Каскадні системи регулювання
Якість роботи системи регулювання визначається властивостями об’єкта, характеристиками регулятора, а також точкою прикладання та величиною збурення. Іноді якість простої одноконтурної системи регулювання можна істотно підвищити за допомогою порівняно незначних удосконалень, таких як зменшення запізнення або однієї з менших сталих часу, використання позиціонера для покращення роботи виконавчого механізму, уведення в регулятор додаткового впливу за похідною (диференціальну складову). Якщо після цього якість системи регулювання залишається незадовільною, то необхідно розглянути можливість використання складніших систем регулювання.
Однин із шляхів покращення роботи системи полягає у використанні додаткових регуляторів. Найкращим способом використання відхилень вихідної координати є побудова схеми каскадного регулятора. Вихід основного (зовнішнього) регулятора використовується для формування та зміни завдання допоміжного (внутрішнього) регулятора, який безпосередньо діє на виконавчий механізм регулюючого органу. Головна перевага каскадного регулювання полягає в поліпшенні якості роботи системи при будь-яких збуреннях за навантаженістю, а також при великій інерційності об’єкта за каналом регулювання. Якщо збурення прикладені до входу об’єкта, то допоміжний регулятор починає виконувати регулюючий вплив ще до того, як на виході системи з’явиться яке-небудь відхилення; похибка при цьому може бути зменшена до 10-100 разів порівняно з одноконтурним регулюванням.
Каскадні АСР широко використовують для регулювання технологічних процесів, наприклад, температури, рівня, концентрації. У більшості випадків внутрішнім є контури стабілізації витрати матеріального чи енергетичного потоку.
Каскадні АСР належать до багатоконтурних систем регулювання. Найчастіше використовують дво- або триконтурні системи регулювання. На рис. 4.4. показано структурну схему двоконтурної каскадної системи регулювання:
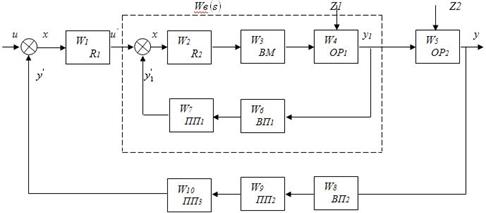
Рис. 4.4. Структурна схема каскадної АСР
Внутрішній контур складається з регулятора R2, який є допоміжним, BM, об’єкта регулювання OP1, перетворювачів вимірювального ВП1 та проміжного ПП1. Задання  для регулятора R2 формуються основним регулятором R1 зовнішнього контура (коректуючого), який складається з вимірювального ВП2 та проміжних ПП2 і ПП3 перетворювачів.
для регулятора R2 формуються основним регулятором R1 зовнішнього контура (коректуючого), який складається з вимірювального ВП2 та проміжних ПП2 і ПП3 перетворювачів.
Закони регулювання вибирають залежно від призначення регуляторів. Для підтримання основної координати на заданому значенні без статичної помилки закон регулювання основного регулятора має містити інтегральну складову, тобто, слід використовувати регулятор ПІ або ПІД. Від допоміжного регулятора потрібна, насамперед, швидкодія, тому він може мати будь-який закон регулювання, навіть пропорційний як найпростіший і достатньо швидкодіючий.
Якщо внутрішній контур каскадної АСР позначити  , то формально одержимо одноконтурну систему регулювання з передаточною функцією по каналу регулювання:
, то формально одержимо одноконтурну систему регулювання з передаточною функцією по каналу регулювання:
W3р(s)=  , /4.10/
, /4.10/
а по каналу  → Y:
→ Y:
 (s)=
(s)=  , /4.11/
, /4.11/
де передаточна функція внутрішнього контура по каналу регулювання:
 (s)=
(s)=  , /4.12/
, /4.12/
а по каналу  :
:
 (s)=
(s)=  , /4.13/
, /4.13/
де  =
=  ;
;  =
= 
 - передаточні функції об’єктів по каналах збурення, які містять також ланку чистого запізнення.
- передаточні функції об’єктів по каналах збурення, які містять також ланку чистого запізнення.
Розрахунок каскадних АСР передбачає запізнення настроювань регуляторів (основного та допоміжного) при заданих динамічних характеристиках об’єктів OP1 та OP2, а також виконавчого механізму, вимірювальних перетворювачів та інших засобів автоматизації. Оскільки настроювання основного та допоміжного регуляторів взаємопов’язані, їх розрахунки виконують методом ітерацій. Спочатку треба визначити параметри настроювання внутрішнього регулятора. Для цього необхідно розімкнути зовнішній контур на вході вимірювального перетворювача ВП2 і визначити параметри настроювання регулятора R2 як для одноконтурної АСР. У розрахунку настроювань регулятора R1 внутрішній контур замінюють еквівалентною передаточною функцією  (показано пунктиром на рис.3.9). У цьому разі каскадна АСР перетворюється на одноконтурну, для якої знаходять параметри настроювання регулятора R1. Потім розрахунок продовжують у такій послідовності:
(показано пунктиром на рис.3.9). У цьому разі каскадна АСР перетворюється на одноконтурну, для якої знаходять параметри настроювання регулятора R1. Потім розрахунок продовжують у такій послідовності:
- розраховують перехідний процес каскадної АСР і визначають параметри його якості;
- у разі незадовільної якості перехідного процесу змінюють у той чи інший бік настроювання регулятора R2;
- знову розраховують перехідний процес і визначають його якість;
- якщо якість перехідного процесу не задовільняє вимоги, то знову змінюють настроювання регулятора R1 і так доти, доки якість перехідного процесу не відповідатиме певним вимогам.
У розрахунку каскадної АСР необхідно враховувати, що система регулювання в цілому може бути стійкою навіть у разі нестійкого внутрішнього контура. Але такого стану слід уникати, через те, що зовнішній контур іноді переводять на ручне керування. Для внутрішнього контура найдоцільніше використовувати П-регулятор з високим коефіцієнтом передачі. Невелика залишкова нерівномірність у разі зміни навантаження в результаті компенсується основним регулятором. Інтегральна складова у внутрішньому контурі виправдана, якщо внутрішній контур має невеликий коефіцієнт підсилення, що часто має місце при регулюванні витрат.
У процесі розробки каскадної системи потрібно намагатися уникати нелінійностей, які виникають у результаті великих сигналів у внутрішньому контурі. При дуже великому коефіцієнті підсилення регулятора R2 зміна якогось збурення або керуючого сигналу від основного регулятора спричиняє перенасичення допоміжного регулятора, що призводить до переміщення регулюючого органу в крайнє положення. Іноді система при цьому залишається стійкою, але перехідні процеси в ній гірші, ніж в одноконтурних АСР.
Дата добавления: 2015-07-30; просмотров: 1843;