Использование зондирующего сигнала
В некоторых инженерных приложениях входной процесс  не наблюдается, но имеется возможность подать на вход системы известный зондирующий сигнал
не наблюдается, но имеется возможность подать на вход системы известный зондирующий сигнал  , независимый от естественного входа (рисунок 2.7).
, независимый от естественного входа (рисунок 2.7).
Разумно предположить, что  не зависит от
не зависит от  и
и  , а не зависит от
, а не зависит от  и
и  .
.
Применение финитного преобразования Фурье к реализациям достаточно большой длины  приводит к следующим соотношениям между величинами, указанными на рисунке 2.7:
приводит к следующим соотношениям между величинами, указанными на рисунке 2.7:
 , (2.57)
, (2.57)
где  ,
,
 .
.
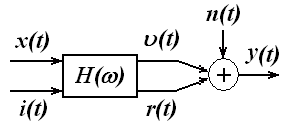
– естественный ненаблюдаемый входной процесс;
– известный наблюдаемый зондирующий сигнал;
, – ненаблюдаемые реакции на и соответственно;
– ненаблюдаемый шум на выходе системы;
 – суммарный наблюдаемый процесс на выходе
– суммарный наблюдаемый процесс на выходе
Рисунок 2.7 – Система с зондирующим сигналом и шумом на выходе
По предположению следующие взаимные спектральные плотности равны нулю:

Поэтому с учетом (2.57) для регистрируемых спектральных плотностей имеем
 , (2.58)
, (2.58)
 . (2.59)
. (2.59)
Поскольку процесс не наблюдаем, для оценки частотной характеристики системы невозможно использовать стандартную формулу через взаимную спектральную плотность
 .
.
Однако соотношение (2.59) показывает, что при известном зондирующем сигнале имеет место равенство
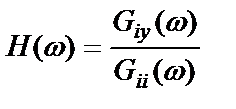 , (2.60)
, (2.60)
которое дает несмещенную оценку  независимо от шума на выходе и каких-либо предположений относительно естественного входа
независимо от шума на выходе и каких-либо предположений относительно естественного входа  .
.
В качестве зондирующего сигнала  часто выбирают ограниченный по частоте белый шум, имеющий постоянную спектральную плотность в широкой полосе частот
часто выбирают ограниченный по частоте белый шум, имеющий постоянную спектральную плотность в широкой полосе частот  .
.
В этом случае частотная характеристика равна
 . (2.61)
. (2.61)
Как только частотная характеристика системы определена по формулам (2.60) или (2.61) , зондирующий сигнал отключают и уравнение (2.57) принимает вид
 ,
,
откуда, наблюдая только процесс  , получают выходную спектральную плотность
, получают выходную спектральную плотность
 . (2.62)
. (2.62)
Если вклад шума на выходе системы невелик  , то справедливо приближенное равенство
, то справедливо приближенное равенство
 ,
,
следовательно
 . (2.63)
. (2.63)
Формула (2.63) дает полезную информацию о спектральной плотности  , даже если процесс
, даже если процесс  не наблюдается. В частности,
не наблюдается. В частности,  может быть собственным шумом системы на входе, а – собственным шумом на выходе, вызванном .
может быть собственным шумом системы на входе, а – собственным шумом на выходе, вызванном .
Контрольные вопросы
1. Перечислите свойства идеальной системы и объясните их смысл.
2. Сформулируйте определение импульсной характеристики системы.
3. Каким преобразованием связаны между собой частотная и импульсная характеристики идеальной системы?
4. Перечислите способы расчета амплитудной частотной характеристики системы.
5. Сформулируйте теорему о спектре производной.
6. Запишите основные спектральные соотношения для идеальной системы.
7. Осуществите расчет функции когерентности для идеальной системы.
8. Как влияет наличие некоррелированных шумов на входе и выходе системы на спектральные соотношения?
9. Запишите выражение для частотной характеристики системы с обратной связью.
10. С какой целью может использоваться зондирующий сигнал?
Литература
1. Сергиенко, А.Б. Цифровая обработка сигналов / А.Б. Сергиенко. – М: Питер, 2002.– 604 с.
2. Садовский, Г.А. Теоретические основы информационно-измерительной техники / Г.А. Садовский. – М.: Высшая школа, 2008. – 480 с.
3. Бендат, Д. Применение корреляционного и спектрального анализа / Д. Бендат, А. Пирсол. – М.: Мир, 1983. – 312 с.
4. Бендат, Д. Измерение и анализ случайных процессов / Д. Бендат, А. Пирсол. – М.: Мир, 1974. – 464 с.
Дата добавления: 2015-08-14; просмотров: 689;