Адаптивні та екстримальні системи регулювання
4.6.1 Адаптивні системи регулювання (АСР)
Ми розглядали САК, які розробляються за заданими характеристиками об’єкта, відомими збуреннями і які мають незмінну структуру і параметри. Проте в більшості випадків, під час проектування систем виникають складності, що пов’язані з наявністю неповної інформації про властивості об’єкта та зовнішні збурення.
Вихід з цих ускладнень полягає в розробці регуляторів, властивості яких змінюються так, щоб при змінюванні параметрів об’єкта і зовнішніх дій якість системи зберігалася, тобто властивості регуляторів мають пристосовуватись (адаптуватися) до цих змінювань.
Системи з такими регуляторами називаються адаптивними (самонастроювальними). Отже, адаптивна САК-це система, яка здатна в процесі виконання основної задачі керування за рахунок змінювання параметрів і структури регулятора поповнювати нестачу інформації про об’єкт керування і, діючи на його зовнішні збурення поліпшувати якість свого функціонування.
Якщо вважати час роботи об’єкт інтервал [t0,t1] , то його відповідно можна розділити на підінтервали, протягом яких параметри об'єкта можна вважати незмінними. Для визначення цих інтервалів вводять поняття інтервал квазістаціонарності (Т). Виходячи з того, що параметри об’єкта насправді змінюються і вважаються сталими тільки протягом інтервалу квазістаціонарності, задачу синтезу необхідно розв'язувати в процесі та темпі роботи об'єкта автоматично. Отже алгоритм регулятора повинен змінюватися під час роботи системи, пристосовуючись (адаптуючись, самонастроюючись) протягом часу Т до параметрів об'єкта, що змінюється так щоб якість роботи системи залишалась незмінною. При такому підході до побудови адаптивної системи передусім необхідно розв'язати задачу ідентифікації (визначення) параметрів об'єкта керування. Системи з ідентифікаційним алгоритмом називаються параметрично адаптивними системами.
Іншим видом адаптивних систем є системи, які здійснюють пошук законів змінювання параметрів регулятора, виходячи безпосередньо з цілей керування. При цьому параметри регулятора повинні змінюватись залежно від значення критерію якості роботи системи. Такі алгоритми називаються прямими алгоритмами адаптивного керування, а системи в яких використовуються ці алгоритми називаються функціонально адаптивними системами керування.
Пристрій, що реалізує алгоритм адаптації називають адаптером.
Особливість структури адаптивних систем полягає в тому, що порівняно із звичайними неадаптивними системами вони мають додатковий контур – контур адаптації(самонастроювання), призначений для переробки інформації про умови роботи , що змінюються, і наступної дії на регулятор основного контуру керування.
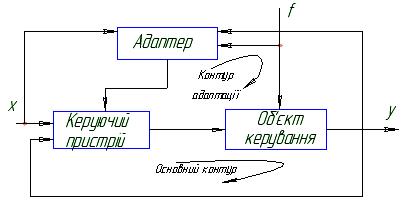
Рис. 4.14 Функціональна схема адаптивної системи
Контур, що складається з керуючого пристрою і об'єкта керування, є основним контуром і становить звичайну неадаптивну САК. Адаптер дістає інформацію про вхідну дію x, збурення f, вихідну величину y і діє на керуючий пристрій основного контуру. Отже, адаптивна САК, крім основного контуру, має контур адаптації. Для цього контуру об'єктом керування є вся основна САК.
Адаптивні системи звичайно поділяють на два класи: параметричні і непараметричні.
У параметричних системах структура керуючого пристрою залишається незмінною, а адаптація здійснюється за рахунок змінювання (підстроювання) значень параметрів з ціллю наближення їх до оптимальної настройки. Такі системи наз. також самонастроювальними.
У непараметричних системах адаптація здійснюється за рахунок змінювання структури (алгоритму функціонування) керуючого пристрою. Такі системи наз. також самоорганізуючими.
Дата добавления: 2015-07-30; просмотров: 1870;