Влияние параметров корпуса и руля на управляемость.
Как вытекает из теоретических представлений и подтверждается практическими наблюдениями на управляемость судна оказывают влияние следующие величины: отношение длины судна к его ширине L/B, отношение осадки к длине T/L, коэффициент общей полноты d, форма оконечностей судна, дифферент, площадь, форма и размещение руля. Рассмотрим коротко влияние каждой из перечисленных величин.
Влияние отношения L/B. Увеличение L/B приводит к росту гидродинамической силы Rky, что ведёт к уменьшению угла дрейфа на циркуляции и, следовательно, к сохранению высокой линейной скорости, так как сопротивление воды при малых углах дрейфа возрастает незначительно. Кроме того, при увеличении L точка приложения силы Rky смещается в сторону кормы, при этом увеличивается демпфирующее действие момента Mk, входящего в третье уравнение системы (1.3.), что приводит к уменьшению угловой скорости w (скорость изменения курса). Таким образом, увеличение L/B значительно ухудшает поворотливость судна.
Влияние отношения T/L. Увеличение T/L тоже приводит к росту силы Rky, но в то же время точка приложения её смещается в сторону носа, что уменьшает демпфирующее действие момента Mk. В результате при увеличении отношения T/L поворотливость изменяется незначительно.
Влияние коэффициента dоп . На поворотливость судна значительно влияет коэффициент продольной полноты j, который выражается отношением dоп к коэффициенту полноты мидель-шпангоута bÄ, т.е.j=dоп /bÄ. Увеличение j приводит к уменьшению силы Rгу и уменьшению демпфирующего момента Mг. Поэтому увеличение dоп значительно улучшает поворотливость.
Влияние формы носовой и кормовой оконечностей. Значительное влияние на поворотливость оказывает степень подреза штевней, критерием которой является коэффициент полноты диаметральной плоскости. Особенно сильно влияет степень подреза кормы. Чем больше кормовой подрез, тем больше смещается в нос точка приложения силы Rгy, что приводит к улучшению поворотливости. С другой стороны, даже небольшое увеличение площади дейдвуда резко ухудшает поворотливость.
Степень подреза кормы можно охарактеризовать коэффициентом полноты площади погруженной части диаметральной плоскости  sк, рассчитываемом с учётом величины кормового подреза по формуле:
sк, рассчитываемом с учётом величины кормового подреза по формуле:
 (1.61.)
(1.61.)
где fk-площадь кормового подреза- площадь фигуры, заключённой между кормовыми перпендикуляром (осью баллера руля) и контуром кормовой оконечности (снимается в масштабе с чертежа бокового вида), м2;
L-длина между перпендикулярами, м;
T-средняя осадка, м.
Носовой подрез влияет на поворотливость значительно меньше. Если носовой подрез велик, как, например, у ледоколов, то поворотливость несколько ухудшается.
Влияние дифферента. Дифферент судна вызывает смещение точки приложения Rгy. Дифферент на нос улучшает поворотливость, но ухудшает устойчивость на курсе, т.е. увеличивает рыскливость. Дифферент на корму ухудшает поворотливость, но увеличивает устойчивость на курсе.
Влияние площади, формы и размещение руля. Форма руля, как уже отмечалось, характеризуется обычно его относительным удлинением lр=hр 2/Sр. Увеличение lр при неизменной его площади Sр увеличивает подъёмную(боковую) силу руля Rрy, что приводит к улучшению поворотливости.
Увеличение площади руля Sр также увеличивает подъёмную силу, но в то же время увеличивает и демпфирующее действие руля. Таким образом, увеличение площади руля приводит к улучшению поворотливости при больших углах перекладки, а при малых отклонениях руля поворотливость ухудшается.
Расположение руля относительно винта(винтов) значительно влияет на поворотливость. Если руль расположен в винтовой струе, то скорость натекания воды на руль увеличивается вследствие влияния винта, что вызывает значительное улучшение поворотливости. Эффект винтовой струи и проявляется тем сильнее, чем большая площадь руля попадает в поток от винта Этот эффект проявляется особенно сильно в режиме разгона судна, а по мере приближения скорости к установившемуся для данного режима значения уменьшается.
Основные элементы циркуляции, выраженные в длинах корпуса- выдвиг `l1, прямое смещение `l2, тактический диаметр`D т и диаметр установившейся циркуляции`Dуст –для одновинтовых судов можно приближённо определить по эмпирическим формулам, полученным по результатам обработки натурных наблюдений. Формулы приведены с указанием относительных средних квадратических отклонений (в процентах):
 (1.62)
(1.62)
 (1.63.)
(1.63.)
 (1.64.)
(1.64.)
 (1.65.)
(1.65.)
где d0-угол перекладки руля, градусы;
y0-угол дифферента ( 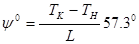 ), градусы;
), градусы;
Ф- фактор корпуса и руля, рассчитанный по формуле:
 (1.66.)
(1.66.)
где S%-относительная площадь руля, выраженная в процентах (  )
)
Пользуясь фактором корпуса и руля Ф, можно также определить приближённо относительную скорость судна на установившейся циркуляции:
 (1.67.)
(1.67.)
Приведенные формулы дают средние значения элементов циркуляции без учёта несимметричности траекторий при поворотах вправо и влево, иногда наблюдаемых на одновинтовых судах.
Несимметричность траекторий возникает также при крене. Даже небольшой угол крена способен резко ухудшить поворотливость в сторону накренённого борта. При этом поворотливость в сторону повышенного борта улучшается.
1.9. Учет характеристик поворотливости при маневрировании
Поворот судна в открытом океане, при плавании вдали от навигационных опасностей, не представляет затруднений, а при использовании карт 1: 50000 и мельче вообще не выражается в масштабе и принимается за точку При плавании в стесненных водах планирование поворота приобретает первостепенное значение Существует три способа планирования поворота ручной, автоматизированный и автоматический.
При ручном планировании поворота необходимые исходные данные судоводитель должен определять по характеристикам поворотливости до начала поворота. Они включают в себя координаты точек начала и конца поворота, пеленги и расстояния до приметных ориентиров в эти моменты. Рулем в процессе поворота управляет матрос. Контроль процесса поворота заключается в определении места судна в моменты его начала и окончания. Движение на криволинейной траектории часто не контролируется из-за того, что определение места занимает длительное время и такая информация запаздывает ко времени принятия решения по управлению Для того, чтобы контролировать снос при повороте, обычно применяют ускоренные способы определения места. В этом случае, при подготовке к плаванию, наносят сетки изолиний, которые существенно ускоряют процесс контроля и позволяют получить оперативную информацию о местоположении судна.
При автоматизированном выполнении поворота рутинную работу по расчету необходимых данных - момента начала поворота, выбора угла перекладки руля, определения координат текущего положения, наступление момента сдерживания судна производит ЭВМ Судоводитель отдает необходимые команды рулевому и контролирует по экрану ЭВМ положение фактических координат относительно плановых и корректирует движение судна При автоматическом выполнении поворота процесс движения планирует и осуществляет ЭВМ без участия судоводителя и рулевого Судоводитель осуществляет контроль за нормальной ее работой и, при возможности, визуально оценивает положение судна относительно знаков навигационной обстановки
В настоящее время существует два способа планирования точек при повороте и выполнения поворота, которые отличаются методом учета характеристик поворотливости. Первый [11,12] основан на выборе угла перекладки руля по величине изменения курса, расчете или переносе соответствующего участка кривой характеристик поворотливости на карту с последующим определением координат начала, окончания и промежуточных точек циркуляции
При этом за начало поворота принимают, как и при выполнении натурных испытаний по определению характеристик поворотливости, момент подачи команды на перекладку рyля. Контроль процесса поворота осуществляют по гирокомпасу
Второй способ основан на выборе угла перекладки в соответствии с величиной установившегося значения радиуса кривизны траектории. Он предполагает поддержание угловой скорости поворота постоянной в течение всего времени циркуляции, переменными кладками руля. Контроль поворота осуществляют по датчику угловой скорости и гирокомпасу. Недостатком этого способа является то, что он не позволяет установить соответствие фактического и запланированного пути. Управление производят по установившемуся значению угловой скорости (а значит и радиуса циркуляции), в то время, когда судно движется в маневренном режиме. Переменные углы перекладки руля, которые при этом используются, увеличивают ширину полосы маневренного смещения. Последнее в опасных районах стесненных вод имеет первостепенное значение.
Для учета характеристик поворотливости при планировании поворота можно предложить три способа- отрезков, перпендикуляров и эллипса [12].
Недостатком способа отрезков является ухудшение точности нанесения траектории при углах поворота более 150°.От способа отрезков легко перейти к перпендикулярам. Приближенные зависимости для расчета перпендикуляров имеют вид
HP= l1 - DT /2+(DT /2)*tg( q/2)+l2 *tg( q /2)*cosq (1.68)
KP = l2 *tg(q /2)*sinq
В формуле (1.68) приняты условные обозначения: Н- точка начала поворота; Р- точка пересечения перпендикуляра, опущенного из точки окончания поворота, на линию первоначального курса; К- точка окончания поворота; Q - угол поворота.
Способ перпендикуляров дает возможность построения траектории для углов поворота без ограничений. Недостатком способа является невозможность определить координаты начала поворота относительно точки М пересечения путей до и после поворота. значения которых известны с карты. Поэтому приходится определять точку начала поворота методом отрезков, а затем наносить траекторию относительно точки начала поворота При использовании этого способа в ЭВМ для планирования поворота необходимо заранее рассчитать таблицу значений перпендикуляров для различных углов перекладки руля для состоянию в грузу и в балласте и помещать в память машины в виде массива. При аналитическом решении задачи учета характеристик поворота можно использовать аппроксимацию кривой циркуляции участками эллипса, с представлением результатов в виде перпендикуляров. Координаты точек поворота относительно точки начала циркуляции приведены в табл. 1.5.
Таблица 1.5
Координаты точек поворота относительно точки начала циркуляции, рас
считанные методом эллипса для т/х “Акад.С.Королев” в балласте.
| Тср=6.94м d=15 вправо l1=3.7кбт l2= 2.6кбт Dт=5.1кбт Dу=3.9кбт | |||||||||
| q | |||||||||
| HP | 0/6 | 1.2 | 1.7 | 2.2 | 2.7 | 3.1 | 3.4 | 3.6 | 3.7 |
| KP | 0.0 | 0.2 | 0.3 | 0.6 | 0.9 | 1.3 | 1.7 | 2.1 | 2.6 |
| q | |||||||||
| HP | 3.8 | 3.7 | 3.7 | 3.6 | 3.4 | 3.1 | 2.9 | 2.6 | 2.2 |
| KP | 3.0 | 3.3 | 3.7 | 4.0 | 4.3 | 4.6 | 4.8 | 5.0 | 5.1 |
| q | |||||||||
| HP | 1.9 | 1.5 | 1.2 | 0.9 | 0.6 | 0.3 | 0.1 | -0.1 | -0.2 |
| KP | 5.2 | 5.1 | 5.1 | 5.0 | 4.8 | 4.5 | 4.3 | 4.0 | 3.6 |
| q | |||||||||
| HP | -0.3 | -0.2 | -0.2 | -0.1 | 0.1 | 0.4 | 0.6 | 0.9 | 1.3 |
| KP | 3.3 | 2.9 | 2.6 | 2.3 | 2.0 | 1.7 | 1.5 | 1.3 | 1.2 |
При планировании поворота и движении судна во время его выполнения будем рассматривать принципы управления с учетом внешних воздействий и выбора направления перемещения: курсовой; по отклонению; по возмущению; комбинированный [11]. Использовать курсовой принцип при повороте не представляется возможным. При управлении по отклонению первоначальную перекладку руля изменяют всякий раз, когда производят определение места. Этот способ можно использовать только при автоматизации поворота и движении по пологим криволинейным траекториям значительной продолжительности и ручном управлении. При управлении по возмущению траекторию планируют без учета внешних условий , по значению путевых углов, снятых с карты. Однако курс перед входом и после выхода из циркуляции назначают с учетом дрейфа и сноса течением. Комбинированный способ можно использовать только при автоматическом выполнении поворота.
При маневрировании судна будем различать два способа его управления по криволинейной траектории - рулем и курсом. При управлении рулем судоводитель, выполняющий. маневрирование, задает углы его перекладки, а рулевой только выполняет команды. Качество управления зависит от квалификации судоводителя. При управлении курсом рулевому задают направление движения, предоставляя ему выбор углов перекладки руля перед входом в поворот и при его одерживании. Качество управления при этом зависит от рулевого.
Рассмотренные методы учета характеристик поворотливости и способы управления судном, позволяют выполнить автоматизацию процесса расчета плановых координат траектории при циркуляции, с учетом конфигурации акватории и маневренных характеристик. Автоматизация любого технологического процесса, к которым можно отнести и управление судном, предполагает наличие заданного алгоритма функционирования системы управления и информации о фактическом состоянии системы, по значениям которых, вырабатывается сигнал рассогласования. В соответствии с полученным сигналом система управления вырабатывает необходимое воздействие для приведения к заданному состоянию.
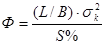
В качестве заданного алгоритма при повороте выступает точка начала перекладки руля, величина угла перекладки, координаты криволинейной траектории, момент сдерживания, угол сдерживания, точка окончания поворота. Задача не представляет особой сложности при движении судна по прямолинейным траекториям. Трудность обычно состоит в том, чтобы задать криволинейную траекторию точками, соответствующими характеристикам, и положению судна при заданном угле перекладки руля. Траекторию движения при повороте можно назначать выбором точки начала поворота и угла кладки руля (рис 1.68.1), либо выбором угла кладки руля при неизменной, определяемой навигационными условиями точке.
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
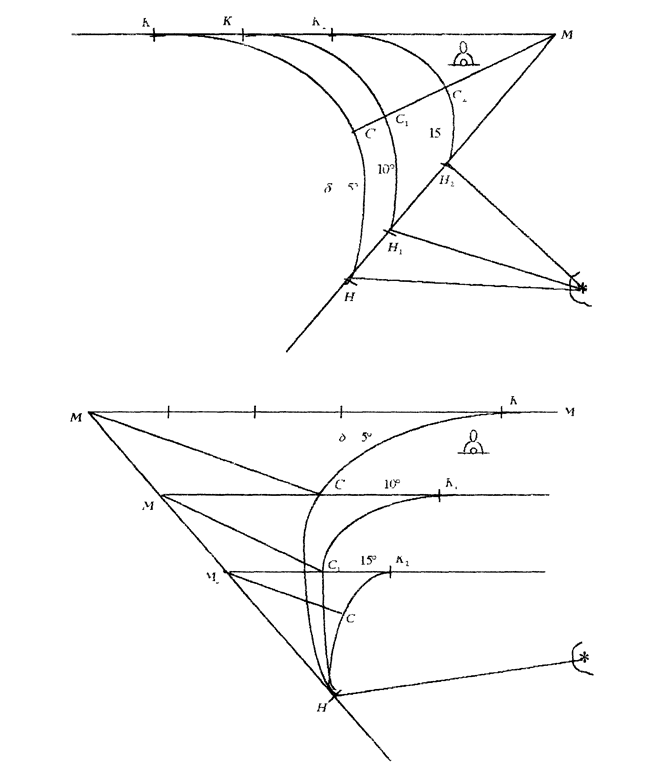
Рис 1.68. Прокладка поворота на карте 1) выбором точки начала поворота и угла
кладки руля; 2) выбором угла кладки руля
начала поворота (рис 1.68.2). После того, как выбран угол перекладки руля, производят определение величины отрезков МН и МК и рассчитывают координаты точек начала, конца и промежуточных. Расчет производят по координатам (снятым с карты) точки пересечения линии курса до и после поворота.
1.10. СОВМЕСТНОЕ ВЛИЯНИЕ ГРЕБНОГО ВИНТА И РУЛЯ ПРИ МАНЕВРИРОВАНИИ.
Силы и моменты, возникающие при работе гребного винта.Вращающийся гребной винт на движущемся судне совершает поступательное движение со скоростью судна VS и вращательное движение с угловой скоростью  =2pn (n-число оборотов винта в 1 с).
=2pn (n-число оборотов винта в 1 с).
Рассмотрим движение элемента винта, показанного на рис.1.69. в виде сечения его лопасти на каком-то радиусе r.
Рис.1.69. Силы, действующие при вращении винта
Скорость поступательного движения элемента -аксиальная скорость - равна скорости судна относительно невозмущённой воды Vs, а окружная скорость элемента равна ωr=2pnr. Абсолютная скорость элемента относительно невозмущённой воды V0 равна геометрической сумме аксиальной и окружной скоростей.
Таким образом, элемент лопасти можно рассматривать как крыло, движущееся в воде с углом атаки a0. При этом на элементе возникает гидродинамическая сила dP, пропорциональная углу атаки. Аксиальная составляющая этой силы dPx, является подъёмной силой элемента лопасти, а поперечная составляющая dPY – лобовым сопротивлением этого элемента. Произведение лобового сопротивления на радиус даёт момент dM=dPY·r относительно оси вращения винта, возникающий на данном элементе.
Если проинтегрировать dPx и dM по длине лопасти и умножить на число лопастей, получится, соответственно, сила упора винта P, обеспечивающая поступательное движение судна, и момент M, преодолеваемый двигателем.
Как уже отмечалось, скорость Vs является аксиальной скоростью винта относительно невозмущённой воды. В реальных же условиях за корпусом судна, движущемся со скоростью Vs, возникает попутный поток, средняя скорость которого равна DV. Благодаря попутному потоку фактическая аксиальная скорость винта относительно воды оказывается меньше Vs на величину DV, т.е.
Vр= Vs-DV (1.69)
При этом очевидно (см. рис.1.70.), что действительный угол атаки a>a0. Так как гидродинамическая сила dP, пропорциональная углу атаки, то при его возрастании от a0 до as сила DP увеличивается, а также увеличивается сила лобового сопротивления DPy. Отметим что попутный поток, увлекаемый корпусом судна, имеет неодинаковые скорости по высоте. В верхней части, благодаря более полным отводам кормы, скорость попутного потока больше средней скорости DVср, а в нижней- меньше, потому и углы атаки на лопастях в верхней части диска винта больше, чем в нижней, следовательно, и сила DPy для лопасти в верхнем положении больше, чем для лопасти повёрнутой вниз. Поскольку силы DPy для лопасти в верхнем и нижнем положениях направлены противоположно, то очевидно, что результирующая этих сил В для винта правого вращения (см. рис. 1.69.) стремится сместить корму влево.
Если же судно движется вперёд, а винт работает назад, то благодаря попутному потоку углы атаки на лопастях в верхнем и нижнем положении уменьшаются в большей степени, чем в нижнем, вследствие чего результирующая сила В сохраняет своё направление, по- прежнему стремясь сместить корму влево.
Отметим, что при движении судна назад или при отсутствии движения попутный поток у винта отсутствует, поэтому сила В не возникает.
Таким образом на судне с одним винтом правого вращения сила В, возникающая благодаря влиянию попутного потока действует только при движении судна вперёд и, независимо от направления вращения винта стремится сместить корму в сторону левого борта.
Кроме попутного потока на работу винта оказывает влияние и близость поверхности воды и подсос воздуха к лопастям в верхней половине диска винта, независимо от направления его вращения. При этом лопасти в верхнем положении встречают меньше лобовое сопротивление, чем в нижнем. Вследствие этого возникает результирующая поперечная сила реакции воды D, всегда направленная в сторону вращения винта, т.е. при вращении по часовой стрелке- вправо, против часовой стрелки‑ влево. На судне с винтом правого вращения сила реакции воды D при работе винта вперёд стремится сместить корму вправо, а при работе назад- влево, независимо от направления движения судна. С уменьшением осадки кормы и, особенно при частичном оголении винта сила реакции D возрастает.
Таким образом, при движении судна вперёд и вращении винта вперёд силы В и D направлены в противоположные стороны, а при движении судна вперёд и вращении винта назад силы В и D складываются и стремятся развернуть корму в сторону левого борта.
Заканчивая рассмотрение сил и моментов на вращающемся гребном винте, необходимо отметить также, что вращающийся в любую сторону винт при его перемещении в поперечном направлении, т.е. по оси Y, испытывает значительно большее сопротивление со стороны воды, чем остановленный.
Поперечная составляющая скорости у винта появляется при движении судна с углом дрейфа на циркуляции или при плавании постоянным курсом с углом ветрового дрейфа и, в частности, при свободном дрейфе с остановленными машинами.
Последний случай имеет практическое значение при управлении судном. При наличии ветра судно с остановленными машинами дрейфует, обычно, приблизительно лагом к ветру. В этих условиях сила давления ветра уравновешивается гидродинамической силой на корпусе Rky, т.е. силой сопротивления воды. Если же дать ход машине вперёд или назад, то вращающийся винт по сравнению с неподвижным будет испытывать повышенное боковое сопротивление воды. Это приведёт к смещению точки приложения силы Rky в корму, а момент этой силы вызовет разворот носа судна в подветренную сторону.
Силы взаимодействия винтовой струи с рулём и корпусом судна.Гребной винт при вращении вперёд или назад не только отбрасывает поток воды в соответствующую сторону, но также и закручивает его, т.е. придаёт потоку воды не только аксиальную, но и тангенциальную скорость. При этом, независимо от направления работы винта, в верхней части диска тангенциальные скорости потока меньше, чем в нижней.
При работе винта правого вращения на передний ход закручивание потока приводит к косому натеканию воды на руль. Скос потока в верхней половине струи направлен вправо, а в нижней –влево. При этом скос потока в нижней части диска, благодаря повышенной тангенциальной скорости, бывает больше, чем в верхней. Если площадь пера руля, попадающая в струю от винта, распределяется одинаково между верхней и нижней половинами струи, то на не переложенный руль будет действовать результирующая сила набрасывания воды на руль С, стремящаяся переместить корму влево.
Часто на современных судах рули имеют клиновидную форму и располагаются за винтами таким образом, что в верхнюю половину струи попадает большая часть площади руля. Благодаря этому обстоятельству, сила С, стремящаяся при не переложенном руле переместить корму влево, частично или полностью компенсируются. Как показывают натурные наблюдения, многие современные суда при циркуляции влево обладают несколько лучшей поворотливостью, чем при циркуляции вправо.
При вращении винта назад закрученный поток от винта набрасывается на кормовую часть судна. При этом, благодаря направлению закручивания потока против часовой стрелки, с правого борта под кормовым подзором создаётся повышенное давление воды, а с левого борта- пониженное. В связи с перепадом давления результирующая сила-сила набрасывания струи на корпус С1- всегда направлена влево, т.е. стремится развернуть корму в сторону левого борта.
Дата добавления: 2015-11-18; просмотров: 4081;