Інтегралом рівняння (1.20) при збільшені вхідного тиску стрибком від нуля до РВХ. є формула
 (1.21)
(1.21)
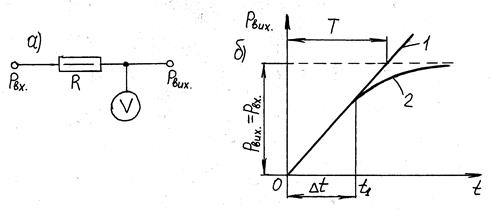
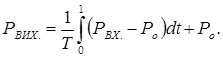
Рис.1.7. Схема (а) то крива розгону (б) що пояснює принцип роботи пасивних інтегруючих пристроїв.
Крива 2, що побудована по цьому рівнянню, показана на рис.1.7, б. Тут же показані зміни тиску на виході ідеального інтегруючого пристроя при постійному значенні вхідного сигналу. Відповідно (1.19) при постійному вхідному сигналі, що подається на вхід ідеального інтегратора
 (1.22)
(1.22)
т.ч. отримаємо рівняння прямої 1, що виходе з початку координат.
Швидкість інтегрування обернено пропорційна постійній часу інтегрування Т.
З рис.1.7, б видно, що до митті часу t1 сигнал на виході аперіодичної ланки та ідеального інтегратора змінюється в часі практично однаково, що показує на можливість інтегрування з допомогою аперіодичної ланки вхідних пневматичних сигналів в перебіг часу Δt. При збільшені часу збільшується також різниця сигналів аперіодичної ланки та ідеального інтегратора, що збільшує похибку інтегрування. Оцінити величину ΔРВИХ.(t) абсолютної похибки при зміні вхідного сигнала стрибком, можливо якщо взяти різницю сигналів (1.22) і (1.21) в одну і ту ж мить часу
Використовуя розкладення функції  в степенний ряд і взяв два перших члена розкладення, отримаємо
в степенний ряд і взяв два перших члена розкладення, отримаємо
 (1.23)
(1.23)
Величина Т визначає масштаб вихідного сигнала і її збільшення приводить до зменшення вихідного тиску. Для підсилення вихідного тиску пасивних інтегруючих пристроїв використовують пневматичні підсилювачі.
Так як тривалість інтегрування обмежена значенням Т та стабільністю підсилювача пасивні інтегруючі пристрої використовують для інтегрування сигналів тиску що швидко змінюються. Для виключення впливу на Т значень вхідних пневмоємкостей сигнал з пневмокамери подають в пневмоповторювач (рис.1.8, а). Роль повторювача може використовувати трьохмембранний підсилювач з одиничним заперечним зворотнім зв’язком (рис.1.8, б).
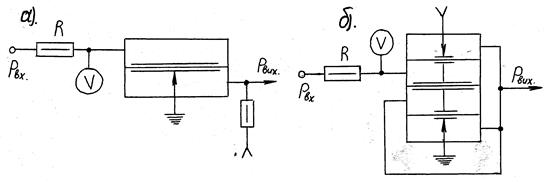
Рис.1.8. Схема пасивних пневматичних інтегруючих пристроїв.
Аналогові пневматичні інтегруючі пристрої замкненого типу.
Ці пристрої можуть бути побудовані з використанням як додатного, так і заперечного зворотнього зв’язку. Принцип додатного зворотнього зв’язку використовують при створенні інтеграторів на базі аперіодичної ланки.
Аперіодична ланка здійснює інтегрування тиску приблизно. Основною причиною похибки при цьому є те, що витрати повітря крізь пневмоопір визначається не вхідним інтегруємим тиском, а різницею вхідного і вихідного тисків. Постійну часу Т при постійній температурі θ газу представимо таким чином:
 (1.24)
(1.24)
де  - акумулюючи здібність пневмокамери об’ємом V;
- акумулюючи здібність пневмокамери об’ємом V;  - значення пневмоопору.
- значення пневмоопору.
Формулу (1.20) представим т.ч.
звідки  Інтегруя останній вираз по часу, отримаємо
Інтегруя останній вираз по часу, отримаємо
 (1.25)
(1.25)
вираз  є масові витрати σ повітря крізь пневмоопір і тому (1.25) перепишемо у вигляді
є масові витрати σ повітря крізь пневмоопір і тому (1.25) перепишемо у вигляді
Таким чином, з ростом тиску РВИХ. в пневмокамері при РВХ. = const витрати σ повітря крізь пневмоопір зменшуються. Якщо к тиску РВХ. на вході в кожну мить часу додавати тиск, що дорівнює тиску на виході, то можливо виконати точне інтегрування вхідного сигнала. Прийняв значення тиску  на вході в аперіодичну ланку
на вході в аперіодичну ланку  і підставив в (1.25) одержимо
і підставив в (1.25) одержимо
 (1.26)
(1.26)
Сумування РВХ. і РВИХ. в кожну мить часу в процесі інтегрування приводе до того, що вихідний сигнал є інтегралом від вхідного. Реалізувати сумування можливо за допомогою підсумовувала (рис.1.9, а).
На рис.1.9, б, в показані найбільш розповсюджені схеми інтеграторів з мембранним підсумовувачем (рис.1.9, б – чотирьохвходовим, рис.1.9, в – трьохвходовом підсилювачах).
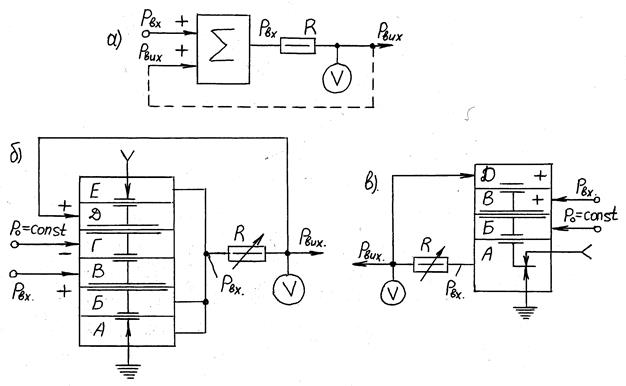
Рис.1.9. Схеми пневматичних інтегруючих пристроїв замкненого типу з додатнім зворотнім зв’язком.
Принцип заперечного зворотнього зв’язкувикористовується для створення інтеграторів на базі підсилювачів з великим коефіцієнтом підсилення та пневмоконденсаторів. Принципові схеми цих інтеграторів показані на рис.1.10, а, б. В схемі що показана на рис.1.10, а використовують двохвходовий трьохмембранний підсилювач.
Для двохвходового підсилювача в розімкненому режимі
 (1.27)
(1.27)
де Ко – коефіцієнт підсилення.
Для вузла “а” запишемо рівняння нерозривності потоків
 (1.28)
(1.28)
Витрати  крізь вхідний пневмоопір визначається як
крізь вхідний пневмоопір визначається як
 (1.29)
(1.29)
а витрати  крізь пневмоконденсатор
крізь пневмоконденсатор
 (1.30)
(1.30)
де С – ємність пневмоконденсатора.
При великом коефіцієнті підсилення підсилювача в розімкненому режимі Ра≈Ро, так як  Підставив значення Ра=Ро в (1.29) і (1.30) з врахуванням (1.28) знайдемо
Підставив значення Ра=Ро в (1.29) і (1.30) з врахуванням (1.28) знайдемо
 (1.31)
(1.31)
Вирішив (1.31) відносно РВИХ., отримаємо
 (1.32)
(1.32)
Якщо необхідно одержати операцію інтегрування без інвертірованія результата, та використовують схему що показана на рис.1.10, б. В цій схемі вихідний сигнал інтегратора РВИХ. подається на вхід інвертую чого підсилювача, коефіцієнт підсилення якого дорівнює одиниці.
 (1.33)
(1.33)
Рис.1.10. Схеми пневматичних інтегруючих пристроїв замкненого типа з заперечним зворотнім зв’язком.
Аналогові пневматичні диференцюючі пристрої.
Використовують для реалізації різних законів регулювання та виконання часових операцій. Залежність між вхідним РВХ. і вихідним РВИХ. сигналами диференцюючого пристроя має вигляд
 (1.33)
(1.33)
де К – коефіцієнт підсилення диференціатора.
Аналогові диференцюючі пристрої розподіляють на пристрої розімкненого та замкненого типа в залежності від того використовується чи ні в схемі пристроя заперечний зв’язок.
Диференцюючі пристрої розімкненого типу.
Для використання операції диференціювання необхідно вимірювати витрати повітря крізь пневмоопір, який є функцією швидкості зміни вхідного тиску. Вимірювання витрат зручно здійснювати по перепаду тиску на опорі R, який буде в даному випадку вихідним сигналом диференціатора, 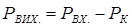 (рис.1.11, а).
(рис.1.11, а).
Рис.1.11. Схема (а) та часові характеристики (б-г) що пояснюють принцип дії пасивного пневматичного диференцюючого пристроя.
Коли тиск РК в пневмоємкості дорівнює тиску РВХ., витрати повітря крізь пневмоопір R дорівнює нулю. При зміні стрибком тиску РВХ. крізь опір R починає протікати повітря, витрати якого стають рівними нулю тільки після деякого часу, коли тиск РК буде дорівнювати тиску РВХ..
Зміни тиску РК виражаються диференційним рівнянням аперіодичної ланки
 (1.34)
(1.34)
Представив в (1.34) РК у вигляді РК = РВХ. – РВИХ., отримаємо
 (1.35)
(1.35)
Величину Т, що дорівнює RC, називають часом диферецювання. Інтегрування (1.34) при зміні вхідного сигнала стрибком приводе до виразу
 (1.36)
(1.36)
При зміні вхідного сигнала стрибком, коли тиск РК = 0, тиск РВИХ. миттєво збільшується до тиску РВХ. (рис.1.11, г). Далі починає зростати тиск РК (рис.1.11, в), як в звичайній аперіодичній ланці, по експоненті і перепад тиску на пневмоопорі R падає по експоненті (рис.1.11, г). Для того щоб наблизити реакцію реального диференцюючого пристроя на стрибковий вхідний сигнал до реакції на нього ідеального диференцюючого пристроя необхідно зменшити постійну часу Т. Зміна величини Т в цьому випадку приводе до зменшення тиску РВИХ., що робить складним використання.
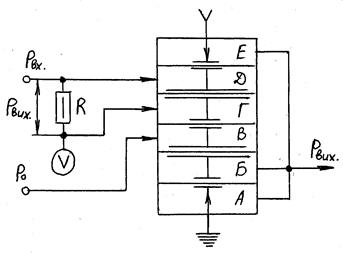
Рис.1.12. Схема пасивного аналогового пневматичного пристроя.
В схемі (рис.1.12) показан пасивний диференцюючий пристрій з мембранним суматором. Суматор зібран на чотирьохвходовом підсилювачі і служить для вимірювання перепаду тиску в камерах Д і Г мембранний блок зміщується відносно верхнього або нижнього сопла підсумовувала. На виході є сигнал, пропорційний перепаду тисків в камерах Д і Г. В камеру В подається тиск Ро, що відповідає нульовому рівню.
Аналогові пневматичні диференцюючі пристрої замкненого типу.
Диференцюючі пристрої розімкнутого типу не забезпечують високу точність виконання операції диференціювання із-за присутності члена  Похибка роботи пасивних пристроїв виникає із-за того, що в процесі диференціювання витрати повітря в пневмоємкості створюються не вхідним тиском, а перепадом тисків РВХ. – РК , є джерелом методичної похибки диференціювання. Компенсувати цю похибку можливо якщо подати вихідний тиск на вхід схеми. Дійсно, з (1.35) отримаємо
Похибка роботи пасивних пристроїв виникає із-за того, що в процесі диференціювання витрати повітря в пневмоємкості створюються не вхідним тиском, а перепадом тисків РВХ. – РК , є джерелом методичної похибки диференціювання. Компенсувати цю похибку можливо якщо подати вихідний тиск на вхід схеми. Дійсно, з (1.35) отримаємо
 (1.37)
(1.37)
Якщо до тиску РВХ. кожну мить додавати тиск РВИХ. т.ч. маємо  , то (1.37) має вигляд
, то (1.37) має вигляд
 (1.38)
(1.38)
Таку операцію можливо виконувати за допомогою додатного зворотнього зв’язку.
Принцип додатного зворотнього зв’язку в схемі пневматичного диференціатора показан на рис.1.13. Вхідний сигнал поступає на пасивний диференціатор крізь суматор, де до значення цього сигнала додається значення вихідного сигнала усього пристроя, т.ч. пасивний диференціатор охоплен додатнім зворотнім зв’язком.
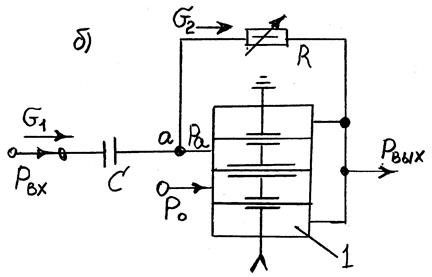
Рис.1.13.
Пневматичні пристрої предваренія.
В пневмоавтоматиці одержали широке застосування пристрої предваренія. Вони використовуються при конструюванні пневматичних регуляторів та реалізують операцію
 (1.39)
(1.39)
де Тn – час предваренія (постійна часу диференціювання).
Пристрої предваренія будують або на базі пасивних диференціаторів, або на базі пневматичного підсилювача з великим коефіцієнтом підсилення, що охоплен заперечним зворотнім зв’язком.
На рис.1.14, а показан пристрій предваренія що реалізован на базі двохвходового підсилювача, в заперечний зворотній зв’язок якого включена аперіодична ланка (пневмоємкість V та пневмоопір R). Рівновага підсилювача буде в тому випадку, коли тиски в камерах Б і В однакові. Тиск в камері В дорівнює РВХ., а тиск в камері Б це диференційне рівняння аперіодичної ланки, т.ч.  де Т – постійна часу аперіодичної ланки. Враховуючи, що при великому коефіцієнті підсилення підсилювача РБ = РВ = РВХ., останній вираз перепишемо у вигляді
де Т – постійна часу аперіодичної ланки. Враховуючи, що при великому коефіцієнті підсилення підсилювача РБ = РВ = РВХ., останній вираз перепишемо у вигляді 
Час предваренія можливо змінювати шляхом зміни провідності змінного пневмоопора R.
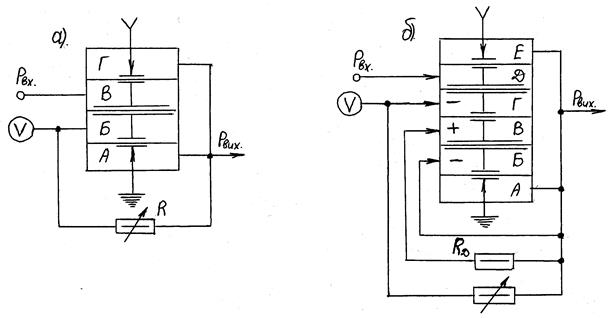
Рис.1.14. Схеми пневматичних пристроїв предваренія.
В такій схемі виникають незатухаючі автоколивання. Тому часто використовують схему що виконана на базі 4-х входового підсилювача (рис.1.14, б). Аперіодична ланка в цій схемі включена в заперечний зворотній зв’язок підсилювача. Крім того, підсилювач охоплен одиничним додатнім зв’язком крізь пневмоопір RД , що виконує демфіруючу функцію.
Література: [8] стор.151-154; [3] стор.199-215.
Лекція 4. Аналогові універсальні функціональні перетворювачі без методичної похибки. Функціональні перетворювачі з методичною похибкою; мембранні функціональні перетворювачі з шматково-лінійною апроксимацією.
Функціональні перетворювачі – розрахункові пристрої, що служать для відтворення елементарних нелінійних залежностей вигляда  . Якщо реалізуємо функціональним перетворювачем залежність може бути змінена за рахунок перерахування параметрів без зміни конструкції перетворювача, то такі функціональні перетворювачі володіють властивістю універсальності з точки зору класу відтворюваних нелінійних залежностей і називаються універсальними функціональними перетворювачами. Функціональні перетворювачі які не мають таких влстивостей та відтворюють функцію тільки одного виду, називають спеціалізованими функціональними перетворювачами.
. Якщо реалізуємо функціональним перетворювачем залежність може бути змінена за рахунок перерахування параметрів без зміни конструкції перетворювача, то такі функціональні перетворювачі володіють властивістю універсальності з точки зору класу відтворюваних нелінійних залежностей і називаються універсальними функціональними перетворювачами. Функціональні перетворювачі які не мають таких влстивостей та відтворюють функцію тільки одного виду, називають спеціалізованими функціональними перетворювачами.
По методу відтворення заданої функції універсальні перетворювачі розподіляють на перетворювачі: а) що роблять без методичної похибки; б) що роблять з методичною похибкою.
Перші точно реалізують функції але складні по конструкції.
Перетворювачі, що роблять з методичною похибкою, теоретично точно відтворюють деяку функцію  , яка приблизно з потрібною точністю апроксимує задану функцію
, яка приблизно з потрібною точністю апроксимує задану функцію  .
.
Універсальні функціональні перетворювачі без методичної похибки.
Кулачкові функціональні перетворювачі (рис.1.15) найбільш розповсюджені. Тиск  , що перетворюється, подається в сильфон 1, який перетворює цей тиск в пропорційне лінійне зміщення штока 2. Пристрій 4 здійснює перетворення лінійного зміщення штока 3в кут повертання осі 5 з кулачком 6. Профіль кулачка, по якому котиться ролик 7, вибирають відповідно з заданій функціональною залежністю між
, що перетворюється, подається в сильфон 1, який перетворює цей тиск в пропорційне лінійне зміщення штока 2. Пристрій 4 здійснює перетворення лінійного зміщення штока 3в кут повертання осі 5 з кулачком 6. Профіль кулачка, по якому котиться ролик 7, вибирають відповідно з заданій функціональною залежністю між  і
і  . При повертанні кулачка 6 повертається також важіль 8, що змінює степінь натяжіння пружини 9. Сила
. При повертанні кулачка 6 повертається також важіль 8, що змінює степінь натяжіння пружини 9. Сила  , що виникає від деформації пружини, діє через важіль 10 на перетворювач 12, вихідний сигнал
, що виникає від деформації пружини, діє через важіль 10 на перетворювач 12, вихідний сигнал  якого врівноважує силу
якого врівноважує силу  на мембрані 11.
на мембрані 11.
Рівняння пристроя 4, що перетворює вхідний тиск в кут повертання кулачка  , має вигляд:
, має вигляд:
 , (1.40)
, (1.40)
де  - коефіцієнт перетворювача який залежить від ефективної площі сильфона та жорсткості пружини.
- коефіцієнт перетворювача який залежить від ефективної площі сильфона та жорсткості пружини.
Залежність кута  повертання важеля 8 від кута
повертання важеля 8 від кута  повертання кулачка 6 визначається профілем кулачка і може бути записана:
повертання кулачка 6 визначається профілем кулачка і може бути записана:
 . (1.41)
. (1.41)
Нижній кінець пружини 9 при повертанні кулачка зміщується по дузі, довжина якої  . Так як кут повертання
. Так як кут повертання  малий, то рахуєм, що сила
малий, то рахуєм, що сила  лінійно залежить від кута повертання важеля 8:
лінійно залежить від кута повертання важеля 8:
 (1.42)
(1.42)
де  - жорсткість пружини.
- жорсткість пружини.
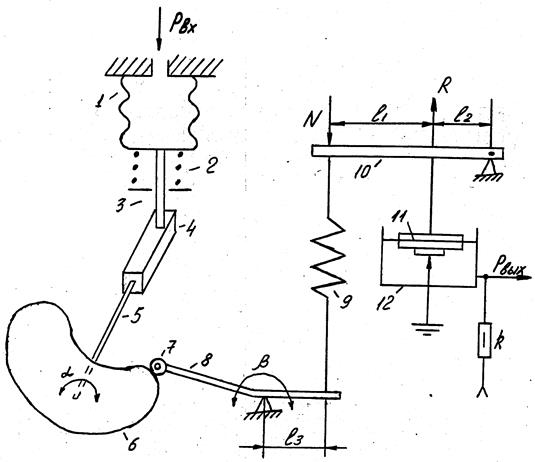
Рис.1.15. Схема кулачкового функціонального перетворювача.
Сила, що передає на мембрану 11 при розтяжінні пружини 9, зв’язана з силою :
 . (1.43)
. (1.43)
Тиск пневматичного перетворювача, що створює на мембрані 11 врівноважуюче зусилля:
 (1.44)
(1.44)
де  - ефективна площа мембрани 11.
- ефективна площа мембрани 11.
З (1.40) - (1.44) знайдемо:
Якщо залежність, яку повинен реалізувати функціональний перетворювач, задана у вигляді  , то функцію
, то функцію  , що визначає профіль кулачка, через задану функцію можливо визначити таким чином:
, що визначає профіль кулачка, через задану функцію можливо визначити таким чином: 
Функціональні перетворювачі з методичною похибкою.
Дія функціональних перетворювачів з методичною заснована на шматково-лінійній, шматково-нелінійній та нелінійній апроксимації заданої функції. Універсальні функціональні перетворювачі, що роблять по методу шматково-лінійної апроксимації, відтворюють шматково-лінійну функцію  , якою замінюється функція
, якою замінюється функція  , що підлягає реалізації(рис.1.16).
, що підлягає реалізації(рис.1.16).
При шматково-лінійної апроксимації нелінійної функції  необхідно відшукати параметри шматково-лінійної апроксимації
необхідно відшукати параметри шматково-лінійної апроксимації  таким чином, щоб у всьому діапазоні зміни аргумента дотримувалася нерівність
таким чином, щоб у всьому діапазоні зміни аргумента дотримувалася нерівність  де
де  - допустима похибка апроксимації.
- допустима похибка апроксимації.
Точність апроксимації там більше, чим більше відрізків, на яка розбита вісь абсцис. Але збільшення точності приведе до збільшення елементів, що складають функціональний перетворювач та зменшує його надійність.
При конструюванні перетворювачів задану функцію  апроксимують шматково-лінійною функцією вигляду:
апроксимують шматково-лінійною функцією вигляду:
 (1.45)
(1.45)
де  - текуче значення вхідного тиску;
- текуче значення вхідного тиску;  - абсциса і-го проміжку розбієнія;
- абсциса і-го проміжку розбієнія;
 - ордината функції
- ордината функції  для
для 
 ;
;  - кутовий коефіцієнт прямої на і-му проміжку апроксимації.
- кутовий коефіцієнт прямої на і-му проміжку апроксимації.
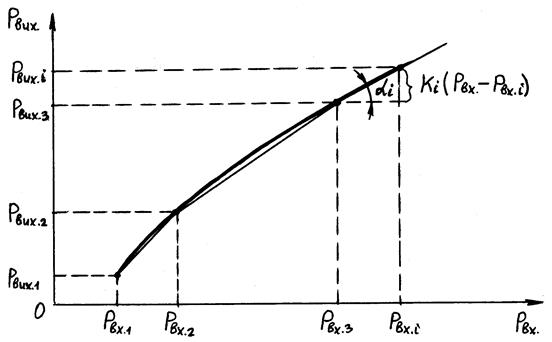
Рис. 1.16. Шматкова апроксимація нелінійної функції.
Апроксимація відбувається таким чином, що кожній точці значення функції складається з значення  на даному відрізку і відстані від цього значення до нахиленої апроксимуючої прямої. На кожному відрізку апроксимації робить тільки один пристрій функціонального перетворювача, що визначає нахил прямої на і-м відрізки а всі другі пристрої в цей час відключені.
на даному відрізку і відстані від цього значення до нахиленої апроксимуючої прямої. На кожному відрізку апроксимації робить тільки один пристрій функціонального перетворювача, що визначає нахил прямої на і-м відрізки а всі другі пристрої в цей час відключені.
Мембранні функціональні перетворювачі з шматково-лінійною апроксимацією.
Для функцій, у яких з збільшенням аргументу значення похідної зменьшується, а сама функція збільшується, можливо використати інший принцип реалізації шматково-лінійної апроксимації.
Розбиває показано на рис.1.16 функцію на участки та замінює її в межах кожного участка прямою, бачимо що пряма має менші ординати, ніж прямі, що апроксимують другі участки.
Таким чином, для таких функцій при наявності апроксимуючих пристроїв для кожного участка підключення їх до виходу функціонального перетворювача можливо здійснити не по значенню вхідного сигнала, а підключенням того апроксимуючого пристроя, який має найменший вихідний сигнал. Схема перетворювача що реалізує цей принцип показана на рис.1.17. Він складається з трьох повторювачів з зсувом(  ); двох суматорів
); двох суматорів  і
і  на пневмоопорах; задатчика 3, точного повторювача, зібраного на двовходному підсилювачі; підсилювача потужності.
на пневмоопорах; задатчика 3, точного повторювача, зібраного на двовходному підсилювачі; підсилювача потужності.
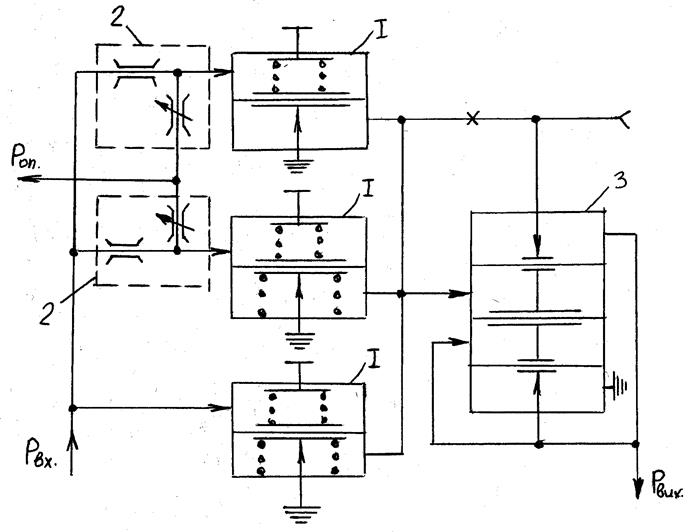
Рис.1.17.
Для відтворення апроксимуючих прямих 2 і 3 використовують повторював  з суматором
з суматором  та повторювачем
та повторювачем  з суматором
з суматором  (рис.1.17). Так як початковий участок кривої апроксимується прямою 1 з нахилом
(рис.1.17). Так як початковий участок кривої апроксимується прямою 1 з нахилом  ( це роблять при налагодженні перетворювача для реалізації функції
( це роблять при налагодженні перетворювача для реалізації функції  ) то для відтворення прямої 1 вхідний тиск перетворювача подається безпосередньо на повторював
) то для відтворення прямої 1 вхідний тиск перетворювача подається безпосередньо на повторював  .
.
Рівняння прямих 1-3 відповідно мають вигляд:

 (1.46)
(1.46)
 ,
,
де  та
та  - кутові коефіцієнти прямих 2 і 3.
- кутові коефіцієнти прямих 2 і 3.
Для тисків на виходах з повторювачів  відповідно запишемо:
відповідно запишемо:
 (1.47)
(1.47)
 (1.48)
(1.48)
 , (1.49)
, (1.49)
де  ;
;  і
і  - значення зсувів тиску, що створюється повторювачами
- значення зсувів тиску, що створюється повторювачами  ;
;  - опорний тиск на виході за датчика
- опорний тиск на виході за датчика  - провідності пневмоопорів.
- провідності пневмоопорів.
Зрівнявши відповідні рівняння системи (1.46) з рівняннями (1.47),(1.48) і (1.49), отримаємо:

По відомим з графіка функції значенням  виконують налагодження провідностей опорів суматорів і розраховують зсуви
виконують налагодження провідностей опорів суматорів і розраховують зсуви  повторювачів і опорний тиск
повторювачів і опорний тиск  від за датчика 3.
від за датчика 3.
Підключення повторювачів до вихідної лінії 1 відбувається таким чином. Якщо тиск на вході  , то тиск на виході повторювача
, то тиск на виході повторювача  буде менше, ніж тиск в верхніх камерах повторювачів
буде менше, ніж тиск в верхніх камерах повторювачів  . Тому в лінії 1 встановлюється тиск, що визначається повторювачем
. Тому в лінії 1 встановлюється тиск, що визначається повторювачем  , а повторювані
, а повторювані  зачинені. Коли тиск на вході стає рівним
зачинені. Коли тиск на вході стає рівним  , відчиняється також і повторювач
, відчиняється також і повторювач  . При збільшенні тиску
. При збільшенні тиску  далі, т.б. коли
далі, т.б. коли 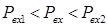 , тиск в лінії 1 буде визначатися повторювачем
, тиск в лінії 1 буде визначатися повторювачем  , а повторювані
, а повторювані  зачинені. Таким чином відбувається підключення повторювача
зачинені. Таким чином відбувається підключення повторювача  .
.
Промислові функціональні перетворювачі, при стандартному діапазоні вхідних тисків, реалізують залежність:
 (1.50)
(1.50)
Література: [1],стор. 47-49; [3], стор. 219-224; [7], стор. 42-44.
Лекція 5. Струменеві функціональні перетворювачі з шматково-лінійною апроксимацією. Аналогові пневматичні множу вальні та ділильні пристрої.
Перетворювачі (рис.1.18) складаються з таких елементів апроксимуючих пристроїв АП1 – АПn які призначені для апроксимації окремих відрізків нелінійної функції прямими; пристроїв зміщення ПЗ1 – ПЗn які здійснюють включення окремих апроксимуючих пристроїв по досягненню відповідного значення вхідного сигнала; інвертуючи пристроїв ІП, що дозволяють апроксимувати функції які мають заперечну похідну сумуючого пристроя, що здійснює сумування всіх сигналів апроксимуючих та інвертуючи пристроїв.
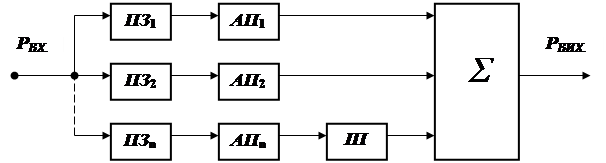 |
Рис.1.18. Схема струменевого функціонального перетворювача з шматково-лінійною апроксимацією.
Апроксимуючий пристрій АПі що відтворює просту лінійну залежність, складається з двох струменевих підсилювачів (рис.1.19, а). Тиск живлення РЖИВ. Поступає крізь змінний пневмоопір R2 до сопел живлення 1 та 4 першого і другого підсилювачів. Тиск РВХ. крізь змінний пневмоопір R1 подається до сопла 3 першого підсилювача. При відсутності вхідного сигнала потік повітря, що виходе з сопла 1, поступає в прийомний канал 2 першого підсилювача, з’єднаний з соплом 6 другого підсилювача. Повітря витікає з управляючого сопла 6 другого підсилювача, відхиляє потік повітря, що виходе з сопла 4. Параметри відхиляючого потока підібрані так, що в вихідне сопло 5 другого підсилювача повітря не поступає і тиск в ньому дорівнює нулю. При наявності сигнала на вході зменшується тиск приємному каналі 2 першого підсилювача за рахунок відхилення основного струменя повітря управляючим струменем, зменьшуя також тиск і в управляючому соплі 6 другого підсилювача. На вході другого підсилювача з’являється сигнал, так як струмень повітря, що тече з управляючого сопла 6, вже неповністю відхиляє потік, який тече з сопла 4. Якщо вхідний тиск збільшується далі то на виході апроксимуючого пристроя тиск також збільшується. Коли струмінь, що тече з управляючого сопла 3 першого підсилювача, відхиляє струмінь який тече з сопла живлення 1 цього ж підсилювача, настільки, що тиск в його приємному соплі 2 і відповідно в управляючому соплі 6 другого підсилювача дорівнює нулю, і струмінь що тече з сопла живлення 4 підсилювача, повністю поступає в прийомний канал 5 цього підсилювача і тиск на виході апроксимуючого пристроя стає максимально можливим для прийнятого тиску живлення і провідності опору R2.
Якщо вхідний тиск РВХ. змінюється далі то тиск на виході буде залишатися постійним, тому що при збільшенні РВХ. тиск в прийомному каналі 2 і управляючому соплі 6 дорівнює нулю. Змінні пневмоопори R1 та R2 дозволяють налагоджувати параметри пристроя відповідно з апроксимуючим відрізком даної функції.
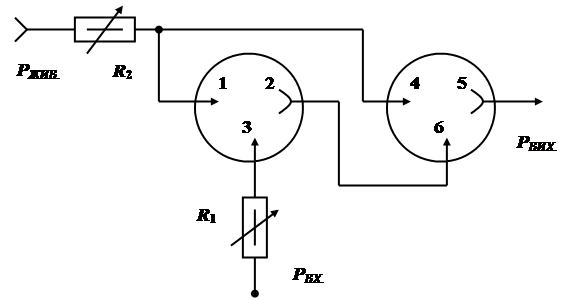
Рис.1.19. Схема струменевого функціонального перетворювача.
Аналогові пневматичні множу вальні та ділильні пристрої.
Для вирішування багатьох задач автоматизації виробничих процесів необхідно множити або ділити пневматичні сигнали. Для виконання цих операцій використовують аналогові множу вальні та ділильні пристрої. Загальний вираз, що реалізують пневматичні множу вальні та ділильні пристрої, має вигляд:
 (1.51)
(1.51)
де А – постійний крефіціент; Рі і Рj – тиски.
Відтворення (1.51) забезпечується звичайним каскадним з’єднанням пристроїв, що виконують прості операції слідую чого вигляду:
 (1.52)
(1.52)
 (1.53)
(1.53)
 (1.54)
(1.54)
По реалізації добутку знакозмінних співмножників відрізняють чотирьох-, двох- і одноквадратні множу вальні пристрої. Усі пневматичні множу вальні пристрої – одноквадратні. Така класифікація ділильних пристроїв не має реакції, так як при переході ділителя крізь нуль приватне обертається в нескінченність, що не може бути реалізовано в жодній фізичній системі. Тому, маючи на увазі ділильні пристрої, можливо казати тільки о можливості зміни знака ділителя.
По алгоритму роботи усі множу вальні та ділильні пристрої можливо розподіляти на пристрої прямої та косвенної дії. В пристроях прямої дії операція множення або ділення створюється шляхом безпосереднього множення та ділення аналогів вхідних величин. В пристроях косвенної дії операція множення або ділення відбувається в результаті виконання других математичних дій. Наприклад, при виконанні операції множення в косвенних умовах звичайно беруть залежність
 (1.55)
(1.55)
Література: [3] стор.229-234; [7] стор.236-242.
Дата добавления: 2015-05-21; просмотров: 1406;