АСР непов’язаного регулювання
Розглянемо принцип непов’язаного регулювання на прикладі об’єкта з двома непов’язаними координатами (рис. 4.7,а). Зазначимо, що об’єкти з двома взаємопов’язаними координатами найширше використовують у хімічній технології. Якщо об’єкт має понад дві взаємопов’язані координати, то при автоматизації його поділяють на два або більше об’єктів з двома взаємопов’язаними координатами.
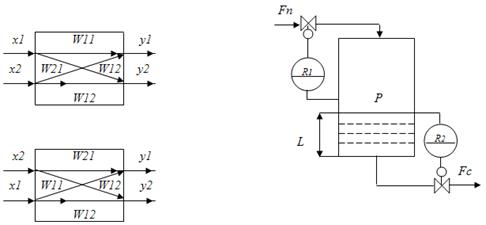
Рис. 4.7. Схеми об’єкта з двома взаємопов’язаними координатами:
а – структурна; б – принципова
Передаточна функція  та
та  створюють перехресні зв’язки між вхідними та вихідними координатами об’єкта. Прикладом такого об’єкта регулювання може бути резервуар з рідиною під тиском. Тиск Р регулюється зміною витрати притоку Fn , а рівень L – зміною витрати стоку Fc. Нехай, згідно із структурною схемою об’єкта Х1 → Fn; Х2→ Fс; y1→ Р; y2→ L.
створюють перехресні зв’язки між вхідними та вихідними координатами об’єкта. Прикладом такого об’єкта регулювання може бути резервуар з рідиною під тиском. Тиск Р регулюється зміною витрати притоку Fn , а рівень L – зміною витрати стоку Fc. Нехай, згідно із структурною схемою об’єкта Х1 → Fn; Х2→ Fс; y1→ Р; y2→ L.
Між тиском Р і витратою Fn існує прямий зв’язок, який описується передаточною функцією  . Між рівнем L і витратами також існує прямий зв’язок, який описується передаточною функцією
. Між рівнем L і витратами також існує прямий зв’язок, який описується передаточною функцією  . Розглянемо перехресні зв’язки. Якщо витрата Fn(Х1) збільшиться, то це призведе до збільшення рівня (y2). З іншого боку, збільшення витрати (Х2) призведе до зниження рівня (y2) і відповідно тиску (y1). Ці взаємозв’язки створюють передаточні функції
. Розглянемо перехресні зв’язки. Якщо витрата Fn(Х1) збільшиться, то це призведе до збільшення рівня (y2). З іншого боку, збільшення витрати (Х2) призведе до зниження рівня (y2) і відповідно тиску (y1). Ці взаємозв’язки створюють передаточні функції  і
і  .
.
Якщо взаємні зв’язки сильніші від основних, то їх необхідно поміняти місцями так, як показано на рис. 4.7.
У разі сильних основних зв’язків будують системи регулювання по каналах відповідно Х1 → y1 і Х2→ y2 (рис. 4.8).
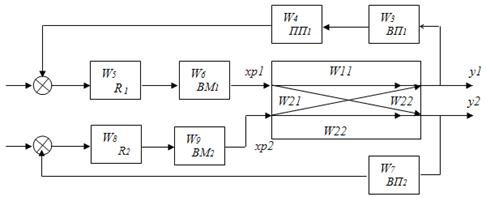
Рис.4.8. Структурна схема АСР непов’язаного регулювання
Зв’язок між системами регулювання відбувається через ОР. Знайдемо передаточну функцію еквівалентного об’єкта в одноконтурній АСР із регулятором R1, структурну схему якого показано на рис. 4.9.
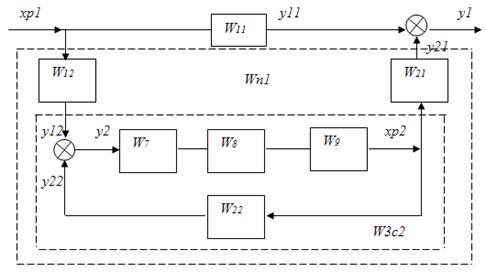
Рис. 4.9. Структурна схема еквівалентного об’єкта регулювання для каналу регулювання Х1 → y1
Із рисунка 4.9. випливає, що, по-перше, еквівалентний об’єкт містить систему регулювання по каналу Х2→ y2 із передаточною функцією  ; по-друге, одержано еквівалентну ланку з передаточною функцією
; по-друге, одержано еквівалентну ланку з передаточною функцією 
 , паралельною основній динамічній ланці з передаточною функцією
, паралельною основній динамічній ланці з передаточною функцією  . Таким чином, передаточна функція еквівалентного об’єкта регулювання має вигляд:
. Таким чином, передаточна функція еквівалентного об’єкта регулювання має вигляд:
 ,
,
 ; /4.25/
; /4.25/
 /4.26/
/4.26/
Дата добавления: 2015-07-30; просмотров: 1220;