Натуральна система координат
На просторовій кривій  , яка є траєкторією руху точки, розглянемо два близькі положення точки
, яка є траєкторією руху точки, розглянемо два близькі положення точки  (рис. 91, а).
(рис. 91, а).
Проведемо в цих точках дотичні до кривої, орти яких позначимо відповідно  і
і  . Перенесемо вектор паралельно самому собі в точку
. Перенесемо вектор паралельно самому собі в точку  і через вектори і
і через вектори і  проведемо площину. Граничне положення цієї площини при наближенні точки
проведемо площину. Граничне положення цієї площини при наближенні точки  до точки називається стичною площиною (площина І). Через точку , перпендикулярну до дотичної , проведемо площину, яка називається нормальною площиною (площина ІІ на рис. 91, а). Очевидно, що будь-яка пряма, проведена в цій площині через точку , буде перпендикулярна до
до точки називається стичною площиною (площина І). Через точку , перпендикулярну до дотичної , проведемо площину, яка називається нормальною площиною (площина ІІ на рис. 91, а). Очевидно, що будь-яка пряма, проведена в цій площині через точку , буде перпендикулярна до  , тобто буде нормаллю кривої.
, тобто буде нормаллю кривої.
Ліня перетину стичної і нормальної площин називається головною нормаллю кривої. Площина, проведена через точку перпендикулярно до головної нормалі, називається спрямною площиною (площина ІІІ на рис. 91, а). Лінія перетину спрямної і нормальної площин називається бінормаллю кривої. Стична, нормальна і спрямна площини утворюють натуральний тригранник.
Рис. 91
Таким чином, в кожній точці кривої можна провести три взаємно перпендикулярні напрями і прийняти їх за координатні осі: дотичну, напрямлену в бік зростання дугової координати; головну нормаль, напрямлену в бік вгнутості кривої, і бінормаль, напрямлену перпендикулярно до дотичної і головної нормалі так, щоб утворити з ними праву систему осей (рис. 91, а). Якщо поміняти напрям додатного відрахунку на кривій, то поміняють свій напрям дотична вісь і бінормаль (рис. 91, б).
Орти цих осей позначають 
Осі дотична, головна нормаль і бінормаль утворюють натуральну систему координат з початком в рухомій точці, а отже, і рухаються разом з нею, залишаючись взаємно перпендикулярними.
§ 40 Натуральний спосіб вивчення руху точки
В даному способі задання руху точки на відміну від попередніх вказується траєкторія, по якій рухається точка. Припустимо, що точка рухається по деякій траєкторії  (рис. 92). На заданій траєкторії вибираємо деяку нерухому точку
(рис. 92). На заданій траєкторії вибираємо деяку нерухому точку  , відносно якої будемо визначати положення рухомої точки . Саме положення точки визначається дугою
, відносно якої будемо визначати положення рухомої точки . Саме положення точки визначається дугою  , яка найчастіше позначається буквою
, яка найчастіше позначається буквою  і називається дуговою координатою. Отже, нерухома точка є початком відліку дугової координати. В один бік відліку дугова координата вважається додатною, в протилежний бік – від’ємною. Вибір додатного напряму відліку дугової координати є довільним.
і називається дуговою координатою. Отже, нерухома точка є початком відліку дугової координати. В один бік відліку дугова координата вважається додатною, в протилежний бік – від’ємною. Вибір додатного напряму відліку дугової координати є довільним.
 При русі точки її дугова координата неперервно змінюється з часом, тобто є функцією часу
При русі точки її дугова координата неперервно змінюється з часом, тобто є функцією часу
 (2.17)
(2.17)
Записане рівняння, яке дає змогу визначити положення рухомої точки на траєкторії в будь-який момент часу, називається рівнянням (законом) руху точки по траєкторії. Очевидно, як і попередніх випадках, функція  повинна бути однозначною і неперервною разом із своїми похідними.
повинна бути однозначною і неперервною разом із своїми похідними.
Тут треба зауважити, що дугова координата точки і шлях, пройдений точкою, який також часто позначається буквою , в загальному випадку відрізняються. І дійсно, якщо припустити, що за проміжок часу  точка переміститься з положення в положення і повернеться в положення (рис. 92), то в момент часу
точка переміститься з положення в положення і повернеться в положення (рис. 92), то в момент часу  дугова координата точки буде , а шлях, пройдений точкою (позначимо його буквою
дугова координата точки буде , а шлях, пройдений точкою (позначимо його буквою  ), буде дорівнювати сумі довжин двох дуг:
), буде дорівнювати сумі довжин двох дуг:  . До того ж дугова координата точки може бути як додатною, так і від’ємною, а шлях, який проходить точка, є завжди додатним.
. До того ж дугова координата точки може бути як додатною, так і від’ємною, а шлях, який проходить точка, є завжди додатним.
Швидкість точки визначимо за формулою (2.2)
 (а)
(а)
Оскільки кожному значенню координати відповідає певне значення радіуса-вектора  (див. рис. 92), то можна вважати, що радіус-вектор є неперервною функцією
(див. рис. 92), то можна вважати, що радіус-вектор є неперервною функцією  , і формулу (а) можна записати так:
, і формулу (а) можна записати так:
 (б)
(б)
(Відомості з математики. В математиці похідна  позначається вектором і доводиться, що величина вектора дорівнює одиниці, і цей вектор напрямлений по дотичній до лінії в бік зростання дугової координати, тобто вектор є ортом дотичної. Отже,
позначається вектором і доводиться, що величина вектора дорівнює одиниці, і цей вектор напрямлений по дотичній до лінії в бік зростання дугової координати, тобто вектор є ортом дотичної. Отже,  , де – орт дотичної).
, де – орт дотичної).
Враховуючи це, формула (б) набуває вигляду
 (2.18)
(2.18)
Формула (2.18) визначає вектор швидкості точки у випадку, коли рух її задано натуральним способом, тобто відома траєкторія точки і закон її руху по траєкторії (рівн. 2.17).
Аналізуючи отриману формулу, можна зробити такі висновки:
1. Якщо  то вектор швидкості співпадає з напрямом вектора . Якщо
то вектор швидкості співпадає з напрямом вектора . Якщо  , то вектор швидкості протилежний до напряму вектора (рис. 93). В першому і другому випадках вектор швидкості буде дотичним до траєкторії.
, то вектор швидкості протилежний до напряму вектора (рис. 93). В першому і другому випадках вектор швидкості буде дотичним до траєкторії.
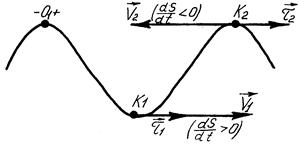
Рис. 93
Отже, вектор швидкості точки в кожному її положенні є дотичним до траєкторії.
2. Вектор швидкості дорівнює добутку одиничного вектора на вираз  . Згідно з поняттями векторної алгебри цей вираз визначає проекцію вектора швидкості на дотичну вісь і називається алгебраїчноюшвидкістю точки, тобто
. Згідно з поняттями векторної алгебри цей вираз визначає проекцію вектора швидкості на дотичну вісь і називається алгебраїчноюшвидкістю точки, тобто
 (2.19)
(2.19)
Алгебраїчна швидкість точки дорівнює першій похідній за часом від дугової координати.
Величина (модуль) швидкості при натуральному способі задання руху дорівнює

Оскільки пришвидшення точки – це перша похідна за ча-сом від її вектора швидкості, то в нашому випадку отримаємо
Вектор є змінним вектором, бо при русі точки змінюється його напрям. Отже, похідну треба брати від добутку.
 (а)
(а)
Якщо врахувати, що орт змінює свій напрям при зміні дугової координати , тобто він є функцією дугової координати  то
то

і співвідношення (в) набуває вигляду
 (г)
(г)
(Відомості з математики.В математиці похідна  позначається вектором
позначається вектором  , який називається вектором кривизни. Вектор кривизни напрямляється по напряму головної нормалі і дорівнює
, який називається вектором кривизни. Вектор кривизни напрямляється по напряму головної нормалі і дорівнює  , де
, де  – радіус кривизни лінії. Отже,
– радіус кривизни лінії. Отже,
 .
.
Враховуючи це і формулу (2.19), отримуємо, що
 (2.20)
(2.20)
Пришвидшення точки дорівнює геометричній сумі двох доданків.
Векторна складова  напрямлена по головній нормалі, на що вказує вектор
напрямлена по головній нормалі, на що вказує вектор  – орт головної нормалі, познача-ється
– орт головної нормалі, познача-ється  і називається вектором нормального пришвидшення
і називається вектором нормального пришвидшення
 (2.21)
(2.21)
Скалярний співмножник при орті , очевидно, визначає проекцію нормального пришвидшення на головну нормаль
 (2.22)
(2.22)
Векторна складова  , яка напрямлена по дотичній, на що вказує вектор – орт дотичної, позначається
, яка напрямлена по дотичній, на що вказує вектор – орт дотичної, позначається  і назива-ється вектором тангенціального (дотичного) пришвидшення
і назива-ється вектором тангенціального (дотичного) пришвидшення
 (2.23)
(2.23)
Скалярний співмножник при орті , очевидно, визначає проекцію тангенціального пришвидшення на дотичну вісь
 (2.24)
(2.24)
Нормальне пришвидшення характеризує зміну вектора швидкості за напрямом. Величина цього пришвидшення визначається за формулою (2.22), а його вектор завжди напрямлений по головній нормалі в бік вгнутості траєкторії (рис. 94).
Дотичне пришвидшення характеризує зміну вектора швидкості за величиною. Алгебраїчна величина цього пришвидшення визначається за формулою (2.24), а його вектор напрямлений по вектору при  і в протилежний бік при
і в протилежний бік при  (рис. 94).
(рис. 94).
Рис. 94
Підставляючи формули (2.21), (2.23) в (2.20), отримаємо
 . (2.25)
. (2.25)
Пришвидшення точки дорівнює геометричній сумі її нормального і тангенціального пришвидшень.
Оскільки орти і взаємно перпендикулярні, то вектор нормального пришвидшення , буде перпендикулярним до вектора тангенціального пришвидшення  , і модуль повного пришвидшення буде визначатися за теоремою Піфагора
, і модуль повного пришвидшення буде визначатися за теоремою Піфагора
 . (2.26)
. (2.26)
Формули (2.21)-(2.26) визначають вектор пришвидшення точки у випадку, коли рух її задано натуральним способом, тобто відома траєкторія, по якій рухається точка і закон її руху по траєкторії (рів. 2.17).
З рис. 94 можна зробити такі висновки:
1. Вектор пришвидшення точки знаходиться в стичній площині.
2. Проекція вектора пришвидшення точки на бінормаль завжди дорівнює нулеві, тобто 
3. Кут, який утворює вектор пришвидшення точки з дотичною до траєкторії, можна визначити з формули
 . (2.27)
. (2.27)
§ 41 Класифікація руху точки за її пришвидшеннями
Класифікувати рух точки можна по-різному. Наприклад, за траєкторією розрізняють прямолінійний і криволінійний рух. За швидкостями розрізняють рівномірний, рівнозмінний і змінний рухи.
Найбільш загальною класифікацією руху точки, яка охоплює і згадані класифікації, є класифікація за її пришвидшеннями. Як було показано, в загальному випадку пришвидшення точки визначаються за формулою

Розглянемо часткові випадки:
1. При русі точки її нормальне пришвидшення дорівнює нулеві, тобто  З формулою (2.22) отримуємо
З формулою (2.22) отримуємо
 .
.
Оскільки точка рухається, то  а це означає, що
а це означає, що  Тільки для прямої радіус кривизни дорівнює нескінченності, отже в цьому випадку, точка рухається прямолінійно. Оскільки при прямолінійному русі швидкість точки не змінюється за напрямом, то можна констатувати, що нормальне пришвидшення точки вказує на зміну вектора швидкості за напрямом.
Тільки для прямої радіус кривизни дорівнює нескінченності, отже в цьому випадку, точка рухається прямолінійно. Оскільки при прямолінійному русі швидкість точки не змінюється за напрямом, то можна констатувати, що нормальне пришвидшення точки вказує на зміну вектора швидкості за напрямом.
2. Очевидно, якщо нормальне пришвидшення точки не дорівнює нулеві (  ), то точка буде рухатись по криволінійній траєкторії.
), то точка буде рухатись по криволінійній траєкторії.
3. При русі точки її тангенціальне пришвидшення дорівнює нулеві, тобто  Оскільки
Оскільки

то отримуємо, що

тобто  і
і  .
.
Рух з постійною за модулем швидкістю називається рівномірним. Отже, в даному випадку маємо рівномірний рух. Використовуючи формулу (2.19), знайдемо закон цього руху
Звідки 
Інтегруючи і враховуючи, що 

отримаємо закон рівномірного руху точки
 , (2.28)
, (2.28)
в якому  – початкова дугова координата, тобто значення дугової координати в момент часу
– початкова дугова координата, тобто значення дугової координати в момент часу 
Якщо рух відбувається в додатному напрямі відліку дугової координати, то  , і закон рівномірного руху набуває вигляду
, і закон рівномірного руху набуває вигляду
 ;
;
коли рух відбувається у від’ємному напрямі відрахування дугової координати, то  , і закон рівномірного руху набуває вигляду
, і закон рівномірного руху набуває вигляду

де  – модуль сталої швидкості.
– модуль сталої швидкості.
Зазначимо, що тут нічого не сказано про нормальне пришвидшення. Отже, воно може бути довільним, тобто точка може рухатись як прямолінійно, так і по криволінійній траєкторії. В останньому випадку за рахунок нормального пришвидшення точка матиме пришвидшення. Отже при рівномірному русі точка може мати пришвидшення. До того ж зауважимо, якщо швидкість точки не змінюється за величиною ( ), то її тангенціальне пришвидшення дорівнює нулеві, таким чином, тангенціальне пришвидшення точки вказує на зміну вектор швидкості за величиною.
4. Тангенціальне пришвидшення точки не дорівнює нулеві, але воно є сталим, тобто 
Рух з постійним тангенціальним пришвидшенням називається рівнозмінним.
Отже, при рівномірному русі
Інтегруючи  , отримаємо закон зміни алгебра-їчної швидкості при рівнозмінному русі
, отримаємо закон зміни алгебра-їчної швидкості при рівнозмінному русі
 , (2.29)
, (2.29)
в якому  – початкова швидкість точки.
– початкова швидкість точки.
Оскільки  , то формулу (2.29) можна записати
, то формулу (2.29) можна записати

звідки, інтегруючи, отримуємо закон (рівняння) рівнозмінного руху точки
 , (2.30)
, (2.30)
в якому – початкова дугова координата точки.
Питання для самоконтролю
1. Що таке “кінематика”?
2. Назвіть основні кінематичні характеристики руху точки.
3. Які рухи може здійснювати точка?
4. Якими способами можна задати рух точки?
5. Запишіть рівняння руху точки у векторній формі.
6. Запишіть рівняння руху точки в декартовій системі координат.
7. Запишіть закон руху точки по траєкторії.
8. Рух точки визначається рівняннями 
 Знайти рівняння траєкторії.
Знайти рівняння траєкторії.
9. Точка рухається по колу радіусом 2 м з постійною швидкістю  м/с. Яким способом задано рух точки?
м/с. Яким способом задано рух точки?
10. Радіус-вектор точки змінюється за законом  . Запишіть рівняння руху точки в координатній формі.
. Запишіть рівняння руху точки в координатній формі.
11. Рух точки задано рівняннями  ,
,  . Знайдіть швидкість точки, якщо
. Знайдіть швидкість точки, якщо  ,
,  .
.
12. Визначити пришвидшення точки, рух якої описується рівняннями  м,
м,  м.
м.
13. Які координати осі називаються натуральними?
14. Як називаються і за якою формулою визначається проекція пришвидшення на головну нормаль?
15. Як називається і за якою формулою визначається проекція пришвидшення на головну нормаль?
16. Чому дорівнює проекція пришвидшення на бінормаль?
17. Як рухається точка, якщо:
а)  ;
;  ;
;
б)  ; ;
; ;
в) ;  .
.
18. Який рух точки називається рівномірним?
19. Чи може мати пришвидшення точка при рівномірному русі?
20. Запишіть рівняння рівнозмінного руху точки.
2.2 Кінематика твердого тіла
Тверде тіло, як і точка, може здійснювати як простий, так і складний рухи. До простих видів руху тіла відносяться поступальний рух твердого тіла і обертання твердого тіла навколо нерухомої осі. Ці рухи твердого тіла не можна звести ще до простіших видів руху, і тому є найпростішими видами руху твердого тіла. Всі інші види руху тіл, які спостерігаються в природі і техніці, є складними, бо, як буде показано в наступних розділах, вони складаються з найпростіших видів руху.
При вивченні кінематики як простих, так і складних видів руху твердого тіла розв’язуються дві задачі. З самого початку визначають кінематичні характеристики руху тіла як цілого об’єкта. Отримавши відповідні формули і співвідношення, приступають до визначення кінематичних характеристик руху окремої його точки. Отже, в кінематиці твердого тіла є формули, які визначають кінематичні характеристики руху тіла, і формули, які визначають кінематичні характеристики руху окремої його точки.
При русі твердого тіла радіуси-вектори двох його точок в кожний момент часу задовольняють таке співвідношення (рис. 95):


Продиференціювавши цю залежність за часом, отримаємо
 (2.31)
(2.31)
Отримана формула відображає залежність між швидкостями двох точок тіла в будь-якому його русі. Необхідно пам’ятати, що в цій формулі вектор  може змінюватись тільки за напрямом. Його величина
може змінюватись тільки за напрямом. Його величина  бо він з’єднує дві точки твердого тіла.
бо він з’єднує дві точки твердого тіла.
Якщо з рівності (2.31) взяти ще одну похідну за часом, то отримаємо залежність між пришвидшеннями двох точок тіла
 . (2.32)
. (2.32)
§ 42 Поступальний рух твердого тіла
Поступальним рухом твердого тіла називається такий його рух, при якому будь-яка пряма, що проведена в тілі, залишається паралельною до свого початкового положення.
Найпростішими прикладами поступального руху тіла є:
1. Рух поршня в автомобільному двигуні.
2. Рух стола поздовжньо-стругального верстата.
3. Рух спарника паровозних коліс (рис. 96).
 Не треба ототожнювати поступальний рух твердого тіла з прямолінійним рухом. При прямолінійному русі всі точки тіла рухаються по прямій лінії, а при поступальному русі траєкторією точки може бути будь-яка крива.
Не треба ототожнювати поступальний рух твердого тіла з прямолінійним рухом. При прямолінійному русі всі точки тіла рухаються по прямій лінії, а при поступальному русі траєкторією точки може бути будь-яка крива.
Нехай тіло (рис. 97) здійснює поступальний рух. Візьмемо дві довільні його точки  і
і  і позначимо:
і позначимо:
 – радіус-вектор точки ;
– радіус-вектор точки ;
 – радіус-вектор точки ;
– радіус-вектор точки ;
 – радіус-вектор точки відносно точки .
– радіус-вектор точки відносно точки .
Оскільки тіло здійснює поступальний рух  , то вектор
, то вектор  не змінює свого напряму, тобто
не змінює свого напряму, тобто  . Тоді формула (2.31) набуває вигляду
. Тоді формула (2.31) набуває вигляду
 , (а)
, (а)
тобто
 . (б)
. (б)
Отже,
при поступальному русі твердого тіла швидкості його точок геометрично рівні.
Проінтегрувавши векторну рівність (а), отримаємо
 (в)
(в)
З отриманої векторної рівності бачимо, що положення точки в будь-який момент часу можна отримати шляхом зміщення точки на постійний вектор. Отже, траєкторія точки однакова з траєкторією точки , тільки зміщена на постійний вектор.
Диференціюючи рівність (б) за часом, отримаємо

або
 (г)
(г)
тобто:
при поступальному русі твердого тіла пришвидшення його точок геометрично рівні.
Враховуючи отримане, можна сформулювати таку
теорему:
при поступальному русі тіла всі його точки описують однакові траєкторії і в кожний момент часу ма-ють геометрично рівні швидкості і пришвидшення.
А це означає, що поступальний рух твердого тіла визначається рухом окремої його точки.
Ця обставина уможливлює вивчення поступального руху тіла звести до вивчення руху однієї з його точок, тобто до задачі кінематики точки, яка розглянута вище. Наприклад, якщо необхідно записати рівняння поступального руху твердого тіла, то записують рівняння руху якої-небудь його точки
 ,
,  ,
,  . (2.33)
. (2.33)
Рівняння (2.33) за умови, що точка належить тілу, яке здійснює поступальний рух, називається рівнянням поступального руху твердого тіла. Як буде показано в наступному розділі теоретичної механіки, найефективніше такою точкою вибирати центр мас тіла.
§ 43 Обертання твердого тіла навколо нерухомої осі
 Розглянемо тверде тіло, яке здійснює такий рух, при якому дві його точки (наприклад, точки і ) є нерухомими
Розглянемо тверде тіло, яке здійснює такий рух, при якому дві його точки (наприклад, точки і ) є нерухомими  (рис. 98).
(рис. 98).
Тоді з формули (2.31)
отримуємо, що  тобто
тобто
 .
.
Виберемо тепер на прямій  довільну точку
довільну точку  , для якої вектор
, для якої вектор  , де
, де  – деяке число. За формулою (2.31) визначимо швидкість точки
– деяке число. За формулою (2.31) визначимо швидкість точки
 , або
, або
Оскільки  ,
,  – число, то отримуємо, що
– число, то отримуємо, що  . Точка на прямій вибрана довільно, а це означає, що пряма є геометричне місце точок, швидкості яких дорівнюють нулеві, тобто є віссю обертання.
. Точка на прямій вибрана довільно, а це означає, що пряма є геометричне місце точок, швидкості яких дорівнюють нулеві, тобто є віссю обертання.
Отже,
обертанням твердого тіла навколо нерухомої осі називається такий його рух, при якому хоча б дві точки тіла є нерухомими.
Вісь обертання в подальшому будемо позначати буквою  Точки тіла, які не належать осі обертання (наприклад, точка
Точки тіла, які не належать осі обертання (наприклад, точка  і
і  (рис. 99), очевидно, рухатимуться по колах, площини яких перпендикулярні до осі обертання, а центри їх знаходяться на осі обертання. Радіуси цих кіл
(рис. 99), очевидно, рухатимуться по колах, площини яких перпендикулярні до осі обертання, а центри їх знаходяться на осі обертання. Радіуси цих кіл  і
і  визначають відстані відповідних точок до осі обертання.
визначають відстані відповідних точок до осі обертання.
§ 43.1 Рівняння обертання тіла навколо нерухомої осі
Розглянемо тверде тіло, яке обертається навколо нерухомої осі (рис. 100). Для визначення положення тіла через вісь обертання проведемо дві півплощини: нерухому  і рухому
і рухому  , яка жорстко з’єднана з тілом, тобто положення і рух її
, яка жорстко з’єднана з тілом, тобто положення і рух її  визначаються положенням і рухом тіла і навпаки. Ліній-ний кут двогранного кута між півплощинами і позначимо
визначаються положенням і рухом тіла і навпаки. Ліній-ний кут двогранного кута між півплощинами і позначимо  . Заданням цього кута цілком визнача-ється положення рухомої півплощини , а разом з тим і положення тіла. Кут j називається кутом повороту тіла. Під час обертання тіла кут повороту змінюється з часом, тобто є деякою функцією часу
. Заданням цього кута цілком визнача-ється положення рухомої півплощини , а разом з тим і положення тіла. Кут j називається кутом повороту тіла. Під час обертання тіла кут повороту змінюється з часом, тобто є деякою функцією часу 
 (2.34)
(2.34)
Записане рівняння називається рівнянням (законом) обертання твердого тіла навколо нерухомої осі, бо, знаючи це рівняння, можна визначати положення тіла в будь-який момент часу.
Кут повороту вимірюється в радіанах і вважається додатним, якщо він відкладається проти ходу годинникової стрілки, коли дивитися з кінця осі обертання.
Перша похідна за часом від кута повороту називається алгебраїчною кутовою швидкістю.
Вона позначається буквою  (омега)
(омега)
 (2.35)
(2.35)
Перша похідна за часом від алгебраїчної кутової швид-кості називається алгебраїчним кутовим пришвидшенням.
Кутове пришвидшення позначається буквою  (епсилон).
(епсилон).
 (2.36)
(2.36)
Модулі алгебраїчної кутової швидкості і кутового пришвидшення позначаються  ,
,  і будемо називати їх просто кутовою швидкістю і кутовим пришвид-шенням. На рисунках алгебраїчну кутову швидкість і кутове пришвидшення показують дуговими стрілками, додатний напрям яких вибирають проти ходу годинникової стрілки, якщо дивитись з кінця осі обертання.
і будемо називати їх просто кутовою швидкістю і кутовим пришвид-шенням. На рисунках алгебраїчну кутову швидкість і кутове пришвидшення показують дуговими стрілками, додатний напрям яких вибирають проти ходу годинникової стрілки, якщо дивитись з кінця осі обертання.
Кут повороту , кутова швидкість і кутове пришвид-шення є кінематичними характеристиками обертання твердого тіла навколо нерухомої осі.
З’ясуємо одиниці вимірювання цих величин. В теоретичній механіці, як і у фізиці та в більшості інших дисциплін, кут повороту найчастіше вимірюється в радіанах (рад), тобто:

Тоді згідно з формулою (2.35) кутова швидкість буде вимірюватись в рад/с, тобто:

а кутове пришвидшення

У техніці кут повороту тіла визначають в обертах. Кількість обертів найчастіше позначають буквою  . Оскільки за один оберт тіло повертається на
. Оскільки за один оберт тіло повертається на  радіан, то за обертів воно повертається на кут
радіан, то за обертів воно повертається на кут
 рад. (2.37)
рад. (2.37)
Кутову швидкість у техніці часто характеризують числом обертів за хвилину (об/хв) і позначають буквою  . В паспортах кожного двигуна внутрішнього згоряння, електродвигуна вказане експлуатаційне число обертів за хвилину. Зв’язок між
. В паспортах кожного двигуна внутрішнього згоряння, електродвигуна вказане експлуатаційне число обертів за хвилину. Зв’язок між  і визначається формулою
і визначається формулою

тобто
 (2.38)
(2.38)
Залежність (2.38) – це формула переходу від кутової швидкості в обертах за хвилину до кутової швидкості в радіанах за секунду. Цю формулу бажано запам’ятати, бо вона часто застосовується в реальних розрахунках і не треба її плутати з формулою
 , (2.39)
, (2.39)
де  – частота обертання тіла, тобто кількість обертів тіла за одну секунду, яка також часто зустрічається в технічній літературі.
– частота обертання тіла, тобто кількість обертів тіла за одну секунду, яка також часто зустрічається в технічній літературі.
§ 43.2 Рівняння рівномірного і рівнозмінного обертання
Обертання з постійною кутовою швидкістю називається рівномірним.
Отже, для рівномірного обертання  Оскільки за формулою (2.35)
Оскільки за формулою (2.35)

то

Інтегруючи і враховуючи, що в даному випадку є сталою величною, отримуємо
 (2.40)
(2.40)
де  – початковий кут повороту. Рівняння (2.40) – це рівняння рівномірного обертання тіла навколо нерухомої осі.
– початковий кут повороту. Рівняння (2.40) – це рівняння рівномірного обертання тіла навколо нерухомої осі.
Обертання з постійним кутовим пришвидшенням називається рівнозмінним.
Отже, для рівнозмінного обертання  З формули (2.36) маємо
З формули (2.36) маємо

тобто:
 .
.
Інтегруючи і маючи на увазі, що  отримаємо
отримаємо
 (а)
(а)
Знаючи, що  маємо
маємо

Ще раз інтегруючи, знаходимо
 (б)
(б)
Сталі інтегрування  і
і  визначимо з початкових умов. Припустимо, що при
визначимо з початкових умов. Припустимо, що при  кутова швидкість
кутова швидкість  , а кут повороту
, а кут повороту  Тоді з виразів (а) і (б) знайдемо, що
Тоді з виразів (а) і (б) знайдемо, що 
 Остаточно матимемо
Остаточно матимемо
закон зміни алгебраїчної кутової швидкості при рівнозмінному обертанні
 (2.41)
(2.41)
закон рівнозмінного обертання тіла навколо нерухомої осі
 (2.42)
(2.42)
У формулах (2.40)-(2.41)  ,
,  , де і
, де і  – величини кутової швидкості і кутового пришвидшення.
– величини кутової швидкості і кутового пришвидшення.
§ 43.3 Швидкість і пришвидшення точки тіла,
яке обертається навколо нерухомої осі
Як було сказано вище, траєкторіями точки тіла, що обертається навколо нерухомої осі, є кола, площини яких перпендикулярні до осі обертання і центри яких лежать на цій осі. Радіуси цих кіл, а це будуть відстані точок до осі обертання, позначають буквою  На рис. 101 зображено траєкторією деякої точки тіла, що обертається навколо нерухомої осі.
На рис. 101 зображено траєкторією деякої точки тіла, що обертається навколо нерухомої осі.
Тут же зображено (див. також рис. 100)
 – слід нерухомої площини;
– слід нерухомої площини;
 – слід рухомої площини;
– слід рухомої площини;
– кут повороту тіла;
 – кут, який визначає положення точки відносно рухомої площини
– кут, який визначає положення точки відносно рухомої площини 
Оскільки відомо траєкторію, по якій рухається точка  то для визначення її кінематичних характеристик руху використаємо положення і формули натурального способу задання руху точки.
то для визначення її кінематичних характеристик руху використаємо положення і формули натурального способу задання руху точки.
Як відомо (див. § 40), в натуральному способі задання руху точки положення її на траєкторії визначається дуговою координатою  В даному випадку такою дуговою координатою є дуга
В даному випадку такою дуговою координатою є дуга  отже
отже
 .
.
Якщо радіус кола, по якому рухається точка позначити  то матимемо
то матимемо
 (2.43)
(2.43)
Рівняння (2.43) – це закон руху по траєкторії точки тіла, яке обертається навколо нерухомої осі. В даному рівнянні є функцією часу і в загальному випадку змінюється за законом (2.34), а кут 
За формулою (2.19) визначимо величину швидкості
точки
 ,
,
 . (2.44)
. (2.44)
Отже,
швидкість точки тіла, яке обертається навколо нерухомої осі, за величиною дорівнює добутку кутової швидкості на відстань точки до осі обертання.
Вектор швидкості точки напрямлений по дотичній до траєкторії, в даному випадку до кола, що описується точкою , в бік обертання. Оскільки дотична до кола перпендикулярна до його радіуса, котрий проведений в точку дотику, то вектор швидкості точки буде перпендикулярним до її радіуса обертання (  рис. 101). Зауважимо, що швидкість точки тіла, яке обертається, часто називають обертальною швидкістю, а (2.44) – формула, що визначає величину обертальної швидкості.
рис. 101). Зауважимо, що швидкість точки тіла, яке обертається, часто називають обертальною швидкістю, а (2.44) – формула, що визначає величину обертальної швидкості.
За формулами (2.25), (2.22), (2.24), які визначають пришвидшення точки в натуральному способі задання її руху, визначимо пришвидшення точки 
Отже,
пришвидшення точки тіла, яке обертається нав-коло нерухомої осі, дорівнює геометричній сумі її нормального і тангенціального пришвидшень
 (2.45)
(2.45)
Виразимо складові пришвидшення через кінематичні характеристики обертального руху тіла, тобто через і  . Маючи на увазі, що радіус кривизни
. Маючи на увазі, що радіус кривизни  траєкторії точки при русі її по колу дорівнює радіусу цього кола, з формули нормального пришвидшення
траєкторії точки при русі її по колу дорівнює радіусу цього кола, з формули нормального пришвидшення  , використовуючи формулу (2.44), отримуємо
, використовуючи формулу (2.44), отримуємо
 ,
,
 . (2.46)
. (2.46)
Нормальне пришвидшення точки тіла, яке обертається навколо нерухомої осі, дорівнює добутку квадрата кутової швидкості на відстань точки до осі обертання.
З формули  отримаємо
отримаємо
 ,
,
 ;
;  . (2.47)
. (2.47)
Отже,
алгебраїчне значення тангенціального пришвидшен-ня точки тіла, яке обертається навколо нерухомої осі, дорівнює добутку алгебраїчного кутового пришвидшення на відстань точки до осі обертання.
 Як відомо, вектор нормального пришвидшення точки на-прямлений по головній нормалі до центра кривизни. Головна нормаль кола проходить через його центр. Отже, вектор нормального пришвидшення точки тіла, яке обертається навколо нерухомої осі, напрямлений по радіусу кола до його центра (рис. 102). Вектор тангенціального пришвидшення точки напрямлений по дотичній до траєкторії в бік додатного напряму обертання, якщо
Як відомо, вектор нормального пришвидшення точки на-прямлений по головній нормалі до центра кривизни. Головна нормаль кола проходить через його центр. Отже, вектор нормального пришвидшення точки тіла, яке обертається навколо нерухомої осі, напрямлений по радіусу кола до його центра (рис. 102). Вектор тангенціального пришвидшення точки напрямлений по дотичній до траєкторії в бік додатного напряму обертання, якщо  і в протилежний бік, якщо
і в протилежний бік, якщо  . На рис. 102 вектор зображений для випадку, коли
. На рис. 102 вектор зображений для випадку, коли 
Повне пришвидшення визначається діагоналлю прямокутника, побудованого на тангенціальному і нормальному пришвидшеннях. Його величина вираховується за формулою
 . (2.48)
. (2.48)
Напрям вектора повного пришвидшення визначається кутом нахилу  цього вектора до радіуса. Тангенс цього кута (рис. 102)
цього вектора до радіуса. Тангенс цього кута (рис. 102)
 (2.49)
(2.49)
З отриманої формули маємо, що кут нахилу до радіуса кола вектора повного пришвидшення точки тіла, яке обертається навколо нерухомої осі, не залежить від положення точки, яке визначається її радіусом, і для всіх точок він має одне і те ж значення.
 Якщо врахувати, що величина вектора пришвидшення точки тіла, яке обертається навколо нерухомої осі, пропорційна відстані до осі обертання (формула 2.48), а кут нахилу його до відповідного радіуса для всіх точок однаковий, то розподіл (епюр) пришвидшень точок тіла, що обертається навколо нерухомої осі, матиме вигляд, зображений на рис. 103.
Якщо врахувати, що величина вектора пришвидшення точки тіла, яке обертається навколо нерухомої осі, пропорційна відстані до осі обертання (формула 2.48), а кут нахилу його до відповідного радіуса для всіх точок однаковий, то розподіл (епюр) пришвидшень точок тіла, що обертається навколо нерухомої осі, матиме вигляд, зображений на рис. 103.
Формули (2.44)-(2.47) визначають вектор пришвидшення точки тіла, яке обертається навколо нерухомої осі
Примітка. Часто нормальне пришвидшення точок тіла, яке обертається навколо нерухомої осі, називають доцентровим і позначають  (в російській літературі
(в російській літературі  – центро-
– центро-
стремительное ускорение), а тангенціальне пришвидшення називають обертальним пришвидшенням і позначають  (в російській літературі
(в російській літературі  – вращательное ускорение). При таких позначеннях формула (2.44) набуває вигляду
– вращательное ускорение). При таких позначеннях формула (2.44) набуває вигляду
 (2.49, а)
(2.49, а)
і читається так:
пришвидшення точок тіла, яке обертається нав-коло нерухомої осі, дорівнює геометричній сумі її доцентрового і обертального пришвидшень.
§ 43.4 Вектор кутової швидкості
Для спрощення майбутніх теоретичних викладок зробимо одне припущення. Припустимо, що кутова швидкість – це вектор.
Вектором кутової швидкості твердого тіла, яке обер-тається навколо нерухомої осі, будемо називати вектор, який чисельно дорівнює модулю алгебраїчної кутової швидкості і напрямлений вдовж осі обертання в бік, звідки обертання тіла видно проти руху годинникової стрілки(рис. 104).
 Вектор
Вектор  є ковзним вектором, бо його можна відкласти з будь-якої точки осі.
є ковзним вектором, бо його можна відкласти з будь-якої точки осі.
Задання вектора кутової швидкості повністю визначає обертальний рух тіла, адже він вказує на положення осі обертання, напрям обертання і швидкість обертання. Сам вектор швидкості можна виразити так:
 (2.50)
(2.50)
де  – одиничний вектор осі обертання.
– одиничний вектор осі обертання.
Оскільки кутове пришвидшення дорівнює першій похідній за часом від кутової швидкості, то:
перша похідна за часом від вектора кутової швидкості визначає вектор кутового пришвидшення
 (2.51)
(2.51)
або, використовуючи формулу (2.50) і знаючи, що  , матимемо
, матимемо
 (2.52)
(2.52)
З формули (2.52) випливає, що вектор кутового пришвидшення тіла, що обертається навколо нерухомої осі, також напрямлений по осі обертання, а можливі випадки взаємного розміщення векторів і показані на рис. 105).
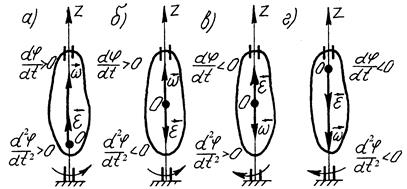
Рис. 105
§ 43.5 Векторні вирази швидкості, доцентрового
і обертального пришвидшень точки тіла
при обертальному русі
Розглянемо тверде тіло, що обертається навколо нерухомої осі (рис. 106), на якому також зображено:
– траєкторію довільної точки тіла;
– вектор її швидкості  , дотичний до траєкторії і напрямлений в бік обертання;
, дотичний до траєкторії і напрямлений в бік обертання;
– вектор кутової швидкості тіла з довільної її точки  в бік, звідки обертання тіла видно проти руху годинникової стрілки;
в бік, звідки обертання тіла видно проти руху годинникової стрілки;
 – радіус-вектор точки . Початок його знаходиться в центрі .
– радіус-вектор точки . Початок його знаходиться в центрі .
 Зауважимо, що вектор
Зауважимо, що вектор  (бо вектор швидкості перпендикулярний до радіуса обертання) і
(бо вектор швидкості перпендикулярний до радіуса обертання) і  (тому що вектор швидкості знаходиться в площині траєкторії, яка в даному випадку перпендикулярна до осі обертання). Отже, вектор є перпендикулярним до площини
(тому що вектор швидкості знаходиться в площині траєкторії, яка в даному випадку перпендикулярна до осі обертання). Отже, вектор є перпендикулярним до площини  , тобто до площини, яка проходить через вектори і . Величина вектор швидкості визначається за формулою (2.44)
, тобто до площини, яка проходить через вектори і . Величина вектор швидкості визначається за формулою (2.44)

 (а)
(а)
З  маємо
маємо  .
.
Підставивши значення  у формулу (а), отримаємо
у формулу (а), отримаємо
 .
.
Отже, модуль швидкості дорівнює модулю векторного добутку і , який можна записати двояко:  або
або  . З визначення векторного добутку випливає, що тільки добуток
. З визначення векторного добутку випливає, що тільки добуток  буде визначати вектор, який співпадає за напрямом з вектором швидкості , тобто
буде визначати вектор, який співпадає за напрямом з вектором швидкості , тобто
 ,
,
або
 . (2.53)
. (2.53)
Вектор швидкості точки тіла, яке обертається навколо нерухомої осі, дорівнює векторному добутку кутової швидкості на радіус-вектор точки, початок якого знаходиться в довільному центрі на осі.
Формулу (2.53) часто називають формулою Ейлера. Зауважимо, що за часів Л. Ейлера (1707-1783) поняття векторного добутку ще не існувало, але ним були отримані формули
 (2.54)
(2.54)
які є фактично проекціями векторного добутку (2.53) на декартові осі координат.
Оскільки

то враховуючи формулу (2.53), отримаємоформулу, яка визначає значення першої похідної за часом від радіуса-вектора, який змінюється тільки за напрямом
 . (2.55)
. (2.55)
Взявши першу похідну за часом від формули (2.53)
і враховуючи, що 

 отримаємо
отримаємо
Легко показати (пропонується кожному читачеві це зробити самостійно), що векторний добуток  визначає вектор обертального (тангенціального) пришвидшення, а векторний добуток
визначає вектор обертального (тангенціального) пришвидшення, а векторний добуток  визначає вектор доцентрового (нормального) пришвидшення, тобто
визначає вектор доцентрового (нормального) пришвидшення, тобто
 , (2.56)
, (2.56)
 . (2.57)
. (2.57)
Формули (2.53), (2.56), (2.57) є векторними виразами швидкості, тангенціального (обертального) і нормального (до-центрового) пришвидшень.
Питання для самоконтролю
1. Наведіть приклади простих рухів твердого тіла.
2. Який рух твердого тіла називається поступальним?
3. Сформулюйте теорему про траєкторії, швидкості і пришвидшення точок тіла, котре здійснює поступальний рух.
4. Запишіть кінематичні рівняння поступального руху твердого тіла.
5. Який рух твердого тіла називається обертальним нав-коло нерухомої осі?
6. Запишіть рівняння обертання твердого тіла навколо нерухомої осі.
7. Тіло обертається навколо нерухомої осі за законом  рад. Визначте його кутову швидкість і кутове пришвидшення в момент
рад. Визначте його кутову швидкість і кутове пришвидшення в момент  с.
с.
8. При рівномірному обертанні маховик робить 2 оберти за хвилину. За який час маховик повертається на кут  рад?
рад?
9. Ротор електродвигуна робить 900 об/хв. З якою кутовою швидкістю в рад/с обертається ротор?
10. Кутове пришвидшення тіла, яке обертається навколо нерухомої осі, змінюється за законом  с–2. Визначіть кутову швидкість тіла в момент
с–2. Визначіть кутову швидкість тіла в момент  с, якщо в початковий момент часу
с, якщо в початковий момент часу  воно мало кутову швидкість
воно мало кутову швидкість  с–1.
с–1.
11. Тіло обертається навколо нерухомої осі з кутовим пришвидшенням  с–2. Яку кутову швидкість матиме тіло в момент часу
с–2. Яку кутову швидкість матиме тіло в момент часу  с,
с,
Дата добавления: 2015-06-10; просмотров: 1866;