Системи регулювання співвідношення потоків
Такі системи використовують для регулювання співвідношення двох технологічних параметрів, які мають бути пропорційно залежними. Найширше такі системи регулювання застосовують для регулювання співвідношення матеріальних або енергетичних потоків, відношення витрат яких дорівнює сталій величині, яка називається коефіцієнтом співвідношення.
АСР співвідношення можуть бути з одним, двома або трьома регуляторами (рис.4.12). Система регулювання з одним регулятором подібна до комбінованої АСР без динамічного компенсатора (рис.4.12,а). Вона містить замкнену одноконтурну систему регулювання, яка називається веденою і ланку збурення, яка називається ведучою.
Регулятор веденого контуру регулювання називається регулятором співвідношення і ґрунтується на пропорційно-інтегральному законі регулювання. Регулятори інших контурів регулювання можуть ґрунтуватися на інших законах регулювання.
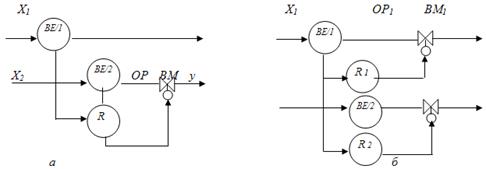
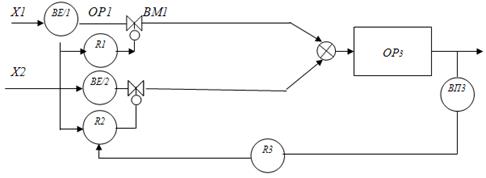
Рис. 4.12.Функціональні схеми АСР співвідношення
Структурну схему АСР співвідношення з одним регулятором показано на рис.4.13, де позначено: R – регулятор; ВП1, ВП2 – вимірювальні перетворювачі; ПП1, ПП2 – проміжні перетворювачі; ВМ – виконавчий механізм.
|
|
X1
 |  |  | |||||
 | |||||||







|
|
|
|
|

 u y
u y
Рис. 4.13. Структурна схема АСР співвідношення з одним регулятором
Передаточна функція АСР по каналу збурення Х1 → y має вигляд:
 /4.30/
/4.30/
Фактично вихідною координатою такої АСР є коефіцієнт співвідношення, який позначимо Кс. Таким чином, у процесі дослідження системи передаточну функцію необхідно знаходити у вигляді 
 . У цьому разі, розглядаючи систему трубопроводів як деякий умовний ОР, доходимо висновку, що вхідною координатою є
. У цьому разі, розглядаючи систему трубопроводів як деякий умовний ОР, доходимо висновку, що вхідною координатою є  , а вихідною -
, а вихідною -  .
.
Знайдемо передаточну функцію АСР по каналу Х2 → y:
 /4.31/
/4.31/
Обчислимо відношення передаточної функції  і
і  :
:
 /4.32/
/4.32/
Рівняння має істотне значення. По-перше, з цього випливає, що динамічні характеристики ОР АСР другого потоку не впливають на динамічні характеристики системи регулювання співвідношень; по-друге, система регулювання по каналу Х1→ Х2 є астатичною при використанні ПІ- або ПІД-регуляторів; по-третє, характер перехідного процесу визначатиметься параметрами регулятора.
Нехай,
 ;
;  ;
;  ;
;  /4.33/
/4.33/
Передаточна функція системи регулювання має вигляд:
 /4.34/
/4.34/
Із рівняння /4.34/ випливає, що при використанні ПІ-регулятора система регулювання завжди буде стійкою. Еквівалентний коефіцієнт передачі системи 
У разі зміни завдання (коефіцієнта співвідношення) регулятора передаточна функція системи по каналу u→ y має вигляд:
 /4.35./
/4.35./
Отже, АСР необхідно досліджувати по каналу Х1→ Х2 для визначення якості регулювання у разі зміни збурюючого параметра, а також по каналу u→ y для визначення якості регулювання у разі завдання.
Дата добавления: 2015-07-30; просмотров: 1402;