Системи регулювання з додатковим імпульсом за похідною з проміжної точки
Такі системи регулювання використовують тоді, коли об’єкт має регульований технологічний параметр, розподілений за просторовою координатою (наприклад, апарати колонного типу, трубчасті реактори, кожухотрубні теплообмінники з великою довжиною та ін.). Особливість таких об’єктів полягає в тому, що основною регульованою координатою є технологічний параметр на виході з апарата, збурення розподілені за довжиною апарата, а регулюючий вплив подається на його вхід. При цьому одноконтурні замкнені системи регулювання не забезпечують необхідної якості перехідних процесів через велику інерційність каналу регулювання.
Подавання на вхід регулятора додаткового імпульсу з проміжної точки апарата дає випереджаючий сигнал і регулятор включається в роботу раніше, ніж вихідна координата відхилиться від заданого значення.
Для забезпечення регулювання без статичної похибки необхідно, щоб в усталених режимах додатковий імпульс зникав. Для цього допоміжний імпульс пропускають через реальну диференціальну ланку з передаточною функцією.
Wд (s)= Кд  , /4.14/
, /4.14/
 де Кд- коефіцієнт передачі;
де Кд- коефіцієнт передачі;  ,
,  - сталі часу.
- сталі часу.
Ефективність уведення додаткового імпульсу залежить від точки його вибору, яку визначають у кожному конкретному випадку динамічними властивостями об’єкта та умовами його роботи.
Розрахунок подібних систем регулювання аналогічний розрахунку каскадних АСР.
На рис. 4.5. допоміжну формує ланцюжок, який складається з вимірювального перетворювача ВП1 проміжної координати  , проміжного перетворювача ПП1 та реальної диференцюючої ланки D. Вихідний сигнал диференціатора надходить на вхід регулятора R. Цей зворотний зв’язок є гнучким і працює лише в перехідних режимах роботи.
, проміжного перетворювача ПП1 та реальної диференцюючої ланки D. Вихідний сигнал диференціатора надходить на вхід регулятора R. Цей зворотний зв’язок є гнучким і працює лише в перехідних режимах роботи.
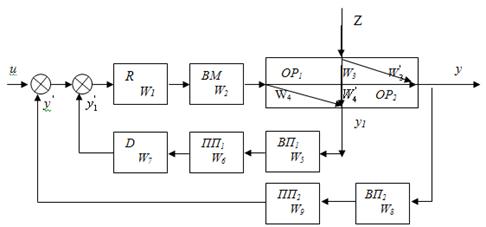
Рис. 4.5. Структурна схема АСР із допоміжною похідною
Як правило, такі АСР досліджуються по каналу збурення, розподіленого за просторовою координатою. Збурення Z діє як на вихідну координату об’єкта у, так і на проміжку у1.Завдяки тому, що технологічний параметр розподілений за лінійною координатою, дія збурення Z на проміжну координату у1 відбудеться швидше, ніж на координату у. Тому регулятор R почне працювати з моменту появи сигналу у1 і значно швидше, ніж зміниться сигнал у.
Структурна АСР із допоміжною похідною подібна каскадній, тобто має два контури: внутрішній і зовнішній. Передаточна функція для внутрішнього контура по каналу регулювання (при зміні завдання регулятора u) має вигляд:
 , /4.15/
, /4.15/
а по каналу збурення  :
:
 /4.16/
/4.16/
Передаточна функція АСР по каналу регулювання  :
:
 /4.17/
/4.17/
а по каналу збурення  :
:
 /4.18/
/4.18/
Із рівнянь /4.15-4.18/ випливає, що передаточна функція диференціатора залежить віл параметрів регулятора. Із характеристичного рівняння для внутрішнього контура маємо:
 /4.19/
/4.19/
У /4.19/ введемо позначення еквівалентного об’єкта:
 , /4.20/
, /4.20/
Якщо регулятор грунтується на ПІ-законі регулювання, то рівняння /4.19/ з урахуванням /4.14/набирає вигляду
 /4.21/
/4.21/
Із рівняння /4.21/ слідує, що в разі використання ПІ (або ПІД) регулятора з достатньою точністю можна вважати, що параметри диференціатора будуть близькими до параметрів регулятора, тобто  , а
, а  .
.
Розрахунок АСР із додатковим імпульсом за похідною зводиться до такого:
- визначають настроювальні параметри регулятора замкненої одноконтурної системи регулювання без внутрішнього контура;
- використовуючи рівняння /4.21/знаходять параметри диференціатора;
- розраховують перехідний процес АСР і визначають його якість;
- якщо якість не відповідає необхідним вимогам, то потрібно змінити параметри диференціатора.
Дата добавления: 2015-07-30; просмотров: 1315;