Оценивание координат состояния систем
Оценивание координат состояния систем требуется в случае необходимости введения в систему автоматического управления корректирующего сигнала от какой-либо координаты состояния xi, которая не измеряется как физическая.
Для этого служит косвенная оценка неизмеряемых координат состояния системы путем введения так называемого “наблюдателя” по Калману [2]. Метод оценки вектора состояния дает возможность “восстановить” неизмеряемые координаты вектора состояния в виде  и использовать “восстановленный” вектор состояния системы для решения задачи, например, модального синтеза в пространстве состояний.
и использовать “восстановленный” вектор состояния системы для решения задачи, например, модального синтеза в пространстве состояний.
Схема оценивания координат состояния реализуется в виде дополнительной динамической аналоговой модели - наблюдателя.
Для получения алгоритма наблюдателя Калмана запишем в векторно-матричной форме уравнения объекта управления
 (10.50)
(10.50)
и управляющее воздействие
U = -M  + FG , (10.51)
+ FG , (10.51)
где G - задающее воздействие;
A, B, M, F - матрицы коэффициентов.
Выходные координаты системы задаются в виде
Y = CX .
Оценка координат состояния системы наблюдателем формируется следующим образом:
 = A - BM + P( Y - C ) + BFG , (10.52)
= A - BM + P( Y - C ) + BFG , (10.52)
где P - тоже матрица коэффициентов.
Рассматривая совместно уравнения (10.50), (10.51) и (10.52), получим
 (10.53)
(10.53)
= PCX + (A - BM- PC) + BFG , (10.54)
или в векторно-матричной форме
 .
.
Из полученных уравнений видно, что при использовании наблюдателя порядок всей системы увеличивается до 2n, тогда как n - число координат, которые можно использовать для управления системой, сохраняется.
Характеристическое уравнение системы с наблюдателем имеет вид
 . (10.55)
. (10.55)
Для оценки точности работы наблюдателя перейдем к новым координатам в виде DX = X - . Вычитая (10.54) из (10.53), получаем
D  = AX - PCX - (A - PC) = A[ X - ] - PC[ X - ].
= AX - PCX - (A - PC) = A[ X - ] - PC[ X - ].
Следовательно,
D = (A - PC) DX. (10.56)
Из уравнения (10.53), заменяя  = X - DX, при отсутствии задающего воздействия G имеем
= X - DX, при отсутствии задающего воздействия G имеем
или
 (10.57)
(10.57)
Уравнения (10.57) и (10.56) в векторно-матричной форме имеют вид
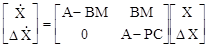 . (10.58)
. (10.58)
Характеристическое уравнение для этой системы будет
 .
.
Оно принимает вид
D(l) = |lE - A + BM|´|lE - A + PC| = 0,
т. е. распадается на два уравнения
|lE - A + BM| = 0, (10.59)
|lE - A + PC| = 0. (10.60)
Последнее обстоятельство дает возможность независимого модального синтеза как основной системы с координатами вектора X по уравнению (10.59), так и системы определения погрешности DX по уравнению (10.60). Требуется, чтобы погрешность наблюдения DX(t) быстро затухала во времени.
Существуют и другие схемы наблюдателей, каждый из которых обладает своими особенностями.
Дата добавления: 2015-06-01; просмотров: 960;