Метод вимірювання похідної
Цей метод ґрунтується на тому, що похідна dI/dU змінює свій знак під час проходження через екстремум. Напрямок руху до екстремуму визначається знаком похідної, а ознакою наявності екстремуму є те що похідна дорівнює нулю.
Для визначення похідної dI/dU використовуються похідні dI/dt і dU/dt, а потім ділиться одна на іншу.
Функціональна схема, яка реалізує метод, коли екстремум забезпечується, шляхом руху об’єкта керування в бік екстремуму показано на рис. 4.17.
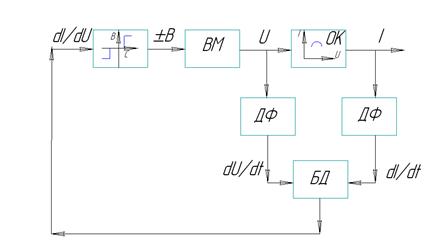
Рис. 4.17 Функціональна схема
Вона складається з двох диференціаторів, блока ділення, що визначає похідну dI/dU і релейного елемента РЕ, що дає знак похідної. Залежно від знака похідної виконавчий механізм ВМ, забезпечує рух об’єкта керування в бік екстремуму. Під час проходження через екстремум знак похідної змінюється, релейний елемент РЕ перемикається і ВМ реверсується, що забезпечує повернення системи до точки екстремуму.
Контрольні запитання:
1. При автоматизації яких об'єктів використовують комбіновані системи регулювання?
2. Принцип інваріантності. Суть цього принципу.
3. Умови фізичної реалізованості інваріантних АСР.
4. В яких випадках фізично неможливо реалізувати «ідеальні» компенсатори?
5. Технічна реалізація інваріантних АСР.
6. Якими елементарними ланками представляють компенсатори?
7. У чому полягає головна перевага каскадного регулювання?
9. Який закон регулювання слід використовувати для допоміжного та основного регулятора при каскадному регулюванні?
10. Яким чином здійснюється розрахунок каскадних АСР?
11. Принцип побудови систем регулювання з додатковим імпульсом за похідною з проміжної точки.
12. Що необхідно для забезпечення регулювання без статичної похибки у системах з додатковим імпульсом за похідною з проміжної точки?
13. Яким чином здійснюється розрахунок АСР із додатковим імпульсом за похідною?
14. Які існують підходи до автоматизації багатопов’язаних об’єктів?
15. Яким чином розраховують АСР, при непов’язаному регулюванні, якщо враховують лише основні канали регулювання?
16. Принцип АСР пов’язаного та непов’язаного регулювання.
17. Яку АСР застосовуєть для регулювання співвідношення матеріальних, або енергетичних потоків?
18. Які АСР називається ще самонастроювальними?
19. Які системи, здатні в процесі виконання основної задачі керування за рахунок змінювання параметрів і структури регулятора поповнювати нестачу інформації про об’єкт керування?
20. За якими ознаками можна класифікувати об'єкти екстримального керування?
Дата добавления: 2015-07-30; просмотров: 1021;