Лекція 11. Пневматичні П-регулятори, ПІ-регулятор та ПІД-регулятор. Пневматичні імпульсні регулятори (П, ПІ та ПІД-регулятори).
Система управління технологічними процесами являють собою сполучення одного або декілька об’єктів і одного або декілька управляючих притроїв, які взаємодіють між собою таким чином, щоб забезпечити ефективне виконання функцій управління технологічним процесом.
Простішими системами управління є автоматичні системи, які здійснюють стабілізацію окремого параметра або його зміну по заданій програмі – це системи автоматичного регулювання. В цих системах інформація о технологічних параметрах одержана за допомогою засобів автоматичного контролю, поступає в спеціалізовані розрахункові пристрої які здійснюють автоматичне регулювання. Простішими з таких розрахункових пристроїв є регулятори. Використання того чи іншого типу регулятора визначається особливостями об’єктів регулювання. Об’єкти умовно розподіляють на прості та складні. До простих об’єктів відносять об’єкти, у яких хід технологічного процесу визначається тільки одною регуліруємою величиною.
При автоматизації простих об’єктів використовують одно контурні системи регулювання з одним регулятором.
На рис.3.1 показана схема включення регулятора в одно контурну пневматичну систему автоматичного регулювання.
Алгоритм роботи регулятора це закон регулювання залежність вихідного сигнала РВИХ. регулятора від вхідного і часу. Вхідним сигналом регуляторів є перепад тисків, пропорційний поточному та заданому значенню регулює мого параметру, т. б. Рn – Р3.

Рис.3.1. Схема одно контурної пневматичної системи автоматичного регулювання.
Пневматичні аналогові регулятори.
Пропорційний регулятор (П-регулятор) реалізує операцію
 (3.1)
(3.1)
де К – коефіцієнт підсилення регулятора; Рпоч. – тиск, що відповідає початковому рівню роботи виконавчого механізму, при якому Рn = Р3.
Пропорційно-інтегральний (ПІ-регулятор) реалізує операцію
 (3.2)
(3.2)
де Ті – постійна часу інтегрування регулятора.
Пропорційно-інтегрально-диференціальний (ПІД-регулятор) реалізує операцію
 (3.3)
(3.3)
де ТД – постійна часу диференціювання.
Пневматичний П-регулятор (рис.3.2) зібраний на мембранних елементах.
Регулятор включає в себе суматор 1, підсилювач тиску 2, підсилювач потужності 4, за датчик початкового рівня вихідного сигнала 3 та вимикаючого реле 5. в камеру В суматора 1, який являє собою чотирьохвходовий підсилювач, що робе в режимі підсумування, поступає тиск завдання Р3 від вторичного прибора, в камеру Г – тиск Рn, пропорційний поточному значенню регулюємої величини, а в камеру Д – тиск Рпоч. Від за датчика 3, що відповідає початковому значенню вихідного сигнала регулятора. На виході суматора відробляється тиск
 (3.4)
(3.4)
Підсилювач тиску 2 підсилює тиск Р і Рпоч.. Сигнал заперечного зворотнього зв’язку в підсилювач 2 поступає з виходу підсилювача потужності 4, що збільшує точність роботи останнього. Тиск на виході підсилювача 2
 (3.5)
(3.5)
де К – коефіцієнт підсилення регулятора, що дорівнює відношенню  провідностей опорів.
провідностей опорів.
Підставив значення Р з (3.4) в (3.5), одержимо
 (3.6)
(3.6)
Т. ч. регулятор реалізує пропорційний закон регулювання. Коефіцієнт підсилення налагоджується шляхом зміни провідності k1 пневмоопора. Для гашення автоколивань вузла мембранного блока підсилювача 2, які виникають при різних змінах тиску на виході регулятора, використовують додатній та заперечний зворотній зв’язок, що впливає крізь камери В і Г і компенсує один одного.
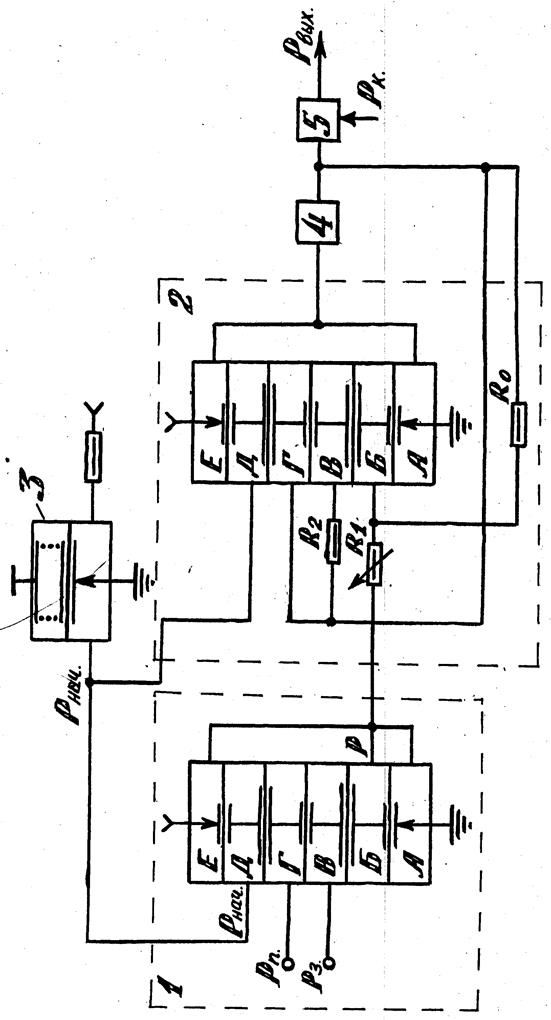
Пневматичний ПІ-регулятор. Схема аналогового ПІ-регулятора показана на рис.3.3. Регулятор складається з суматора 1, підсилювача тиску 2, підсилювача потужності 4, інтегратора 3 та вимикаючого реле 5. Від попереднього регулятора він відрізняється тим, що замість за датчика встановлен інтегратор 3. Тиск на виході інтегратора змінюється по закону
 (3.7)
(3.7)
де Ті – час інтегрування, що визначається ємністю V і провідністю k з опору.



Вихідний тиск ПІ-регулятора представлено в вигляді
 (3.8)
(3.8)
Підставив замість Рі в (3.8) його значення з (3.7), одержимо
 (3.9)
(3.9)
Час інтегрування регулятора змінюють провідністю k3 опора.
Пневматичний ПІД-регулятор.
Введення в закон регулювання замість пропорційної складаючої інтегральної складаючої усуває статичну похибку підтримки регулює мого параметра, але збільшує час регулювання. Тому в випадках, коли треба забезпечити відсутність статичної похибки і одержати малий час регулювання, застосовують ПІД-регулятори. Скорочення часу регулювання досягається за рахунок того, що регулятор діє на прцес не тільки в залежності від відхилення регулюємого параметра, але і від швидкості його зміни.
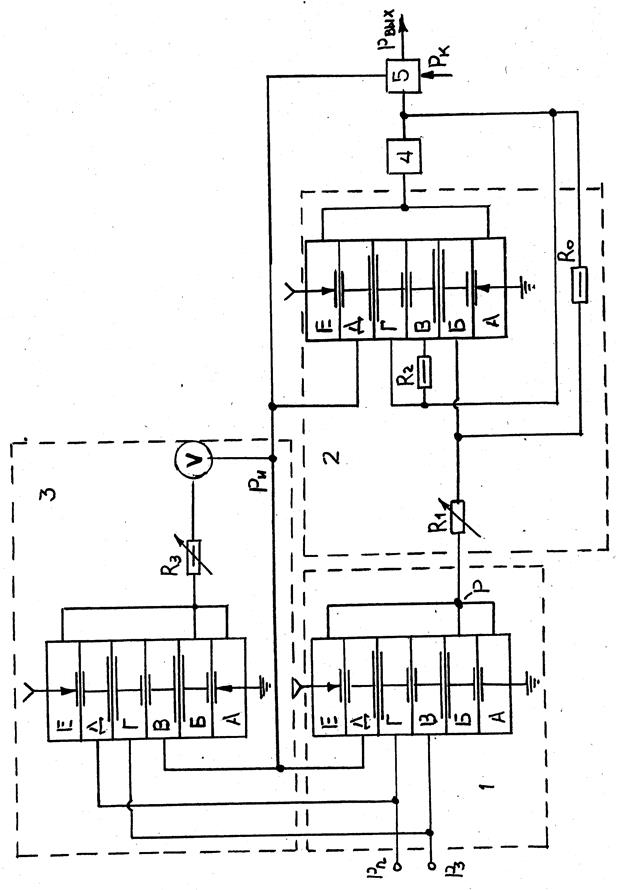
ПІД – закон регулювання реалізують, включив послідовно ПІ-регулятор та пристрій предваренія. Схема ПІД-регулятора на мембранних елементах показана на рис.3.4. Він складається з пристроя предваренія 6, пневматичного інтегратора 3, мембранного підсилювача 1, підсилювача тиску 2, підсилювача потужності 4 та двох вимикаючих реле 5 і 7. Тиск, що відповідає значенню регулює мого параметру, поступає на вихід пристроя предваренія 6 і інтегратора 3. елементи 1-4 складають ПІ-регулятор, в інтегратор якого поступає тиск Рn, а в мембранний підсумовував замість тиску Рn – тиск РД від блоку предваренія. Тиск на виході ПІ-регулятора
 (3.10)
(3.10)
Тиск на виході пристроя предваренія  де Тn – час предворенія пристрою 6, значення якого налаштовується зміною провідності k4 пневмоопору.
де Тn – час предворенія пристрою 6, значення якого налаштовується зміною провідності k4 пневмоопору.
Дата добавления: 2015-05-21; просмотров: 3225;