориентирам в процессе выполнения заданных манёвров. Обсервации при этом выполняются через короткие промежутки времени. Моменты времени при каждой обсервации фиксируются по пущенному в начале манёвра секундомеру. После окончания наблюдений обсервованные точки наносят на карту крупного масштаба или на планшет. Соединяя точки плавной кривой, получают траекторию движения судна в процессе манёвра. Такая траектория позволяет непосредственно измерить в принятом масштабе нужные элементы маневрирования, а замеченные по секундомеру моменты дают возможность получить соответствующие временные промежутки.
Достоинствами такого метода являются наглядность и возможность обнаружения промаха, если таковой допущен в отдельных обсервациях. Использование береговых ориентиров для обсервации визуальными способами связано с неудобствами из-за необходимости маневрирования вблизи берега, на котором расположены ориентиры, так как на больших расстояниях точность обсерваций визуальными способами снижается. Кроме того, глубины в районе маневрирования должны быть достаточно большими, чтобы исключить влияние мелководья, а сам район не должен находиться на пути движения других судов. Выполнение перечисленных условий затрудняет выбор подходящего полигона.
В последнее время у нас и за рубежом маневренные элементы иногда определяют с использованием фазовой РНС "Декка", способную обеспечить удовлетворительную точность обсерваций и в то же время позволяющую выполнять наблюдения в удалении от берегов и оживлённых судоходных путей. Общим недостатком использования неподвижных ориентиров, включая РНС "Декка", является тот факт, что если в районе наблюдений имеется неизвестное течение, то результаты измерений окажутся искажёнными под его влиянием.
С внедрением спутниковых систем в практику судовождения появилась возможность высокоточного определения траектории с использованием дифференциального режима. Точность такого способа достигает 3-5 метров. Однако, как и в случае с РНС, результаты измерений окажутся искажёнными под влиянием неизвестного судоводителю течения.
Лишёнными перечисленных недостатков являются способы определения маневренных элементов по свободно плавающему ориентиру, в качестве которого можно использовать изготовленную на судне вешку, плотик или другой предмет, сброшенный для этой цели с борта судна.
Такие определения можно выполнять в открытом море, вдали от навигационных опасностей, выбрав для этого благоприятную погоду. Кроме того, на результаты определений по свободно плавающему ориентиру течение не влияет, так как оно одинаково сносит как судно, так и ориентир, не изменяя их взаимного расположения.
Обсервации выполняются по пеленгу и дистанции, которые затем прокладываются на планшете в принятом масштабе относительно произвольно отмеченного положения ориентира.
Пеленга на ориентир можно взять достаточно точно с помощью оптического пеленгатора гирокомпаса, а дистанцию измерить с помощью судовой РЛС или по углу снижения, измеренному секстаном.
При наблюдениях с помощью РЛС в качестве плавающего ориентира нужен предмет, хорошо отражающий радиоволны. Этому требованию удовлетворяют буй или веха, снабжённые радиолокационным пассивным отражателем. Такую веху несложно изготовить на судне. Можно также использовать рабочий плотик. Вместо отражателя можно применить несколько жестяных банок из-под краски и т.п. На ориентире следует установить флаг, который был бы хорошо различим на фоне моря, например, оранжевого цвета.
На мостике кроме руководителя испытаний должны находиться три наблюдателя: у РЛС, у пеленгатора, у тахометра, а также регистратор с секундомером и заранее приготовленными бланками для записи наблюдений.
В процессе выполнения манёвров через короткие промежутки времени, например 20-30 с. берут пеленга плавающего ориентира и одновременно измеряют расстояние до него с помощью РЛС, а также замечают при этом обороты винта, и иногда, скорость по лагу.
Все измерения должны выполняться одновременно по команде руководителя, после чего в заранее установленной последовательности сообщать отсчёты регистратору который в момент команды замечает и записывает отсчёт по секундомеру, а затем вносит в бланк сообщаемые наблюдателями величины. Рулевой должен замечать и сообщать регистратору курс судна на момент команды. Секундомер пускается заранее или в момент начала манёвра.
Целесообразно первые измерения выполнять до начала данного манёвра с тем, чтобы наблюдатели успели освоиться.
В зависимости от того, какой манёвр выполняется, нужно фиксировать моменты отдельных событий, характеризующих данный манёвр. Так, например, при выполнении торможения с помощью реверса двигателя началом манёвра считается момент дачи команды по машинному телеграфу. Затем нужно зафиксировать момент начала снижения оборотов двигателя, момент начала вращения винта назад, а также момент полной остановки судна относительно воды, т.е. конец манёвра.
При выполнении манёвра на циркуляции судна началом считается момент подачи команды о перекладке руля. Затем нужно зафиксировать момент, когда перо руля будет переложено на заданный угол, а также моменты изменения курса на 90, 180, 270 и 3600(Если изменения выполняются довольно часто, то эти моменты можно определить опытным путём интерполяции при последующей обработке наблюдений). Во время наблюдений следует также отметить с какого крыла мостика-правого или левого берутся пеленга, чтобы затем при прокладке можно было приблизительно учесть поправку за полуширину судна. Измеряемые дистанции соответствуют расстояниям от ориентира до антенны РЛС.
По выполненным измерениям на листе миллиметровой бумаги в масштабе наносят положения судна относительно ориентира. Если мостик судна смещён относительно мидель-шпангоута, то это нужно учесть при прокладке, чтобы получить траекторию центра тяжести судна, принимаемой на мидель-шпангоуте. Ниже в таблице 1.3, в качестве примера, приводится форма бланка для записи измерений.
Таблица 1.3
Форма бланка для записи результатов наблюдений
| Номера измерений | Момент по секундомеру, мин.сек. | ГКК град. | ГКП град. | D кбт. | n об/мин | V узл. | Примечание |
С полученной на планшете траектории снимают в принятом масштабе требуемые элементы маневрирования.
Точность определения места судна во время манёвра зависит от точности измерения двух навигационных параметров- пеленга и дистанции. При этом очень важно, чтобы плавающий ориентир хорошо отражал радиоволны и давал чёткую отметку на экране РЛС. Как показывают результаты натурных испытаний, при благоприятных условиях наблюдений и опытном операторе у РЛС может быть достигнута точность обсерваций порядка 8-15 м на расстояниях от ориентира до одной мили.
При этом следует учитывать, что на совсем малых расстояниях (менее 2-3 кбт) радиолокационные дистанции могут содержать систематическую ошибку, связанную с нелинейностью развёртки вблизи центра экрана РЛС. Это приводит к тому, что измеренные дистанции оказываются меньше действительных, причём с уменьшением дистанции ошибка возрастает.
При наблюдениях по углу снижения способ основан на определении дистанции до плавающего ориентира по измеренному секстаном вертикальному углу снижения. Этот угол х является разностью между углом наклонения зрительного луча D и углом наклонения горизонта d, что показано на рис.1.62.
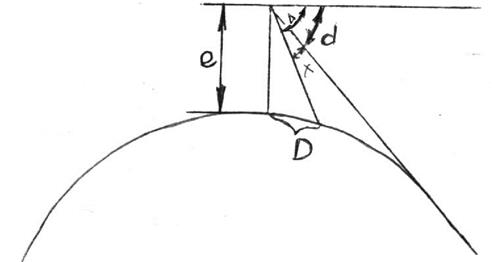
Рис.1.62. Определение расстояния по углу снижения плавающего ориентира
Из мореходной астрономии известна формула для угла наклонения зрительного луча:
 (1.37.)
(1.37.)
где D-дистанция, кбт;
e-высота глаза, м;
D-наклонение зрительного луча, дуговые минуты.
Разрешение этой формулы относительно D даёт:
или с учётом значения D из формулы(1.37):
 (1.38.)
(1.38.)
Расчёт расстояний непосредственно по формуле (1.38.) при использовании ЭКВМ особых затруднений не вызывает, но требует значительной затраты времени. С целью экономии времени построена специальная номограмма, приведённая на рис.1.63., с которой по высоте глаза и измеренному углу снижения снимается расстояние до ориентира в кабельтовых.
Измеренный секстаном угол нужно исправить поправкой индекса. Высоту глаза следует измерять рулеткой с точностью до 0.1м.
При построении номограммы принимались табличные значения наклонения горизонта. Как известно, фактическое значение наклонения иногда может отличаться от табличного. Поэтому, для повышения точности измерения дистанций рекомендуется тщательно измерить наклонение горизонта с помощью наклонометра, а затем из табл.11-а МТ-75 по измеренному наклонению горизонта(если оно отличается от табличного)обратным входом выбрать табличное значение высоты глаза. После этого в номограмму следует входить не с фактической высотой глаза, а с табличным значением высоты, полученным, как указано выше.
Порядок и организация проведения натурных наблюдений в принципе остаются такими же, как и при использовании РЛС. Разница состоит лишь в том, что вместо наблюдателя у РЛС участвует наблюдатель с секстаном, измеряющий углы снижения.
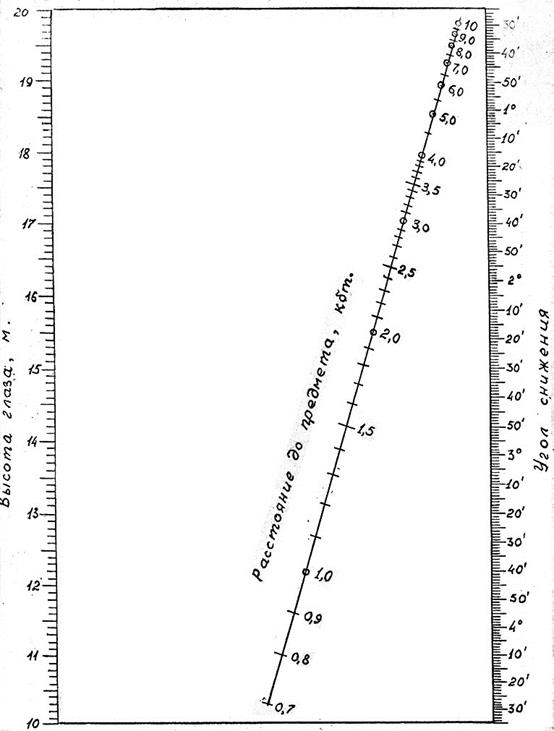
Рис. 1.63. Номограмма для расчета расстояния до ориентира по углу снижения
При выполнении наблюдений по углу снижения лучше, если команды о выполнении измерений будет подавать сам наблюдатель с секстаном. Если команды подаются другим лицом, то в момент подачи команды наблюдатель с секстаном может оказаться не вполне подготовленным, что снизит точность измерения углов снижения.
Формулу для оценки точности измерения дистанции в зависимости от точности измерения угла снижения получим, если продифференцируем выражение(1.38). Переходя к конечным превращениям и подставляя вместо них стандартные ошибки, найдём:
 (1.39)
(1.39)
Как видно из полученной формулы стандартная ошибка дистанции mD при данной ошибке измерения угла eх возрастает с увеличением расстояния до ориентира D и уменьшением высоты глаза е.
При благоприятных условиях наблюдений(чёткая линия горизонта) стандартная ошибка измерения угла снижения eх составляет для опытного наблюдателя, примерно, 0.5 дуговой минуты.
Как показывают результаты многочисленных натурных наблюдений при выполнении манёвров на расстояниях до 6-7 кбт. от ориентира стандартная ошибка обсерваций в зависимости от условий наблюдений колеблется от 3 до 8 м. Таким образом, способ обсерваций по гирокомпасным пеленгам и дистанциям по углу снижения обеспечивает высокую точность траекторных измерений и, следовательно, высокую точность определения маневренных элементов.
1.6. УПРАВЛЯЕМОСТЬ СУДНА.
Устойчивость на курсе и поворотливость.Управляемостью называется качество судна, позволяющее двигаться по заданной траектории или менять направление движения в соответствии с воздействием средства управления (руль, поворотная насадка). Управляемость зависит как от свойств самого судна, определяемых комплексом корпус- рулевое устройство-винт, так и от внешних условий: ветра, волнения, а также глубин и рельефа дна при плавании на мелководье, глубины и ширины канала при плавании в узостях.
Так, например, судно, обладающее удовлетворительной управляемостью при данных условиях, может оказаться неуправляемым после изменения осадки или дифферента. Судно может также потерять способность управляться под влиянием ветра и волнения в зависимости от их направления по отношению к диаметральной плоскости. Существенно изменяется управляемость судна на мелководье и в узостях.
Следует отметить также, что в условиях ветра управляемость судна существенно зависит от отношения его скорости к скорости ветра, так как боковая сила, создаваемая рулевым устройством(РУ), примерно пропорциональна квадрату скорости потока, в котором находится рабочий орган РУ, а поперечная аэродинамическая сила пропорциональна квадрату скорости ветра. Влияние скорости на управляемость проявляется только при наличии ветра.
Управляемость характеризуется двумя свойствами судна- устойчивостью на курсе и поворотливостью.
Устойчивостью на курсе называется способность судна сохранять заданное направление прямолинейного движения. Различают два вида устойчивости: теоретическую (автоматическую) и эксплуатационную.
Под теоретической устойчивостью подразумевается способность судна удерживаться на постоянном курсе без воздействия рулевого устройства. На практике такой устойчивости не встречается. Реальные суда бывают либо теоретически неустойчивыми (когда после прекращения действия возмущения судно входит в самопроизвольную циркуляцию), либо не асимптотически устойчивыми(когда после прекращения действия возмущения угловая скорость судна стремится к нулю).
Эксплуатационной устойчивостью называется способность судна сохранять заданное направление движения с помощью перекладок руля. Очевидно, что эксплуатационной устойчивостью должно обладать каждое судно.
Для оценки эксплуатационной устойчивости на курсе часто применяют критерий Q:

 (1.40.)
(1.40.)
где  -средняя амплитуда рыскания судна;
-средняя амплитуда рыскания судна;
 -средняя амплитуда перекладок руля;
-средняя амплитуда перекладок руля;
V-скорость судна;
L-длина судна между перпендикулярами;
tн-время, в течении которого выполнялись наблюдения;
n-число перекладок руля во время наблюдений.
Величина Q остаётся практически постоянной при данной загрузке судна и не зависит от индивидуальных качеств рулевого.
Существуют и другие виды критерия устойчивости на курсе.
Поворотливость. Поворотливостью называется способность судна изменять направление движения и двигаться по траектории заданной кривизны.
Поворотливость зависит от многих условий. Главными из них являются: характеристики средства управления; характеристики корпуса судна; внешние условия.
Главным средством управления на подавляющем большинстве морских судов является рулевое устройство, рабочим органом которого является руль(иногда поворотная насадка). К характеристикам руля относятся его размеры, форма и размещение.
Под размещением руля подразумевается его расположение относительно движителя (струи от движителя). Существуют два способа его размещения – в струе от винта, непосредственно за ним, или вне струи. При размещении в струе от винта его эффективность повышается в 2-2.5 раза, за счет того, что скорость потока воды, обтекающего руль, в 1.3 – 1.6 раза больше скорости судна относительно воды. Сила на руле пропорциональна квадрату скорости потока.
Влияет на поворотливость и способ соединения руля с корпусом: является ли руль подвесным или устанавливается за рудерпостом.
При отклонении руля от диаметральной плоскости на нём возникает боковая гидродинамическая сила.
Иногда на судах вместо руля устанавливается направляющая насадка на винт, скреплённая с вертикальным баллером, с помощью которого её можно поворачивать в горизонтальной плоскости до 30-350 вправо и влево.
Боковая сила, возникающая на насадке, примерно на 40-50% выше, чем на пере руля, имеющем те же размеры (в проекции на ДП) и расположенном в винтовой струе. Это объясняется тем, что перекладка насадки обеспечивает более интенсивное отклонение потока от винта, чем перекладка руля.
Дата добавления: 2015-11-18; просмотров: 2283;