Главные движительно-рулевые устройства. 5 страница
Большое значение для поворотливости судна имеют параметры его корпуса, характеризуемые отношениями L/B и коэффициентами общей полноты d, а также форма оконечностей судна (степень подреза оконечностей) и дифферент.
На одновинтовых судах циркуляции вправо и влево могут существенно отличаться из-за несимметричного влияния струи от винта.
Из рассмотренного выше очевидно, что устойчивость на курсе и поворотливость являются противоположными качествами- при улучшении устойчивости на курсе поворотливость ухудшается, и наоборот. В то же время оба этих качества являются полезными, поэтому при проектировании судов стремятся найти, в зависимости от типа и назначения судна, целесообразное сочетание этих качеств. На судах, которым по характеру их работы предстоит частое маневрирование в стеснённых условиях, для повышения поворотливости нередко устанавливают средства активного управления.
Движение судна под влиянием переложенного руля.При движении судна с переложенным рулём, центр тяжести описывает траекторию, называемую циркуляцией. При этом нос судна отклоняется внутрь циркуляции, т.е. между диаметральной плоскостью и касательной к траектории имеется угол подреза, называемый углом дрейфа на циркуляции.
Подводная часть судна ведёт себя как крыло, двигающееся в воде возникает подъёмная сила. Поперечная составляющая гидродинамической силы Rгу и является подъёмной силой корпуса, рассматриваемого как крыло. Значение этой силы, распределённой по длине корпуса судна, пропорционально углу атаки, т.е. углу дрейфа. При движении с постоянным по длине корпуса углом дрейфа (это бывает при движении близком к прямолинейному) точка приложения равнодействующей подъёмной силы смещена к передней кромке крыла, т.е. к носовой части судна.
Циркуляция характеризуется линейной и угловой скоростями, радиусом кривизны и углом дрейфа. Эти характеристики не остаются постоянными, поэтому процесс циркуляции принято делить на три периода.
Первый период- маневренный -продолжается от момента подачи команды на перекладку руля до времени перекладки руля на заданный угол. Второй период- эволюционный- начинается с момента окончания перекладки руля и заканчивается, когда характеристики циркуляции примут установившиеся значения. Третий период- установившийся- начинается с момента окончания второго периода и продолжается до тех пор, пока руль остаётся в переложенном положении. За начало циркуляции принимается момент подачи команды на перекладку руля.
Переложенный на угол d руль, как и всякое крыло, развивает подъёмную силу – боковую силу руля Rру, под влиянием которой корпус испытывает поперечную силу Rгу, приложенную в центре тяжести G и момент Mг относительно вертикальной оси Z. Это показано на рис.1.64.
В первый период после начала циркуляции под влиянием поперечной силы Rру возникает угол дрейфа и ц.т. судна приобретает движение во внешнюю сторону циркуляции, т.е. происходит обратное смещение, при этом на корпусе также появляется подъёмная сила – поперечная гидродинамическая сила Rгу направленная внутрь циркуляции, точка приложения которой смещена в нос от цт. Момент этой силы Mг в этом периоде имеет тот же знак, что и момент руля Mр поэтому угловая скорость начинает быстро возрастать.

|
|
|
|

|
|
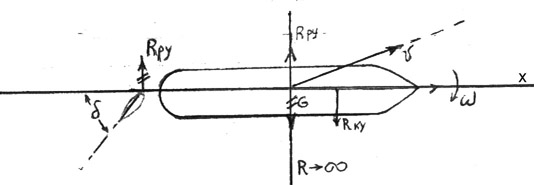
Рис.1.64. Движение судна с переложенным рулем
В дальнейшем под влиянием поперечной силы Rгу траектория ЦТ начинает постепенно искривляться в сторону перекладки руля, т.е. радиус начинает уменьшаться.
При движении ЦТ по криволинейной траектории с радиусом R каждая точка по длине судна описывает относительно общего центра циркуляции О свою траекторию. Радиус кривизны ее отличается от R. При этом каждая такая точка имеет свой угол дрейфа, значение которого возрастает по мере удаления в сторону кормы. В нос от ЦТ углы дрейфа соответственно уменьшаются, как показано на рис.1.65. Если же из центра циркуляции О опустить перпендикуляр на диаметральную плоскость (ДП), то в полученной точке ПП угол дрейфа равен нулю. Эта точка носит название центра вращения или полюса поворота.
Полюс поворота при циркуляции для большинства судов располагается вблизи носовой оконечности - на расстоянии примерно 0.4 длины судна от центра тяжести принимаемого на мидель-шпангоуте.
 | |||
 | |||
 |

|
 |
|
 |
|  |
Рис.1.65. Изменение угла дрейфа по длине судна
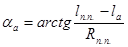
Угол дрейфа цт судна на циркуляции определяется по формуле:
 (1.41)
(1.41)
где ln.n.-расстояние полюса поворота от центра тяжести.
Для произвольной точки а угол дрейфа будет:
 (1.42)
(1.42)
где lа- расстояние от точки а до центра тяжести(в корму знак «-»).
На судах, имеющих крутую циркуляцию, угол дрейфа может достигать 200 и более.
Как уже отмечалось, подъёмная сила пропорциональна углу атаки, а так как углы дрейфа возрастают по длине корпуса в сторону кормы, то точка приложения поперечной гидродинамической силы Rгу по мере искривления траектории смещается в сторону кормы, а момент этой силы Мг постепенно уменьшаясь меняет знак и начинает действовать противоположно моменту руля Мр, т.е. становится демпфирующим. Рост угловой скорости при этом замедляется, а когда моменты Мр и Мг становятся равными по абсолютной величине, угловая скорость стремится к установившемуся значению  уст.
уст.
Благодаря сопротивлению переложенного руля (сила Rpx) и некоторому увеличению сопротивления корпуса при движении с углом дрейфа, а также проекции Рх центробежной силы, линейная скорость судна V постепенно уменьшается, стремясь к некоторому значению Vуст..
Чем лучше поворотливость, т.е. чем большую кривизну имеет траектория, тем больше снижается скорость на циркуляции. В среднем, на крупнотоннажных морских судах при повороте на 900 скорость снижается, приблизительно на1/3, а при повороте на 1800 –вдвое.
1.7. Основные сведения о судовых рулях и движителях
Угол поворота рулей относительно диаметральной плоскости называется углом перекладки руля. Под термином “перекладка руля” понимают процесс поворота пера руля из одного положения в другое. Максимальный угол перекладки руля на морских судах обычно ограничивают 350, поскольку дальнейшая перекладка руля, не приводит к увеличению его поперечной силы. Дальнейшее увеличение угла перекладки кроме малой эффективности ведет к резкому увеличению нагрузки на оси баллера, что требует утяжеления привода рулей и повышения мощности рулевой машины.
Площадь пера руля, которая требуется для обеспечения необходимой управляемости, зависит от назначения и геометрических размеров судна, формы обводов кормы, скорости хода и расположения руля относительно винта. Для сравнения эффективности рулей различных судов принято рассматривать относительную площадь руля Ар и фактор руля и корпуса Ф. Значение Ар определяют по формуле:
Ар = L · Tcp / Sp , ( 1.43 )
где L - длина судна между перпендикулярами;
Тср - средняя осадка;
Sp - площадь пера руля ( суммарная площадь рулей).
Значение коэффициента Ар лежит в пределах от 10 ( речные колесные суда) до 85
( трансатлантические быстроходные пассажирские суда).
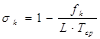
Форма кормовой оконечности характеризуется коэффициентом полноты площади погруженной части ДП - sк, который определяют по формуле:
 ,
,  ( 1.44 )
( 1.44 )
где fk - площадь подреза кормы, ограничиваемая кормовым перпендикуляром, базовой линией и контуром кормы. Кроме площади пера руля на управляемость существенно влияет и его форма, которая характеризуется его относительным удлинением lр , которое определяют по формуле:
 , ( 1.45)
, ( 1.45)
где hp - высота руля по баллеру.
Увеличение площади пера руля увеличивает его поперечную силу Rpy, но вместе с тем увеличивается и демпфирующее действие руля. Поэтому увеличение его площади приводит к улучшению поворотливости только при больших углах перекладки руля.
У судов с большим значением коэффициента полноты sк поворотливость будет хуже, а устойчивость на курсе лучше, чем у судов с меньшим значением sк .
Увеличение относительного удлинения руля lр при неизменной площади Sp приводит к возрастанию поперечной силы руля Rpy , что приводит к некоторому улучшению поворотливости.
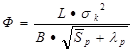
Фактор руля и корпуса определяют по формуле:
 , ( 1.46 )
, ( 1.46 )
где  - относительная площадь пера руля в процентах, определяется
- относительная площадь пера руля в процентах, определяется
= Sp /L/ Tcp . Полученное значение Ф используется для расчетного определения эле-ментов циркуляции и потери скорости при повороте.
Cилы, действующие на переложенный руль, с учетом взаимодействия между рулевым устройством и корпусом судна, в связанных с судном осях ( Х - положительное направление в нос, У - положительное направление в правый борт ) можно определить ( рис. 5 ) :
 ( 1.47 )
( 1.47 )
 (1.48 )
(1.48 )
где Срх - безразмерный коэффициент сопротивления руля ;
Vp - скорость потока воды набегающего на руль;
Spe - эффективная площадь руля;
r - плотность воды;
Spy - безразмерный коэффициент боковой силы руля.










 Vp
Vp
ap

Rpy
Rp
 Rpx
Rpx
d
Рис.1.66 Схема сил, действующих на руль
Значение боковой силы руля, с учетом изменения направления потока, можно определить по формуле:
 , ( 1.49 )
, ( 1.49 )
где Сруa - коэффициент производной боковой силы руля по углу атаки;
aр - угол атаки руля.
Величину угла атаки можно определить из выражения:
aр = 
 (1.50 )
(1.50 )
где  - эффективный коэффициент влияния корпуса и винта на руль;
- эффективный коэффициент влияния корпуса и винта на руль;
 - относительное плечо силы на руле, равное = lp / L;
- относительное плечо силы на руле, равное = lp / L;
 - угол дрейфа на циркуляции;
- угол дрейфа на циркуляции;
 - угловая скорость вращения судна.
- угловая скорость вращения судна.
Значение Сруa можно определить по формуле:
Сруa = kтр · Сруaр , ( 1.51 )
где kтр - коэффициент типа руля, равный для обычных рулей -1.0, для рулей за рудерпостом - 1.3, для поворотных насадок - 0.9.
Значение Сруaр для обычных рулей можно определить по формуле:
 ( 1.52 )
( 1.52 )
где Ср - поправочный коэффициент, равный единице для прямоугольных и трапециевидных рулей; для полубалансирных рулей его значение можно определить из табл. 1.4, составленной по графику, приведенному в справочнике по теории корабля. Для промежуточных значений величину Ср можно получить путем линейной интерполяции.
Таблица 1.4
Значение поправочного коэффициента Ср
 lр 0.5 1.0 1.5 2.0 lр 0.5 1.0 1.5 2.0
|
| Ср 1.0 0.86 0.73 0.6 |
Значение коэффициента определяют по формуле:
=  ·
·  D ( 1.53 )
D ( 1.53 )
где  -коэффициент влияния корпуса; D- коэффициент влияния винта.
-коэффициент влияния корпуса; D- коэффициент влияния винта.
Значения коэффициентов и D можно найти по рекомендациям ,помещенным в справочнике по теории корабля .
Сила упора винта на переднем установившемся ходу равна сопротивлению движению корпуса судна ( строго говоря надводной и подводной частей, однако учитывая малую долю сопротивления воздуха при тихой погоде по сравнению с сопротивлением воды ею пренебрегают), которое можно рассчитать по формуле:
Pe = кV2 , ( 1.54 )
где к - коэффициент сопротивления корпуса, значение которого можно определить по формуле Демина С.И. :
 к = 5880 + 0.654 W Ö В / Тср , ( 1.55 )
к = 5880 + 0.654 W Ö В / Тср , ( 1.55 )
где W - площадь смоченной поверхности, которую с достаточной для практики точностью можно рассчитать:
W = D2/3 ( 4.854 + 0.492 B / Tcр ) , ( 1.56 )
где D - водоизмещение судна в тоннах.
Сила упора винта Pmax , которую он развивает к моменту остановки судна, является силой упора винта при нулевой поступи. Для изолированного винта ( без учета влияния корпуса судна на его работу) сила упора “ на швартовах” рассчитывается по формуле:
Ршв = кр r n2 Dв4 , ( 1.57 )
где кр - коэффициент упора винта на заднем ходу в режиме “на швартовах”;
r - массовая плотность воды;
n - число оборотов винта в секунду;
Dв - диаметр винта.
 Значение коэффициента упора выбирают из специальных диаграмм для расчета винтов, помещенных в справочнике по теории корабля. С достаточной для практических потребностей судовождения точностью его можно рассчитать по известной эмпирической формуле:
Значение коэффициента упора выбирают из специальных диаграмм для расчета винтов, помещенных в справочнике по теории корабля. С достаточной для практических потребностей судовождения точностью его можно рассчитать по известной эмпирической формуле:
кр = 3Ö Q ·Z ( 0.225 sin2 Hв + 0.098 sin Hв ), ( 1.58 )
где Q - дисковое отношение винта;
Z - число лопастей винта;
Нв - шаговое отношение винта, равное отношению шага винта к его диаметру Нв = Н / Dв .
Если гребной винт имеет направляющую насадку, то полученное значение кр следует умножить на коэффициент 0.85.
Влияние корпуса на работу винта учитывается коэффициентом усиления упора Суу , величина которого зависит от соотношения площадей диска винта Ad и погруженной части мидель-шпангоута SÄ . Его значение может быть определено по эмпирической формуле С.И.Демина:
Суу = 0.508 + 0.106 SÄ / Ad , ( 1.59 )
где значение SÄ = B Tср bÄ ; bÄ - коэффициент полноты мидель-шпангоута;
Значение Аd рассчитывается по формуле: Аd = p· Dв2 / 4.
C учетом изложенного максимальную силу упора винта рассчитывают по формуле:
Pmax = Pшв · Суу ( 1.60)
Точность определения значения Pmax по приведенной методике характеризуется стандартной относительной погрешностью равной 12.3%.
Дата добавления: 2015-11-18; просмотров: 1798;