Замена высших кинематических пар низшими
В структурной классификации, а также при решении некоторых задач кинематического анализа механизмов с высшими парами пользуются условной заменой высших пар низшими. Каждую высшую пару условно заменяют одним добавочным звеном, входящим в две низшие пары. При этом должны выполняться два условия структурной эквивалентности:
– заменяющий механизм должен обладать той же степенью подвижности, что заменяемый;
– заменяющий механизм с низшими парами должен иметь такие же мгновенные относительные движения, как и механизм до замены высших пар.
Сформулируем общие правила замены высших кинематических пар низшими:
1.Если высшие пары представляют собой соприкасающиеся окружности, то для выполнения этих условий, через точку касания звеньев 1 и 2 проводится нормаль n-n к профилям, образующим высшую пару (Рис.13.а). На этой нормали в центрах кривизны помещают шарниры, которые соединяются условным звеном 3. Размер фиктивного звена должен быть равен сумме радиусов кривизны профилей, образующих высшую пару.
2. Если высшие пары представляют собой окружность или любую произвольную кривую, с одной стороны, и точечный контакт, с другой стороны, то для точечного контакта радиус кривизны равен нулю (вращательная пара совпадает с точкой контакта), то кинематические пары замены находятся в точке контакта и в центре кривизны (Рис.13.в).
3. Если один из профилей – прямая линия, то его центр будет бесконечно удалён, т.е. в цепи замены движение должно осуществляться по прямой, а не по окружности и вращательная пара с фиктивным звеном заменяется поступательной. Затем условное звено соединяют вновь введёнными низшими парами с теми звеньями, которые входили в высшую пару (Рис.13.б).
На Рис.13. показаны механизмы с высшими парами, а на Рис.14. заменяющие их рычажные механизмы.
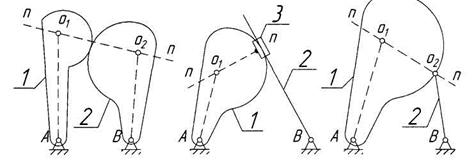
Риc. 13 Механизмы с высшими парами
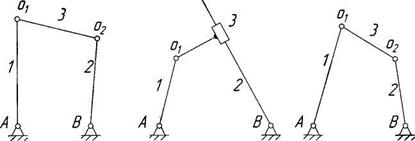
Рис. 14 Заменяющие механизмы
Дата добавления: 2018-03-01; просмотров: 3988;