Лекція 12. Пневматичні регулятори з змінним коефіцієнтом підсилення в залежності від знака відхилення параметра та його похідної. Полу пропорційний пневматичний регулятор.
Для поліпшення якості регулювання використовують регулятори з змінним налагоджуванням та змінною структурою.
На рис.3.5 приведена пропорційного регулятора, коефіцієнт підсилення якого може приймати два визначених значення в залежності від знака відхилення параметра і його похідної. Застосування такого алгоритма регулювання складається у слідую чому. Коли знаки параметра і похідної збігаються (рис.3.5, б, ділянки 1 і 3) параметр відхиляється від заданого значення і в цю мить коефіцієнт підсилення К1 регулятора беруть більшим. Коли знаки параметра і похідної не збігаються (рис.3.5, б, ділянки 2 і 4), це означає, що параметр вертається до заданого значення. Тому використовують менший коефіцієнт підсилення К2 і послабити дію регулятора на об’єкт.
Зміна коефіцієнтів підсилення К1 і К2 в регуляторі здійснюється логічним пристроєм 3 (рис.3.5, а) шляхом подачі команди РК до реле, яке підключає змінні пневмоопори R1 і R2 регулятора. Формування логічним пристроєм командного сигнала “0” або “1” залежить від знаків відхилення і похідної параметра. Селекцію знака відхилення параметра здійснює реле Р1, а знака похідної – реле Р2. На вхід реле Р1 поступає сигнал  від підсумовувала П-регулятора та постійний сигнал Рпоч. початкового рівня від задатчика 2, а на вхід реле Р2 – постійний сигнал Рпоч. і сигнал РД з вихода диференціатора 1:
від підсумовувала П-регулятора та постійний сигнал Рпоч. початкового рівня від задатчика 2, а на вхід реле Р2 – постійний сигнал Рпоч. і сигнал РД з вихода диференціатора 1:

Коли Рn > P3 і  (рис.3.5, б, ділянка 1), тиск Ра = 1 і Рб = 1. В цьому випадку логічний пристрій за допомогою елемента АБО, реле Р3 і Р4 відробляє на вихід сигнал РК = 1, реле Р5 підключає пневмоопір R1 і регулятор робе з більшим коефіцієнтом підсилення К1. При Рn < P3 і
(рис.3.5, б, ділянка 1), тиск Ра = 1 і Рб = 1. В цьому випадку логічний пристрій за допомогою елемента АБО, реле Р3 і Р4 відробляє на вихід сигнал РК = 1, реле Р5 підключає пневмоопір R1 і регулятор робе з більшим коефіцієнтом підсилення К1. При Рn < P3 і  (рис.3.5, б, ділянка 3), тиск Ра=0 і Рб = “0”, а на виході логічного пристроя буде сигнал РК = 1, т. ч. регулятор і на цій ділянці робе з більшим коефіцієнтом підсилення. При Рn > P3 і (рис.3.5, б, ділянка 2) на виході реле Р1 відробляється сигнал Ра = 1, а на виході реле Р2 – сигнал Рб = “0”. На ділянці 4 (рис.3.5, б) Ра = “0” і Рб = “1”. В останніх двох випадках на вході логічного пристроя буде тиск РК = “0”, а на реле Р5 підключає пневмоопір R2 і відключає пневмоопір R1, т. ч. регулювання відбувається з малим коефіцієнтом підсилення К2.
(рис.3.5, б, ділянка 3), тиск Ра=0 і Рб = “0”, а на виході логічного пристроя буде сигнал РК = 1, т. ч. регулятор і на цій ділянці робе з більшим коефіцієнтом підсилення. При Рn > P3 і (рис.3.5, б, ділянка 2) на виході реле Р1 відробляється сигнал Ра = 1, а на виході реле Р2 – сигнал Рб = “0”. На ділянці 4 (рис.3.5, б) Ра = “0” і Рб = “1”. В останніх двох випадках на вході логічного пристроя буде тиск РК = “0”, а на реле Р5 підключає пневмоопір R2 і відключає пневмоопір R1, т. ч. регулювання відбувається з малим коефіцієнтом підсилення К2.
Полупропорційний пневматичний регулятор.
Безперервні і імпульсні регулятори при відхиленні регулюючої величини від заданого значення формує регулюючу дію в залежності від відхилення параметра від заданого значення або від швидкості його зміни. Регулятори продовжують змінювати положення виконавчого механізму і тоді, коли регулюючий параметр вже вертається до заданого значення (т. б. тоді коли в цьому вже нема необхідності). Можливо сформувати алгоритм дії регулятора т. ч.
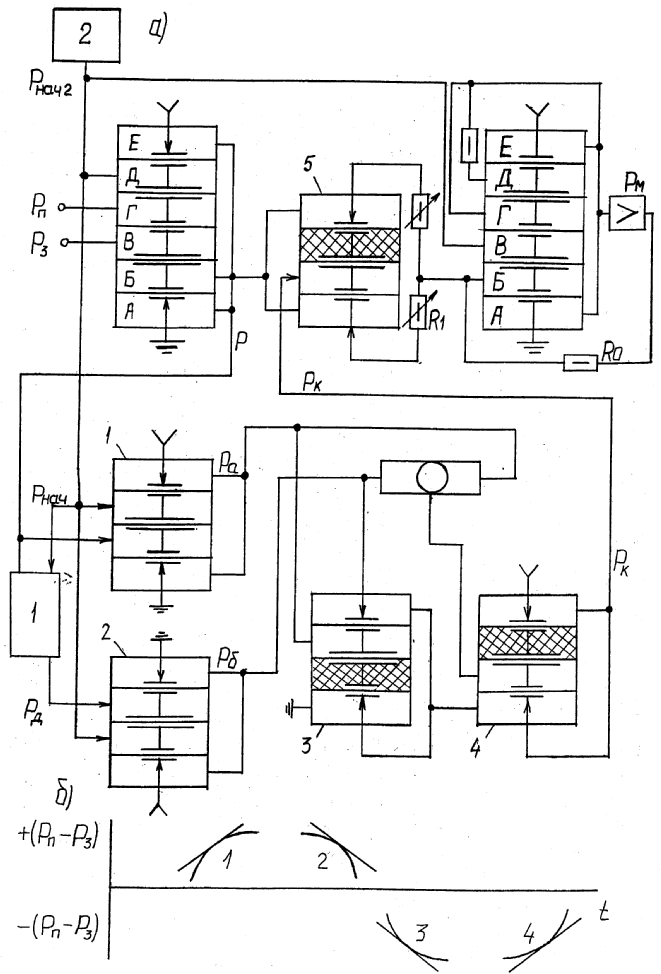
Рис.3.5.
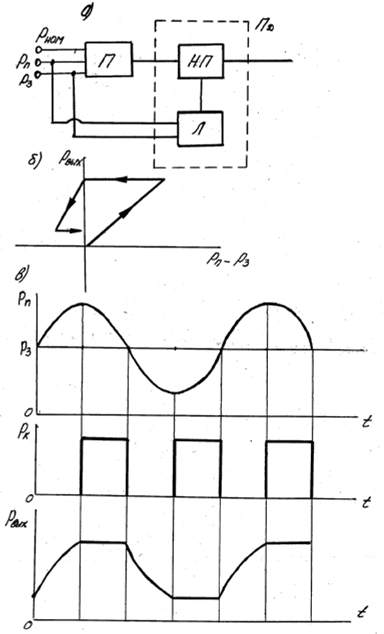
Рис.3.6.
щоб останній діяв на об’єкт в мить удалення регулюючого параметра від заданого значення і припиняв свою дію, коли параметр починає приближатися до заданого значення. Такі регулятори називають полупостійно працюючими регуляторами. Схема найбільш простого регулятора, полу пропорційного показана на рис.3.6, а. Регулятор складається з П-регулятора безперервної дії П і полупостійно працюючого пристроя ПД, який в свою чергу, складається з логічного пристроя Л і пристроя безперервної пам’яті НП вихідного сигнала регулятора. На рис.3.6, б, в показана зміна вихідного сигнала полупропорційного регулятора при подачі на його вхід змінюючогося сигнала Рn. Коли регулююча величина Рn відхиляється від заданного значення Р3, логічний пристрій пропускає крізь пристрій безперервної пам’яті НП сигнал П-регулятора на вихід, де він змінюється пропорційно відхиленню т. ч.  де К – коефіцієнт підсилення безперервного П-регулятора. Як тільки величина Рn наближається до заданого значення, логічний пристрій Л виробляє імпульс, по якому пристрій безперервної пам’яті запам’ятовує значення вихідного сигнала регулятора, який є в цю мить часу.
де К – коефіцієнт підсилення безперервного П-регулятора. Як тільки величина Рn наближається до заданого значення, логічний пристрій Л виробляє імпульс, по якому пристрій безперервної пам’яті запам’ятовує значення вихідного сигнала регулятора, який є в цю мить часу.
Література: [1] стор.130-132; [3] стор.457-464; [7] стор.105-108.
Дата добавления: 2015-05-21; просмотров: 1393;