З формули (2) знаходимо
або
 (1.3)
(1.3)
Такий сумуючий пристрій виконує операцію множення вхідних сигналів на постійний коефіцієнт з послідуючим сумуванням.
В промислових системах пневмоавтоматики за стандартний робочій діапазон прийнятий діапазон тисків 0,02-0,1МПа. В сильфонному сумуючому пристрої передбачена можливість віднімання з усіх вхідних тисків сигнала 0,02МПа, що не несе інформацію. Це робиться натягом сильфонів за допомогою пружин.
Операція що реалізує такий підсумовував має вигляд:
 (1.4)
(1.4)
Приведена похибка підсумовувала складає ± 2%.
В пневмоавтоматиці більше використовують мембранні сумуючі пристрої, які мають менші габаритні розміри, більш просту конструкцію та достатньо високу точність.
Для сумування пневматичних сигналів широко використовують чотирьохвходві підсилювачі, що входять в УСЕППА, та трьохвходові підсилювачі спеціальної системи елементів пневмоавтоматики.
Схема включення чотирьохвходового підсилювача в режим сумування показан на рис.1.3, а. Така схема підсилювача відрізняється від звичайної тим, що в одну з заперечних камер, наприклад в камеру Б, підводиться тиск з вихода підсилювача, т.ч. підсилювач охоплен одиничним заперечним зворотнім зв’язком. В такому режимі зусилля на штоці, що створюється дією тисків Р1 – Р3 на мембрани, компенсується зусиллям яке створює друга мембрана під дією тиску РВИХ.. Умова рівноваги зусиль на мембранному блоці

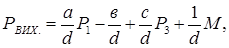
Вирішуючи цей вираз відносно РВИХ. знайдемо
 (1.5)
(1.5)
Похибка виконання операції алгебраїчного сумування складає ± 1%.
За допомогою цього підсумовувала можливо виконувати операцію ділення вхідних сигналів Р1 або Р3 на два, або операцію усереднення сигналів Р1 і Р3. Підсумовував виконує також операцію множення вхідного сигнала на 2.
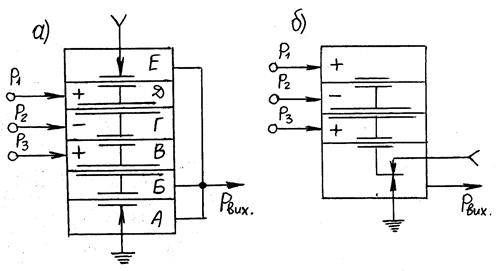
Рис.1.3. Схеми пневматичних мембранних сумуючих пристроїв.
Схема включення трьохвходового підсилювача спеціальної системи пневмоавтоматики для виконання операції сумування показана на рис.1.3, б. Цей підсилювач має спеціальну конструкцію призначену для виконання операції сумування. Умова рівноваги зусиль на мембранному блоці має вигляд:
 (1.6)
(1.6)
звідки, при F=2f вихідний тиск:
 (1.7)
(1.7)
Аналогові пневматичні сумуючі пристрої на пневмоопорах.
Для сумування пневматичних сигналів в багатьох приборах та пристроях пневмоавтоматики застосовують підсумовувачі виконані на ламінарних пневмоопорах.
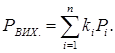
В пневмоавтоматиці застосовують як пасивні підсумовувачі на пневмоопорах, так і підсумовувачі на пневмоопорах з підсилювачами. Пасивний підсилювач на пневмоопорах являє собою пневматичну проточну камеру, в якій крізь деякі опори подаються тиски що сумуються. Тиск РК в камері є вихідним тиском РВИХ. підсумовувала і зв’язан з сумою вхідних тисків Рі формулой
 (1.8)
(1.8)
де ki – проводимість пневмоопорів.
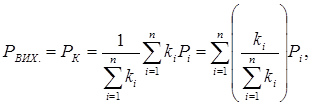
Вираз (1.8), при відсутності різниці між вхідними і вихідними опорами, має вигляд, якщо прийняти 
 (1.9)
(1.9)
Так як в цих підсумовувачах завжди ki < 1, то підсумовував може виконувати операцію звичайного сумування.
Підсумовувач на пневмоопорах з двохвходовим підсилювачем показан на рис.1.4. Тиск РК в камері В підсилювача підтримується постійним і не рівним нулю. Щоб цей пристрій міг виконувати операцію сумування, необхідно забезпечити умови при яких крізь усі пневмоопори міг би проходити як приток, так і відток повітря.
Враховуючи, що камера Б проточна і підключені до неї пневмоопори є пасивним підсумовувачем, тиск РБ в камері Б дорівнює:
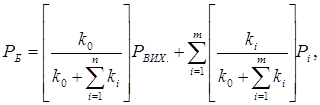 (1.10)
(1.10)
де k0 – провідність пневмоопора заперечного зворотнього зв’язку.
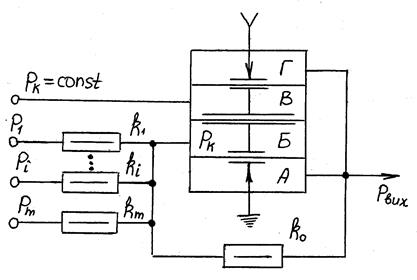
Рис.1.4. Схема пневматичного підсилювача на пневмоопорах.
Так як пневматичний підсилювач має дуже великий коефіцієнт підсилення, то в рівновісному стані тиск в камері Б практично завжди дорівнює тиску в камері В. Підставив в (1.10) замість РБ значення тиску, що дорівнює РВ = РК і його відносно РВИХ. знаходимо
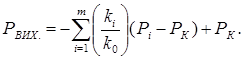 (1.11)
(1.11)
Таким чином, підсумовувач може виконувати операцію сумування пневматичних сигналів з попереднім множенням на постійний коефіцієнт  (0<ki <∞).
(0<ki <∞).
Література: [1] стор.41-43; [3] стор.177-188.
Дата добавления: 2015-05-21; просмотров: 1052;