При рішенні задач автоматизації буває необхідно автоматично піддержувати
найбільше або найменше значення будь-якого технологічного або економічного
показника процесу. Така задача виникає в тих випадках, коли статистична
характеристика об’єкта управління по вказаному показнику має екстремальний
характер, причому максимум або мінімум показника відповідає найвигіднішому
режиму роботи об’єкта.
Для автоматичного пошуку положення екстремуму статичної характеристики викорис-
товують регулятори, які називають екстремальними.
Роздивимось схему найбільш часто використовує мого екстремального регулятора для
автоматичного пошуку екстремуму на об’єктах, що мають значну інерцію. В основу
роботи цього регулятора покладений кроковий метод пошуку екстремуму. Регулятор
складається(рис.3.7) з пристрою запам’ятовування І, пристрою зрівняння ІІ, тригера ІІІ
інтегратора ІV безперервно-дискретної дії, підсилювача потужності V, генератора VI,
прямокутних коливань та вузла обмеження VII. Пристрій І служить для запам’ятову-
вання на час, який дорівнює одному періоду коливань генератора, сигнал  пропор-
пропор-
ційного оптимізуємого параметру, пристрій ІІ – для порівняння змінного сигналу
на вході в регулятор в кінці і-го періоду коливань генератора з сигналом  ,
,
який має місце на вході в регулятор в кінці  -го періоду коливань генератора і
-го періоду коливань генератора і
поступаючим в пристрій зрівняння з пристрою запам’ятовування; пневматичний три-
гер ІІІ – для управління роботою інтегратора ІV по командам пристрою зрівняння ІІ.
Інтегратор ІV формує вихідний сигнал екстремального регулятора і по команді три-
гера змінює напрямок руху регулює мого органу; генератор синхронізує роботу прист-
роїв І, ІІ і ІV(період його коливань вибирається в залежності від часу перехідного про-
цессу в об’єкті управління), вузол обмеження VII служить для формування команд на
реверсування пошуку при досягненні деякими параметрами допустимих значень.

Рис.3.7. Блок-схема екстремального регулятора з кроковим пошуком екстремуму.
Порядок роботи екстремального регулятора при пошуку максимуму можна побачити на рис.3.8:
1) при деякому значенні вихідного сигналу регулятора  , який відповідає певному значенню вхідної координати об’єкта, дається команда на крок регульованого органу, наприклад в сторону збільшення . При цьому в пристрої пам’яті(рис.3.7) запам’ятовується значення вихідного параметра
, який відповідає певному значенню вхідної координати об’єкта, дається команда на крок регульованого органу, наприклад в сторону збільшення . При цьому в пристрої пам’яті(рис.3.7) запам’ятовується значення вихідного параметра  об’єкту;
об’єкту;
2) в кінці крока одержане значення  , що складається з деякого величиною
, що складається з деякого величиною  , зрівнюється з запам’ятованим значенням . Величиною визначає зону нечуттєвості регулятора. Якщо при зрівнянні виявляється, що
, зрівнюється з запам’ятованим значенням . Величиною визначає зону нечуттєвості регулятора. Якщо при зрівнянні виявляється, що  т.б. вихідна координація об’єкту зростає, то виконується ще один крок в тому ж напрямку;
т.б. вихідна координація об’єкту зростає, то виконується ще один крок в тому ж напрямку;
3) рух в одному напрямку відбувається до тих пір, поки одержана в результаті слідуючого кроку вихідна координата об’єкту, складена з величиною , не стане менше, ніж значення вихідної координати, яке запамя’ятоване в попередньому кроці, наприклад 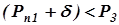 ;
;
4) при вказаних умовах, які в загальному випадку мають вигляд  , здійснюється реверс регулятора, т.б. зміна напрямку зміщення регульованого органу;
, здійснюється реверс регулятора, т.б. зміна напрямку зміщення регульованого органу;
5) рух в цьому напрямку відбувається до тих пір, поки знову не буде виконуватися умова, що відповідає п.4;
6) в зоні екстремуму регулятора весь час переміщує регульований орган в прямому і зворотному напрямку, а вихідна координата об’єкта знаходиться то зліва, то справа від екстремуму, т.б. регулятор здійснює “рискання”. При цьому “рискання” визначається умовами п.4.
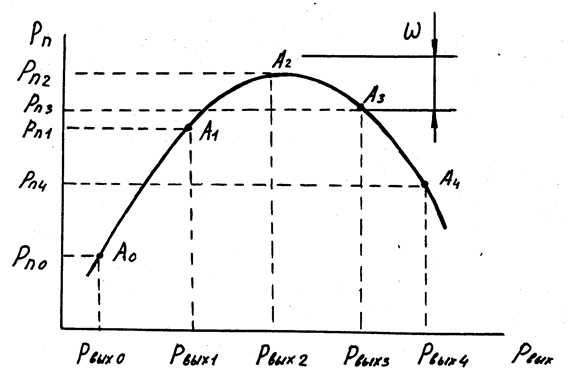
Рис.3.8. Графік до пояснення роботи екстремального регулятора з кроковим тиском єкстемуму.
Література: [3], стор.465-472; [7], стор.108-112.
Лекція 14. Безперервні системи стабілізації процесів. Дискретні та комбіновані системи управління.
Під системою автоматичного управління звичайно розуміють сполучення об’єкту управління ОУ та управляючого пристрою УП(рис.3.9) з урахуванням усіх існуючих між ними зв’язків, а також зв’язків між даною системою і зовнішніми по відношенню до неї об’єктами.
Рис.3.9. Система автоматичного управління.
Об’єктом управління ОУ є агрегат, призначений для реалізації технологічного процесу, оснащений виконавчими механізмами та датчиками.
Інформація  про стан параметрів об’єкта формується датчиками і передається на УП. Управляючий пристрій приймає цю інформацію і переробляє її в управляючу дію
про стан параметрів об’єкта формується датчиками і передається на УП. Управляючий пристрій приймає цю інформацію і переробляє її в управляючу дію  . Виконавчі механізми приймають управляючу дію і впливають на об’єкт так, щоб в ньому виконувався заданий технологічний процес. Як об’єкт, так і управляючий пристрій приймає також зовнішню дію(відповідно
. Виконавчі механізми приймають управляючу дію і впливають на об’єкт так, щоб в ньому виконувався заданий технологічний процес. Як об’єкт, так і управляючий пристрій приймає також зовнішню дію(відповідно  і
і  ), яка чинить вплив на характер діючого процесу.
), яка чинить вплив на характер діючого процесу.
Управляючий пристрій реалізує закон управління, який виражається у вигляді функціональної залежності управляючого впливу від впливів і . По характеру реалізує мого закону управління системи розподіляють на безперервні, дискретні та комбіновані(безперервно-дискретні).
Особливості систем управління.
В безперервних системах сигнали, відповідаючі впливам , , є безперервні, т.б. можуть приймати любе значення і безперервно змінюються в заданому діапазоні.
В пневмоавтоматиці увесь діапазон зміни безперервних сигналів складає 
Закони управління в цьому випадку виражаються за допомогою диференційних рівнянь, і УП є пристроєм безперервної дії. До безперервних систем відносяться головним чином системи регулювання, які здійснюють стабілізацію технологічних параметрів об’єкта, змінюючи їх по заданому безперервному закону і т.д. Значення регульованого параметра вимірюють датчиками, які формують безперервну величину , що зрівнюються з заданою величиною в регулюючому пристрої. Під впливом зовнішньої обурюючої дії виникає розсогласування між значеннями і , в залежності від якого формується регулююча дія на виконавчі органи об’єкта. Значення може бути постійною величиною(системи стабілізацію) або деякою заданою безперервною функцією часу(системи програмного регулювання).
В дискретних системах інформація , , кодується дискретними сигналами, які приймають тільки визначені фіксовані значення. В пневмоавтоматиці застосовують дворівневі сигнали порівняні з атмосферним тиском і тиском живлення і позначені відповідно 0 і 1.
Закон управління в цьому випадку виражається за допомогою співвідношень математичної логіки та теорії кінцевих автоматів, а управляючий пристрій є пристроєм дискретної дії. До дискретних систем відносяться циклічні системи, призначені для реалізації виробничих процесів, які являють собою послідовність технологічних операцій, кожна з яких викликається дискретною зміною дії на об’єкт і контролюється дискретною зміною дії на управляючий пристрій.
Комбіновані системи характеризуються тим, що в них реалізується як безперервний, так і дискретний закон управління. До них відносяться системи в яких виконання виробничого процесу необхідно здійснювати у вигляді дискретної послідовності операцій і, крім того, реалізувати деякі безперервні операції, наприклад регулювання технологічних параметрів; системи, призначені для реалізації безперервного закону управління, але з дискретними переключеннями з одного режиму на другий(з переналагодженням); системи, які використовують широтно-імпульсну модуляцію, т.і.
Для опису законів управління комбінованих систем використовують математичний апарат диференційних і кінцево-різних рівнянь, а також апарат математичної логіки і теорії кінцевих автоматів.
В промисловості застосовують пневматичні системи управління усіх вказаних типів. Традиційними областями застосування безперервних та комбінованих систем служать хімічна, нафтопереробна, їстівна та другі галузі промисловості. Пневматичні дискретні системи використовують для управління верстатами кузнечно-пресовим і збірковим обладнанням, транспортно-загрузочними пристроями, а також пристроями в інших галузях промисловості.
1. Системи управління безперервної дії.
До цих систем відносяться системи стабілізації параметрів процесів. Роздивимось систему стабілізації, в яких використовуються прибори системи СТАРТ.
Система регулювання температури на установці кондиціювання повітря.
Для створення стабільного температурно-вологого режиму в приміщеннях, де це необхідно по вимогам технології процесу, застосовують кондиціювання повітря.
Система регулювання температурного режиму кондиціонера приведена на рис.3.10.
Для економії тепло – і холодоносія в осінній та весінній періоди була запропонована система регулювання температури(регулятор ПР3.21 – пропорційно-інтегральний регулятор з пределами пропорційності  ) на виході з кондиціонера з використанням п’яти приборів простіших алгебраїчних операцій(ПФ1.1).
) на виході з кондиціонера з використанням п’яти приборів простіших алгебраїчних операцій(ПФ1.1).
Зовнішнє повітря крізь заслінку 1 і рециркуляційне поступають в кондиціонер. Подача теплоносія відбувається по лінії 6. Холодоносій в камеру зрошування 3 подають по лінії 5, рециркуляція його відбувається по лінії 4. Робоче повітря відводиться в преміщення. Система регулювання робить в чотирьох режимах:  змінюється від 0 до
змінюється від 0 до  від
від  до
до 


Режиму 1 відповідає сама низька температура зовнішнього повітря, а режиму 4 сама висока.
Прибори простіших алгебраїчних операцій(ПФ1.1) мають слідуючи налагодження:
 для прибору 7;
для прибору 7;
 для приборів 8 і 9;
для приборів 8 і 9;
 для приборів 10 і 11.
для приборів 10 і 11.
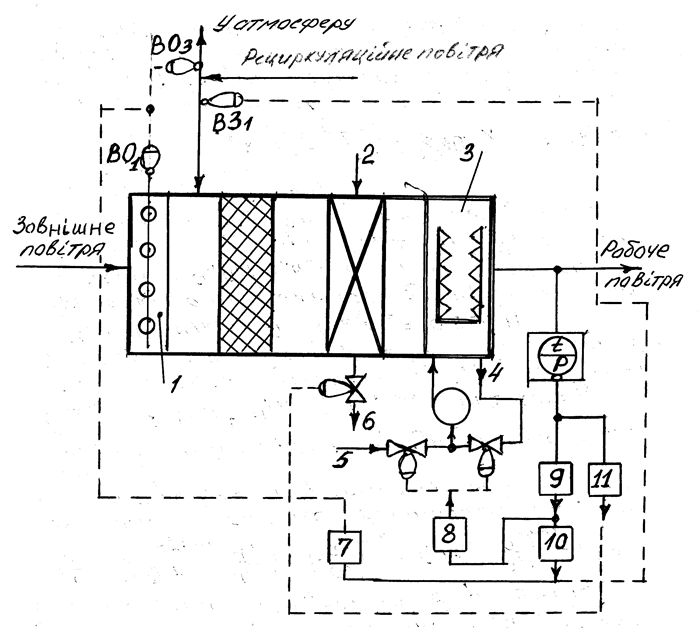
Рис.3.10. Система регулювання температурного режиму кондиціонера.
Режим 1. регулятора  поступає на прибор 11, який переводить клапан 6 на теплоносії з стану “зачинено” в стан “відчинено”.
поступає на прибор 11, який переводить клапан 6 на теплоносії з стану “зачинено” в стан “відчинено”.
Режим 2. регулятора поступає на вхід прибору 9, який діє на прибор 10, що переводить клапан ВЗ1(на циркуляційному повітрі) в стан “зачинено”, а клапан ВО1(на зовнішньому повітрі) крізь прибор 7 в стан “відчинено”.
Режим 3. регулятора крізь прибор 9 приводить в дію прибор 8, який відчиняє клапан ВО2 на лінії холодоносія 5, при цьому клапан ВЗ3 на рециркуляції 4 холодоносія зачиняється.
Режим 4. Спрацьовує спеціальний контактний пристрій, припиняється подача команди від прибору 10 на клапан ВЗ1. Одночасно прибор 10 крізь прибор 7 відчиняє клапан ВО3 в атмосферу і зачиняє клапан ВО1 на зовнішньому повітрі в залежності від налагодження прибору 7, в результаті забезпечується подача повітря в приміщення відповідно з санітарними нормами.
2. Системи управління дискретної дії.
Циклічні процеси виявляють собою повторюючись послідовність ряда технологічних операцій.
Перехід в циклічному процесі від одної операції до другої створюються або по сигналам від датчиків, або закінченні визначеного часу з початку попередньої операції. В обох випадках перехід до слідуючої операції може залежати від значення зовнішніх(по відношенню до даної системи) сигналів, що подаються оператором або поступають з других систем. Зовнішні сигнали дозволяють переривати процес, вибирати ту чи іншу послідовність операцій і т.д.
В системах управління циклічним процесом існує два основних режими роботи: циклічний та налагоджений, різниця між ними полягає в засобі формування умов переходу від операції до операції.
В циклічному режимі зустрічаються окремі операції, що викликаються вручну(наприклад, пуск процесу), а в налагодженому цілі послідовності операції. Для запобігання поломок і забезпечення техніки безпеки в налагодженому режимі дотримуються блокировки між виконавчими механізмами. Циклічний режим звичайно утримує регулярні послідовності операцій, які повторюються при нормальному виконанні процесу, і нерегулярні послідовності, що виникають при аварійних і інших ситуаціях на об’єкті, коли роботу системи треба припинити з попереднім переводом об’єкта в деякий фіксований стан.
Структурна схема системи управління циклічним процесом приведена на рис.3.11, де ПУк, ПУн, ЧП – відповідно пристрій управління циклічним режимом, пристрій управління налагоджуваним режимом та часовий пристрій для відробки витримки часу.
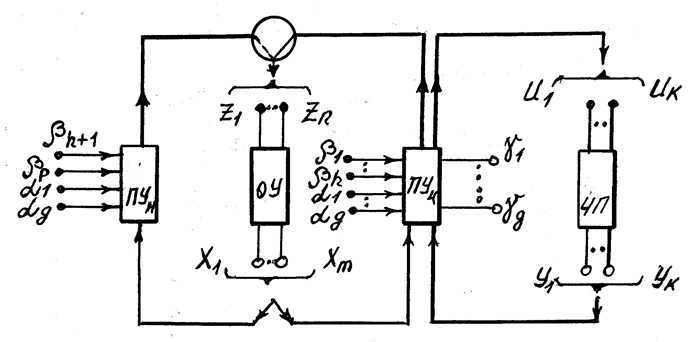
Рис.3.11. Структурна схема дискретної системи управління для процесів без паралельних послідовностей.
Часовий пристрій, виконується як частина управляючого пристрою, але по своїм функціям він є виконавчим органом.
При синтезі системи управління циклічними процесами будемо користуватися такими позначеннями(рис.3.11):
 - сигнали від датчиків, що контролюють стан виконавчих механізмів ОУ;
- сигнали від датчиків, що контролюють стан виконавчих механізмів ОУ;
 - вхідні сигнали на виконавчі механізми;
- вхідні сигнали на виконавчі механізми;
 - вхідні сигнали ЧП, що визначають початок підрахунку затримок часу;
- вхідні сигнали ЧП, що визначають початок підрахунку затримок часу;
 - вихідні сигнали ЧП, що засвідчують про закінчення затримок часу;
- вихідні сигнали ЧП, що засвідчують про закінчення затримок часу;
 - зовнішні вхідні сигнали, набір яких визначає реалізуєму програму та зберігається незмінним при її виконанні;
- зовнішні вхідні сигнали, набір яких визначає реалізуєму програму та зберігається незмінним при її виконанні;
 - зовнішні вхідні сигнали, які проявляються в часі виконання програми циклічного режиму викликає її переривання або роз’єднання;
- зовнішні вхідні сигнали, які проявляються в часі виконання програми циклічного режиму викликає її переривання або роз’єднання;
 - сигнали ручного управління.
- сигнали ручного управління.
В циклічному режимі роботи системи переривається зв’язок, що іде від ПУн на ОУ. При закріпленому значенні сигналів в залежності від значення сигналів , і ПУк виробляє дію на ОУ і ЧП(сигнали , ), що характеризують операції циклічного режиму. В налагоджувальному режимі, навпаки, переривається зв’язок від ПУц на ОУ і формування значень сигналів виробляється по сигналам ручного управління  з урахуванням вихідних сигналів ОУ .
з урахуванням вихідних сигналів ОУ .
Особливість систем управління складними циклічними процесами в тому, що в ОУ одночасно виконуються декілька паралельних послідовностей технологічних операцій, які реалізуються різними виконавчими механізмами.
Література: [7],стор.169-179; [8], стор. 150-158.
Дата добавления: 2015-05-21; просмотров: 1036;