Лабораторная работа № 2.
Тема: Составление структурных и кинематических схем механизмов. Структурный анализ механизмов.
Цель работы:
- ознакомление с принципом действия и строением наиболее распространенных механизмов (по имеющимся моделям);
- изучение применяемых для обозначения на кинематических схемах условных изображений звеньев и кинематических пар;
- составление структурных схем механизмов;
- составление кинематических схем механизмов по размерам, снятым с моделей плоских механизмов;
- определение степени подвижности механизма;
- определение входных звеньев;
- выявление пассивных связей и местных подвижностей;
- определение класса и порядка каждой группы Ассура, входящей в состав механизма;
- определение класса и порядка механизма в целом;
- составление формулы структурного строения механизма.
Порядок проведения работы:
1. Ознакомиться с механизмом, установить его назначение и название.
2. Приведя в движение входное звено, проследить характер движения промежуточных и выходного звеньев.
3. Определить какие кинематические пары образуют звенья механизма друг с другом (плоские или пространственные, высшие или низшие, вращательные или поступательные, определить класс пары).
4. Составить структурную схему механизмов. Для этого:
а) вычертить одно из положений входного звена, при котором достаточно хорошо видны все остальные звенья;
б) Построить положение остальных звеньев механизма;
в) Пронумеровать звенья арабскими цифрами в порядке их присоединения к входному звену механизма;
г) обозначить кинематические пары большими буквами латинского алфавита.
5. Измерить необходимые параметры звеньев: расстояния между центрами шарниров, постоянные углы между плечами звеньев. Составить таблицу звеньев (в нее включить длину звена в метрах, название звена).
6. Выбрать масштабный коэффициент длины (μℓ) для построения кинематической схемы.
7. Перевести размеры звеньев в миллиметры чертежа.
8. Построить кинематическую схему механизма. Для этого:
а) провести разметку всех неподвижных центров шарниров, соединяющих стойку с подвижными звеньями, и нанести положение неподвижных направляющих поступательных кинематических пар механизма;
б) повторить подпункты а - г пункта 4.
9. Направление движения входного звена показать стрелкой.
10. Выполнить структурный анализ механизма в соответствии с пунктом 1.11.
Пример оформления отчета представлен в приложении 1.
Контрольные вопросы:
1) Что называется механизмом?
2) Что называется звеном механизма?
3) Что называется входным, выходным, промежуточными звеньями?
4) Как классифицируются звенья по виду движения?
5) Что называется кинематической парой?
6) Как классифицируются кинематические пары по числу условий связи и по числу степеней свободы?
7) Какие кинематические пары относятся:
а) к высшим;
б) к низшим;
в) к плоским;
г) к пространственным?
8) Что называется кинематической цепью?
9) Чем отличается механизм от кинематической цепи?
10) Какие виды кинематических цепей существуют?
11) Какой механизм называется шарнирным?
12) Как классифицируются рычажные механизмы в зависимости от звеньев, входящих в их состав?
13) Дать определение структурной и кинематической схемы механизма.
14) Что такое масштабный коэффициент?
15) Как связаны между собой детали, образующие подвижное звено?
16) Как связаны между собой детали, образующие неподвижное звено?
17) Укажите, какие из перечисленных кинематических пар высшие, а какие – низшие:
а) подшипник скольжения и вал, вращающийся в нем;
б)каретка, перемещающаяся в направляющих и соприкасающаяся с ними по поверхности;
в) контакт зубьев двух зубчатых колес;
г) винт и неподвижная опора, в которой он вращается.
18) Детали каких пар подвергаются большему износу и почему?
19) Начертите условные изображения следующих элементов кинематических схем:
а) соединение двух подвижных звеньев, составляющих вращательную пару;
б) соединение подвижного и неподвижного звеньев, составляющих вращательную пару;
в) соединение неподвижного звена и подвижного, перемещающегося поступательно;
г) подшипник: радиальный и упорный:
д) передачи зубчатые - цилиндрическую, коническую и червячную.
20) Какие виды кинематических цепей вы знаете?
21) Что определяет степень подвижности?
22) По какой формуле определяется степень подвижности механизма?
23) Сколько степеней свободы имеет свободное звено в плоскости?
24) Сколько степеней свободы отнимает от механизма низшая пара и сколько высшая?
25) Влияют ли размеры звеньев на принцип действия механизмов?
26) Учитывают ли конструктивную форму звеньев при вычерчивании кинематических схем механизмов?
27) Какой размер звена вычерчивается на схеме: полная длина звена или расстояние между центрами кинематических пар?
28) Определите истинную длину звена, если отрезок, изображающий это звено на кинематической схеме ℓ=200 мм, а масштабный коэффициент длины μℓ=0,005 м/мм.
29) Какими кинематическими парами (низшими или высшими) сочленены звенья кривошипно-ползунного механизма?
30) Какие задачи решаются в ходе структурного анализа механизмов? В чем сущность структурной классификации плоских механизмов?
31) Что называется группой Ассура? Как определяются класс, порядок, и вид группы Ассура? Приведите примеры групп Ассура.
32) Объясните физический смысл числовых коэффициентов в структурной формуле общего вида.
33) Как определяется класс механизма?
34) Что собой представляют пассивные связи, какое влияние они оказывают на механизм?
35) Объясните назначение местных подвижностей.
36) Каким образом структурную классификацию плоских механизмов можно распространить на механизмы с высшими кинематическими парами?
ПРИЛОЖЕНИЕ 1
| «Структурный анализ механизмов» | |||||
| Структурная схема механизма | Таблица кинематических пар | ||||
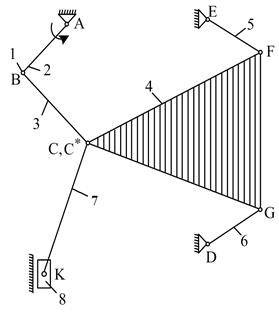
| Обозначение КП | Звенья, ее составляющие | Тип КП | Класс КП | |
| A B C C* F E G D K K* | (I-2) (2-3) (3-7) (4-7) (4-5) (5-1) (4-6) (6-1) (7-8) (8-1) | НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПП | P5 P5 P5 P5 P5 P5 P5 P5 P5 P5 | ||
| РЕЗУЛЬТАТЫ НАБЛЮДЕНИЙ: | |||||
| Число подвижных звеньев: n=7 | |||||
| Число кинетических пар пятого класса: P5 = 10 | |||||
| Число кинематических пар четвертого класса: P4 = 0 | |||||
| ОПРЕДЕЛЕНИЕ СТЕПЕНИ ПОДВИЖНОСТИ МЕХАНИЗМА ПО ФОРМУЛЕ ЧЕБЫШЕВА W = 3·n-2·P5-P4 = 3·7-2·10 = 1 | |||||
| Название звеньев: | I – стойка 2 – кривошип 3,4,7 – шатун 5,6 – коромысло 8 – ползун | ||||
| Структурный анализ механизма | ||||
| Схема начального механизма | Класс, порядок | Звенья, входящие в состав механизма | Последовательность соединения звеньев | |

| I 1 | (I-2) | I - A - 2 | |
| Группы Ассура, входящие в состав механизма | ||||
| Схема групп | Класс, порядок | Вид | Звенья, ее составляющие | Последователь- ность соединения звеньев |
| II 2 | (2) | (7-8) | 4-C*-7-K-8-K*-1 |
| III 3 | - | 3-4-5-6 | 2-B-3-C-4-F-5-E-1 | G | | D | |
| Формула структурного строения: I1(1-2) -› III3(3-4-5-6) -› II2(2)(7-8) | ||||
| Класс и порядок механизма: III класс 3 порядок |
| Структурный анализ механизма | ||||
| Схема начального механизма | Класс, порядок | Звенья, входящие в состав механизма | Последовательность соединения звеньев | |
| I 1 | (I-5) | I-E-5 | |
| Группы Ассура, входящие в состав механизма | ||||
| Схема групп | Класс, порядок | Вид | Звенья, ее составляющие | Последовательность соединения звеньев |
| II 2 | (I) | (2-3) | 1-A-2-B-3-C-4 |
| II 2 | (2) | (7-8) | 1-K*-8-K-7-C*-4 |
| II 3 | (I) | (4-6) | 5-F-4-G-6-D-1 |
Формула структурного строения: I1(1-5) -› II2(1)(4-6) -› 
| ||||
| Класс и порядок механизма: II класс 2 порядок |
| «Структурный анализ механизмов» | |||||||||||||
| Структурная схема механизма | Таблица кинематических пар | ||||||||||||
| Действительный механизм | 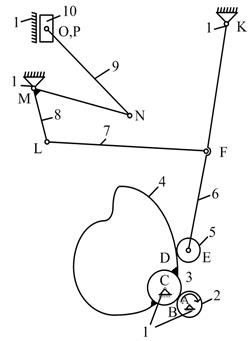
| Обозначение КП | Звенья, ее составляющие | Тип КП | Класс КП | ||||||||
| A B C D E F K L M N O P | (1-2) (2-3) (1-3) (4-5) (5-6) (6-7) (6-1) (7-8) (8-1) (8-9) (9-10) (10-1) | НКПВ ВКП НКПВ ВКП НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ | P5 P4 P5 P4 P5 P5 P5 P5 P5 P5 P5 P5 | ||||||||||
| Заменяющий механизм | 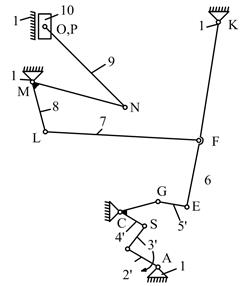
| A Z S C G E F K L M N P O | (1-2’) (2’-3’) (3’-4’) (4’-1) (4’-5’) (5’-6) (6-7) (6-1) (7-8) (8-1) (8-9) (9-10) (10-1) | НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПВ НКПП | P5 P5 P5 P5 P5 P5 P5 P5 P5 P5 P5 P5 P5 | ||||||||
| Результаты наблюдений | Действительный механизм | Заменяющий механизм | |||||||||||
| Число подвижных пар звеньев | |||||||||||||
| Число кинематических пар пятого класса P5 | |||||||||||||
| Число кинематических пар четвертого класса P4 | - | ||||||||||||
| ОПРЕДЕЛЕНИЕ СТЕПЕНИ ПОДВИЖНОСТИ а) действительного механизма: W=3·8-2·10-2=2 б) заменяющего механизма: W=3·9-2·13=1 | |||||||||||||
| Название звеньев механизма | Действительного механизма | Заменяющего механизма | |||||||||||
| 1 – стойка 2,3 – зубчатые колеса 4 – кулачок 5 – ролик толкателя 6 – коромысло толкателя 7,9 – шатун 8 – коромысло 10 - ползун | 1 – стойка 2’, 4’ – кривошип 3’,5’,7,9 – шатун 6,8 – коромысло 10 - ползун | ||||||||||||
| Структурный анализ механизма | |||||||||||||
| Схема начального механизма | Класс, порядок | Звенья, входящие в состав механизма | Последовательность соединения звеньев | ||||||||||

| I 1 | (I-2) | I – A - 2 | ||||||||||
| Группы Ассура, входящие в состав механизма | ||||
| Схема групп | Класс, порядок | Вид | Звенья, ее составляющие | Последовательность соединения звеньев |
| II 2 | (2) | (10-9) | 1-O-10-P-9-N-8 |

| II 2 | (1) | (8-7) | 1-M-8-L-7-F-6 |

| II 2 | (1) | (5’-6) | 1-K-6-E-5’-G-4’ |

| II 2 | (1) | (4’-3’) | 1-C-4’-S-3’-Z-2’ |
| Формула структурного строения: I1(1-2’) -›II2(1)(3’-4’) -›II2(1)(6-5’) -›II2(1)(8-7) -›II2(2)(9-10) | ||||
| Класс и порядок механизма: II класс 2 порядок |
Дата добавления: 2018-03-01; просмотров: 2426;