Лекція 8
Функціональні, принципової і структурні схеми систем автоматики. Складання рівнянь динаміки систем.
Функціональні, принципової і структурні схеми систем автоматики
При розробці систем автоматичного регулювання використовують три види схем: функціональні, принципіальні і структурні.
Функціональною називається схема системи автоматичного регулювання, що містить елементи, розглядувані з точки зору їх функціонального призначення, -чутливий, перетворювальні і підсилювальні, виконавчий і регулювальний елементи. На рис. 2.25 показана функціональна схема системи автоматичного регулювання тиску стиснутого повітря в резервуарі.
Іс
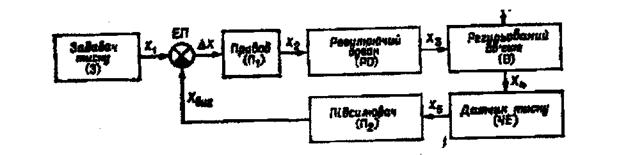
Рис. 2.25. Функціональна схема системи автоматичного регулювання тиску стиснутого повітря.
У кожному конкретному випадку, виходячи із завдань автоматичного регулювання, можна скласти тільки одну функціональну схему системи. Окремий елемент функціональної схеми можна замінити певним пристроєм автоматики. Стосовно CAP, зображеної на рис. 2.25, наприклад, як датчик тиску можна взяти одновиткову манометричну пружину, роль задавача регульованої величини може виконувати ковпачок, що стискує пружину, підсилювача - гідравлічний підсилювач типу сопло-заслінка з важільним підсилювачем, привода -гідравлічний циліндр односторонньої дії, регулювального органа - клапан.
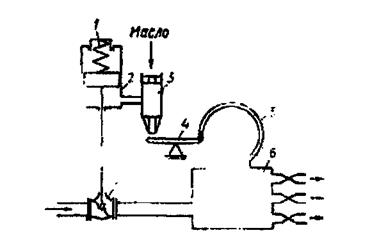
Рис. 2.26. Принципова схема системи автоматичного регулюванні тиску стиснутого повітря: 1-пружина задавач; 2-циліндр; 3- підсилювач; 4- важіль; 5-манометрична пружина; 6-об'єкт; 7-клапан.
Деякі функціональні елементи не завжди замінюють реальними пристроями при такому переході. Наприклад, порівняння сигналів можна здійснити зустрічним увімкненням виходів відповідних пристроїв, і в такому разі немає потреби застосовувати елемент порівняння. Іноді сигнали порівнюють за допомогою операційних, магнітних підсилювачів та інших пристроїв і елемент порівняння включають до схеми системи. Замінивши кожен функціональний елемент реальним пристроєм автоматики і з'єднавши їх відповідно до передачі діянь, дістанемо принципіальну схему системи автоматичного регулювання (рис. 2.26). В усталеному режимі у міждросельному просторі гідравлічного підсилювача типу сопло-заслінка і гідравлічному циліндрі розвивається певний тиск масла, а отже, і зусилля на поршні. Пружина-задавач компенсує це зусилля, і шток клапана нерухомий. При підви-щенні тиску в об'єкті вільний кінець манометричної пружини перемішується, тягнучи жорсткий важіль підсилювача і збільшуючи зазор у гідравлічному підсилювачі. При цьому тиск масла в гідравлічному підсилювачі і циліндрі знижується, під дією пружини-задавача поршень переміщується вниз, прикриваючи клапан. Тиск в об'єкті знижується в результаті зменшення припливу стиснутого повітря.
Аналіз функціональної схеми системи автоматичного регулювання тиску стиснутого повітря в резервуарі показує, що розглянутий варіант принципіальної схеми (рис. 2.26) не єдиний Наприклад, можна побудувати другий варіант системи, використовуючи гармонікову мембрану, підсилювач із золотником і гідравлічний циліндр двосторонньої дії. Застосувавши пневматичний циліндр і підсилювач, можна будувати пневматичний варіант системи автоматичного регулювання тиску стиснутого повітря в резервуарі. Якщо як датчик використовувати п'єзоелектричний манометр, а також електронний підсилювач, двофазний реверсивний асинхронний двигун з редуктором, то матимемо електричний варіант CAP. Нарешті, можна побудувати низку комбінованих пневмо- і гідроелектричних варіантів цієї ж системи. Із розглянутого видно, що за однією функціональною схемою можна створити кілька варіантів принципіальних схем систем автоматичного регулювання.
При розробці систем автоматичного регулювання завжди посилає питання про вибір найкращого варіанту принципіальної схеми. Відповідь на це запитання одержати, як правило, непросто, оскільки розроблена система повинна відповідати низці умов. Передусім треба віддавати перевагу варіантам схем, які забезпечують високу експлуатаційну надійність системи. Це схеми, як складено в основному з безконтактних і герметизованих елементів, а також напівпровідникових приладів та інтегральних мікросхем. При цьому слід мати на увазі, що ненадійна система автоматичного регулювання при інших добрих її характеристиках виявляється практично некорисною.
Другою умовою, якій повинна відповідати система автоматичного регулювання, є забезпечення стійкості і необхідної якості, тобто точності підтримання регульованої величини, що оцінюється величиною її відхилення від заданого значення в усталеному й перехідному режимах. Нестійка система характеризується безмежним відхиленням регульованої величини від заданого значення у бік збільшення або зменшення при наявності збурюючих діянь і тому вона нероботоздатна. Низькі якісні показники автоматичних систем не дають змоги використовувати їх на практиці. Тому при розробці основним завданням є створення стійких систем автоматичного регулювання із заданою якістю.
Використовують два підходи при розв'язуванні цього завдання -досліджують наявну систему і визначають, наскільки вона задовольняє поставлені вимоги (аналіз системи), і проектують систему автоматичного регулювання відповідно до заданих вимог щодо якості (синтез системи). Аналіз системи звичайно здійснюють кілька разів, змінюючи кількість і параметри елементів і добиваючись задовільної якості процесу регулювання. Аналіз лінійних систем автоматичного регулювання розроблено досить повно, а завдання синтезу в загальному вигляді дуже складне і тепер ще повністю не розв'язане. При синтезі систему автоматичного регулювання поділяють на дві частини - з незмінними і змінними характеристиками. До незмінної частини системи звичайно входять регульований об'єкт, датчик, виконавчий і порівнювальний елементи регулятора, а до змінної - підсилювач і один або кілька коректуючих пристроїв. У процесі синтезу знаходять параметри і структуру змінюваної частини системи автоматичного регулювання за умови забезпечення вимог, що ставляться до неї.
Створення систем автоматичного регулювання із заданими якісними показниками методом аналізу трудомістке, синтез спрощує розробку автоматичних систем, але його завдання, як правило, також не мають однозначного розв'язання. Тому звичайно складають кілька варіантів розв'язування і вибирають найкращий.
Дата добавления: 2015-05-16; просмотров: 1486;