Системи екстремального регулювання (ЕСР)
Системою екстремального керування називається система, в якій автоматично відшукується та підтримується режим роботи, що характеризується максимально (мінімально) можливим значенням показника якості. Цей показник називається також показником екстремуму або цільовою функцією. В загально випадку в процесі екстримального керування визначається екстремум статичної характеристики нелінійного нестаціонарного інерційного об'єкта, на який діють збурення, що змінюють положення екстремуму в просторі керуючих дій.
Якщо статична характеристика об'єкта має екстремум:
I=f(U1,U2,…Um), /4.36/
де І-показник екстремуму, ui-керуючі параметри, то система екстримального керування має виводити й утримувати робочу точку в екстремумі.
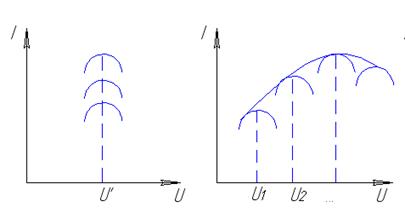
а б
Рис. 4.15 Статична характеристика об’єкта: а) значення керуючого параметра U=U´ при якому досягається екстремум є фіксованим; б) координати екстремуму змінюються у часі.
Об'єкти екстримального керування можна класифікувати за такими ознаками:
- Кількість керуючих (оптимізуючи) параметрів;
- Кількість екстремумів характеристики об'єкта;
- Обсяг інформації про об'єкт;
- Інерційність об'єкта.
Якщо в об’єкті всього один керуючий параметр (m=1) та об’єкт називається однопараметричним; якщо m>1 то об'єкт багатопараметричний.
В найпростішому випадку об’єкт екстремального клерування є однопараметричним, одно екстремальним а його статична характеристика (рис.1) безперервно-диференційованою функцією. Головним у системах екстремального керування є відслідковування дрейфу екстремуму статичної характеристики об’єкту, тому екстремальні системи часто називають санастроювальними системами.
Прикладом екстремального об’єкту може бути котел теплових електричних станцій. В топку котла подається повітря кількість якого дещо перевищує ту кількість яка теоретично необхідна для повного згорання палива. Відношення цих кількостей називається коефіцієнтом надлишку повітря aн. Правильність вибору цього коефіцієнту визначає економічність використання палива. Основним збуренням для котла є змінювання споживання пари. Залежність ККД котла h від коефіцієнта надлишку повітря aн мають екстремуми для різних витрат пари F (рис. 4.16). Завданням систем екстремального керування є зміна подачі повітря в топку таким чином щоб ККД котла мав би максимально можливе в даних умовах значення.
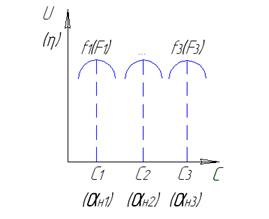
Рис. 4.16. Залежність ККД котла h від
коефіцієнта надлишку повітря aн.
Є різні методи (принципи) пошуків екстремумів, такі як : метод вимірювання похідної, метод градієнта, метод найбільш швидкого спуску, метод випадкових пошуків, метод Гаусса –Зейделля, та інші.
Якщо значення керуючого параметра U=U’, при якому досягається екстремум є фіксованим, тобто відбувається лише вертикальний дрейф статичної характеристики, або знаходиться за заздалегідь відомим законом, то можна застосовувати систему стабілізації, або систему програмного керування.
Якщо крім вертикального дрейфу відбувається і горизонтальний, причому закон цього дрейфу заздалегідь невідомий, то системи стабілізації, або програмного керування не можуть забезпечити автоматичне утримання екстремуму. В цьому випадку слід застосовувати систему екстремального керування. Ця система забезпечує такі зміни керуючого параметра, при яких відбувається рух системи до екстремуму і утримання її в точці екстремуму.
Дата добавления: 2015-07-30; просмотров: 1139;