Метод кривой реакции
Метод кривой реакции или переходной характеристики — это способ настройки с разомкнутым контуром, предложенный Циглером и Николсом (Ziegler and Nichols). Он подразумевает графический анализ реакции контролируемой переменной на скачкообразное изменение управляемой переменной.
Рассмотрим PID-контроллер с разомкнутым контуром.

Внесем единичное скачкообразное изменение во входной параметр процесса и проанализируем его реакцию.
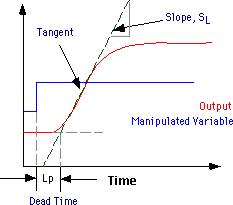
Проведем касательную линию к кривой реакции выхода в точке ее максимального уклона. Предположим, что значение данного уклона — SL. Оно представляет собой скорость измерения реакции или выхода процесса, которую следует контролировать.
Важно заметить, что уклон SLв данном случае основан на единичном скачкообразном изменении входного параметра. Другими словами, уклон, полученный по кривой реакции, следует разделить по величине скачкообразного изменения управляемой переменной.
Точка, в которой касательная линия пересекает линию исходного стабильного состояния, дает эквивалентное "мертвое" время процесса, Lp.
Теперь контроллер можно идеально настроить для получения QAD реакции, воспользовавшись следующими правилами.
Для пропорционального контроллера:
Пропорциональное усиление, KC = 1 / ( SL* Lp)
Для PI-контроллера:
Пропорциональное усиление, KC = 0,9 / ( SL* Lp)
Время интегрирования, TI = 3,33 Lp
Для PID-контроллера:
Пропорциональное усиление, KC = 1,2 / ( SL* Lp)
Время интегрирования, TI = 2,0 Lp
Время дифференцирования, TD = 0,5 Lp
Интересно отметить, что пропорциональное усиление снижается, когда прибавляется интегральное время, и увеличивается, когда прибавляется дифференциальная составляющая.
Считается, что метод кривой реакции дает более эффективные результаты настройки, чем предельный метод.
Как и в случае предельного метода, эти формулы оптимальной настройки представляют собой всего лишь практическое решение, которое обеспечивает начальную настройку. Как правило, контроллеры требуют дополнительной точной настройки на предприятии.
Пример
Возьмем в качестве примера печной агрегат и настроим контроллер температуры на выходе при помощи метода кривой реакции.
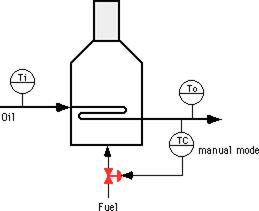
Переключим контроллер температуры на выходе в ручной режим. В момент времени t увеличим выход контроллера температуры с 50% до 55%. Допустим, что за некий период времени температура на выходе увеличивается с 300 градусов C до 350 градусов C.
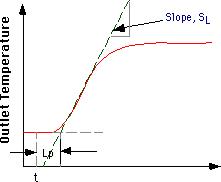
Начертим касательную линию вдоль кривой, в точке ее максимальной кривизны. Допустим, что уклон касательной линии, SL составляет 0,5 град. C/с, а "мертвое" время процесса равно 100 с.
Для вычисления постоянных настройки необходимо иметь уклон касательной линии в нормализованных единицах. Предположим, что контроллер температуры на выходе имеет диапазон измерения от 0 до 500 градусов C. Уклон в приведенных единицах для единичного скачкообразного изменения выхода контроллера составляет:
(0,5/500)/5x100 = 0,02 1/с.
Теперь мы можем рассчитать параметры настройки контроллера для получения QAD реакции следующим образом:
Для PID-контроллера:
Пропорциональное усиление = 1,2 / ( SL* Lp) = 1,2/(0,02*100) = 0,6
Время интегрирования, TI = 2,0 Lp = 2,0*100 с = 3,33 мин.
Время дифференцирования, TD = 0,5 Lp = 0,5*100 с = 50 с.
Дата добавления: 2014-12-02; просмотров: 1354;